 实测14us,Linux-RT实时性能及开发案例分享—基于全志T507-H国产平台
实测14us,Linux-RT实时性能及开发案例分享—基于全志T507-H国产平台

本文带来的是基于全志T507-H(硬件平台:创龙科技TLT507-EVM评估板),Linux-RT内核的硬件GPIO输入和输出实时性测试及应用开发案例的分享。本次演示的开发环境如下:
Windows开发环境:Windows 7 64bit、Windows 10 64bit
Linux开发环境:Ubuntu18.04.4 64bit
虚拟机:VMware16.2.5
U-Boot:U-Boot 2018
Kernel:Linux-RT-4.9.170
SDK:LinuxSDK-V2.0
分享案例:rt_gpio_ctrl、rt_input案例
测试工具:示波器
测试数据汇总
基于全志T507-H(硬件平台:创龙科技TLT507-EVM评估板),按照创龙科技提供的案例用户手册进行操作,得出如下测试结果。
备注:测试数据与实际测试环境有关,仅供参考。
测试结果如下表所示:
表1Linux-RT GPIO输入输出案例测试数据
| GPIO输入延时 | 系统延迟 | GPIO输出延时 | 输入输出总延时 | |
| 测试1 | 37us | 9us | 14us | 60us |
| 测试2 | 53us | 9us | 14us | 76us |
| 测试3 | 57us | 9us | 14us | 80us |
| 测试4 | 60us | 9us | 14us | 83us |
(1)GPIO输入延时:通过使用示波器测量按键事件触发LED电平翻转的实际耗时结合系统延时与GPIO输出延时得出数据;
(2)系统延迟:根据Linux-RT性能测试平均值得出数据;
(3)GPIO输出延时:通过使用示波器测量LED电平翻转的实际耗时得出数据。
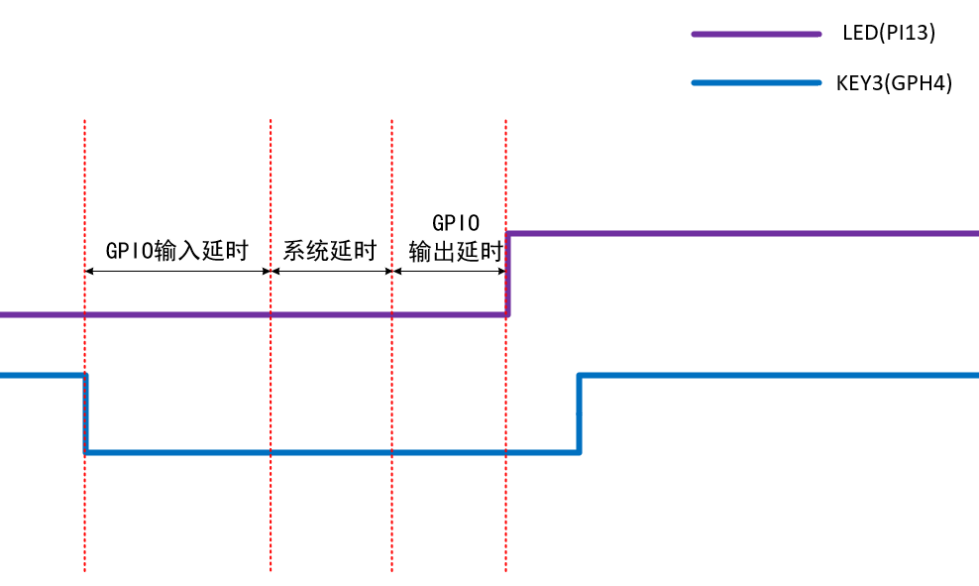
图1
表 2Linux-RT实时性测试数据
|
Min Latencies (最小值) |
Avg Latencies (平均值) |
Max Latencies (最大值) |
|
| CPU空载状态 | 5us | 7us | 86us |
| CPU满负荷状态 | 5us | 9us | 88us |
| 隔离CPU核心状态 | 5us | 9us | 38us(CPU3) |
根据不隔离CPU核心、隔离CPU核心三种状态的测试结果可知:当程序指定至隔离的CPU3核心上运行时,Linux系统延迟最低,可有效提高系统实时性。故推荐对实时性要求较高的程序(功能)指定至T507-H隔离的CPU核心运行。
