 CANoe使用常见问题汇总
CANoe使用常见问题汇总
CANoe使用问题汇总。
1.如何将CAPL文件加密
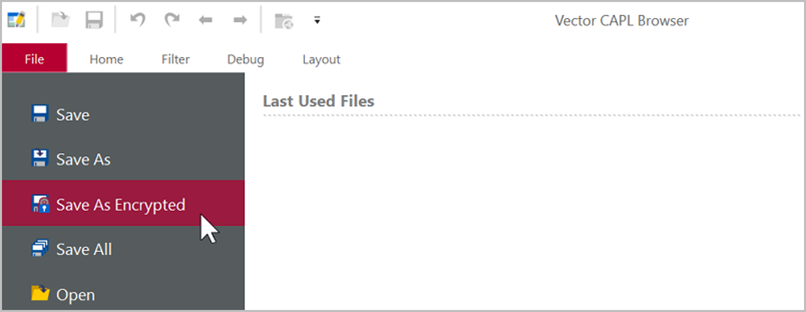
使用CAPL Browser打开需要加密的CAPL文件*.can进行编译,编译通过后,点击菜单栏File -> Save as Encrypted,将*.canencr文件保存到*.can文件相同的路径中(*.canencr文件就是*.can文件的加密文件),将*.can文件从当前路径移除,CANoe也可以正常运行。
对*.cin文件进行加密与上述类似,用CAPL Browser打开*.cin文件进行编译,编译通过后,在相同路径下另存为*.cinencr文件,移除*.cin文件即可。
2.CAN报文中未使用位的检测
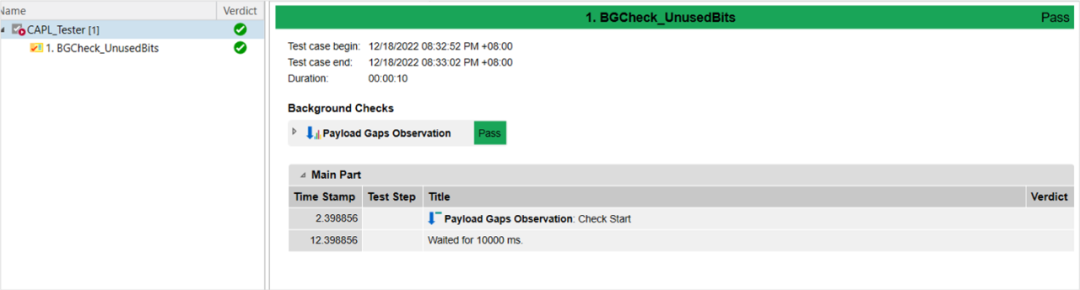
若想要检查某个报文未使用位的值是否满足要求,可用ChkStart_PayloadGapsObservation函数。若想要检查某个节点中所有TX报文或者RX报文未使用位的值是否满足要求,可使用ChkStart_PayloadGapsObservationTx/ChkStart_PayloadGapsObservationRx函数。关于函数的具体介绍请参考CANoe Help文档。文档以示例工程Demo_Check_Unused_Bit为例,通过调用函数ChkStart_PayloadGapsObservation来检测CAN报文未使用位的值是否为0,若为0则测试通过,否则测试失败。测试代码(CAPL_Tester节点)示例如图二所示:
includes
{
}
variables
{
dword checkId;
}
void MainTest ()
{
BGCheck_UnusedBits();
}
testcase BGCheck_UnusedBits() // 报文的未使用位检测
{
checkId = ChkStart_PayloadGapsObservation(message_1,0); // 检查报文的未使用位值是否为0,函数的第一个参数为需检查报文的名称,第二个参数为未使用位期望的数值
TestAddCondition(checkId); // 添加检测条件,若报文未使用位的数值不满足要求,则会在报告中记录下来
TestWaitForTimeout(10000); // 持续检测10s
TestRemoveCondition(checkId);// 移除检测条件
}
运行CAPL_Tester测试模块,在测试时间内通过按键‘a’发送一帧名为message_1(ID为0x123)的报文,该报文中未使用位bit15的值为0,未使用位值满足要求,测试通过(报告如图二所示)。
3.如何安装和使用CANoe MATLAB插件
首先需要检查CANoe、插件MATLAB的版本兼容性,以及MATLAB与编译器的版本兼容性,检查方法可在CANoe的User Assistance找到:
搜索打开MATLAB Integration Package,之后点击MATLAB Integration Package Version History查看。
同样在MATLAB Integration Package页面,点击打开Compiler Configuration查看。