Linux-RT实时性测试
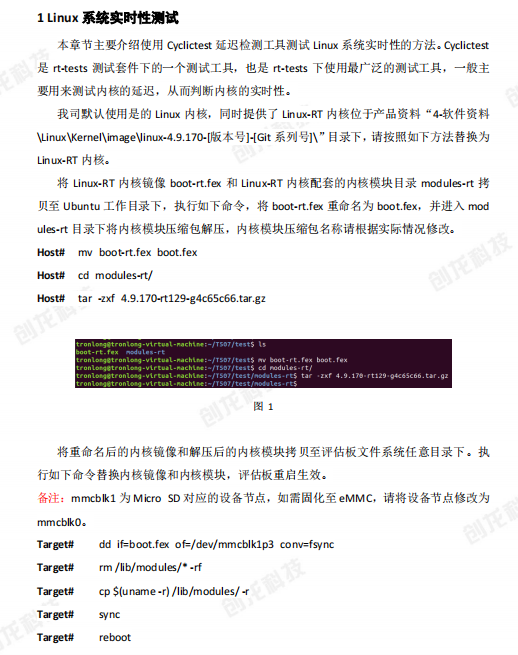
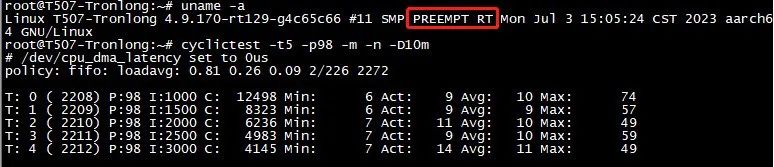
本次测试是使用Cyclictest延迟检测工具测试Linux系统实时性。Cyclictest是rt-tests测试套件下的测试工具,也是rt-tests下使用最广泛的测试工具,一般主要用来测试内核的延迟,从而判断内核的实时性。Cyclictest主要通过反复测量并精确统计线程的实际唤醒时间,以提供有关系统的延迟信息。它可测量由硬件、固件和操作系统引起的实时系统的延迟。
使用Cyclictest测试系统实时性
基于全志T507-H(硬件平台:创龙科技TLT507-EVM评估板),按照创龙科技提供的案例用户手册进行操作,使用Cyclictest程序测试系统实时性,得出如下测试结果。
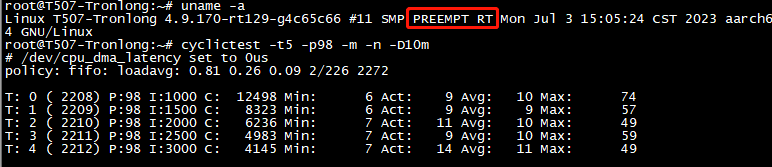
图2Linux-RT-4.9.170内核测试结果
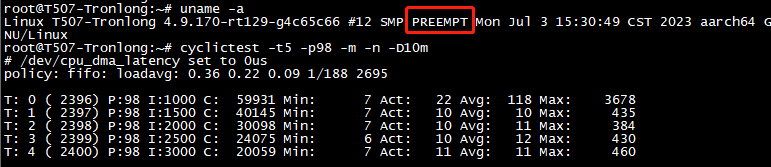
图3Linux-4.9.170内核测试结果
对比测试数据,可看到基于Linux-RT-4.9.170内核的系统的延时更加稳定,最大延时更低,系统实时性更佳。
T507-H核心板典型应用场景
Linux-RT应用案例的分享
rt_gpio_ctrl案例
案例说明
通过创建一个基本的实时线程,在线程内触发LED的电平翻转,同时程序统计实时线程的调度延时,并通过示波器测出LED电平两次翻转的时间间隔。由于程序默认以最高优先级运行,为避免CPU资源被程序完全占用,导致系统被挂起,因此在程序中增加100us的延时。程序原理大致如下:
(1)在Linux-RT内核上创建、使用实时线程。
(2)实时线程中,计算出触发LED电平翻转的系统调度延时。
案例测试
将可执行文件拷贝至评估板文件系统,并执行如下命令运行测试程序,再按"Ctrl + C"退出测试,串口终端将打印程序统计的延时数据,如下图所示。
Target# ./rt_gpio_ctrl 100
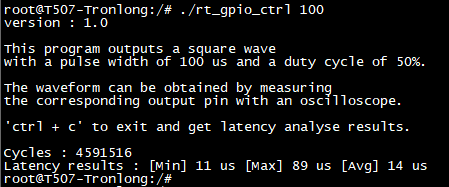
图5
同时使用示波器捕捉LED两次电平翻转之间的间隔就对应上线程调度的延迟。算出电平两次翻转的时间间隔为∆x = 114us,如下图所示。由于程序中默认增加了100us的时间延时。因此,实际延时应为:114us-100us = 14us,与程序统计打印的Latency results平均值相近。
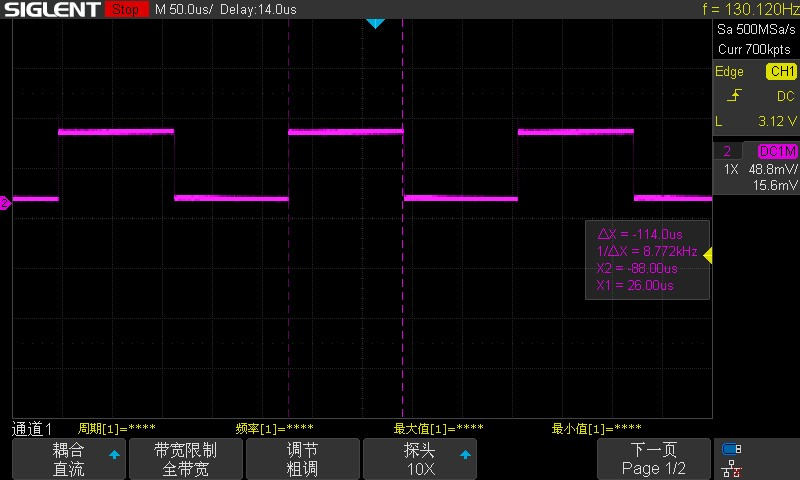
图6
rt_input案例
案例说明
通过创建一个基本的实时线程,在线程内打开input设备,并对按键事件进行监听,然后触发LED的电平翻转,再通过示波器测量按键触发到LED电平翻转期间的实际耗时。程序原理大致如下:
(1)在Linux-RT内核上创建、使用实时线程。
(2)实时线程中对打开的input设备节点进行按键事件监听,通过判断监听得到的按键事件来触发LED的电平翻转。
案例测试
将可执行文件拷贝至评估板文件系统,并执行如下命令运行测试程序,程序运行后按下KEY3用户按键点亮LED,松开按键后LED熄灭,再按"Ctrl + C"退出测试程序。
Target#./rt_input /dev/input/event8
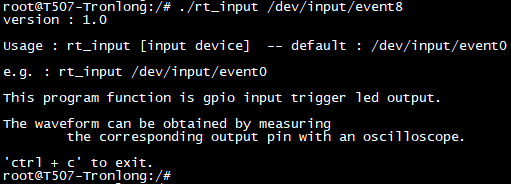
图7
分别使用示波器探头1测量按键KEY3引脚1,使用示波器探头2测量LED。
从按键下降沿触发的开始(下图黄线)到LED
上升沿触发
的完成(下图蓝线)的时间间隔,即为系统实时捕获按键输入时间并响应触发LED电平翻转的时间∆x,从图中可看到∆x = 76us。
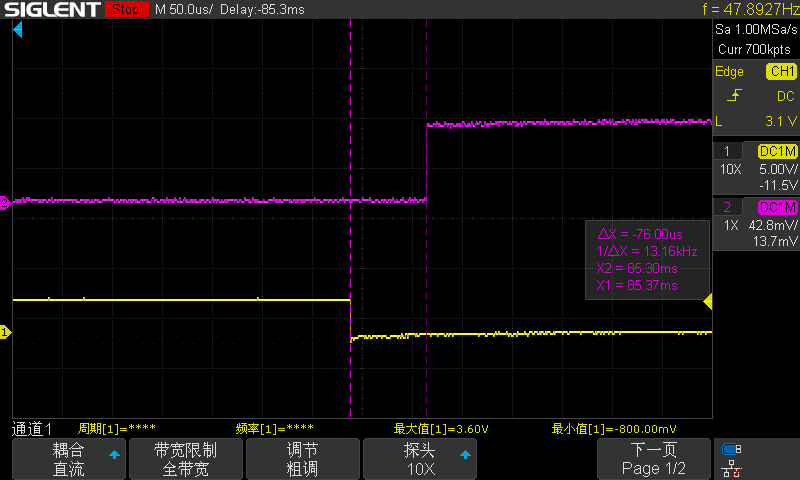
图8
审核编辑 黄宇
-
示波器
+关注
关注
113文章
7146浏览量
197038 -
Linux
+关注
关注
88文章
11850浏览量
219774 -
GPIO
+关注
关注
16文章
1336浏览量
56563 -
全志
+关注
关注
25文章
320浏览量
55055
发布评论请先 登录
国产工业CPU平台,米尔基于全志T507-H开发板的实时性分析与测试

实测14us,Linux-RT实时性能及开发案例分享—基于全志T507-H国产平台
国产!全志科技T507-H工业核心板( 4核ARM Cortex-A5)规格书
实测14us,Linux-RT实时性能及开发案例分享—基于全志T507-H国产平台
全志T507-H国产平台Ubuntu系统正式发布,让您的应用开发更便捷!
全志A40i开发板——Linux-RT内核应用开发教程(2)
第一视角体验搭载全志T507-H的开发板MYD-YT507H开发板
国产工业CPU平台,米尔基于全志T507-H开发板的实时性分析与测试
米尔推出基于全志T507-H的MYC-YT507H核心板
【资料分享】全志科技T507-H工业核心板规格书
基于全志T507-H的Linux-RT + Igh EtherCAT主站案例分享



评论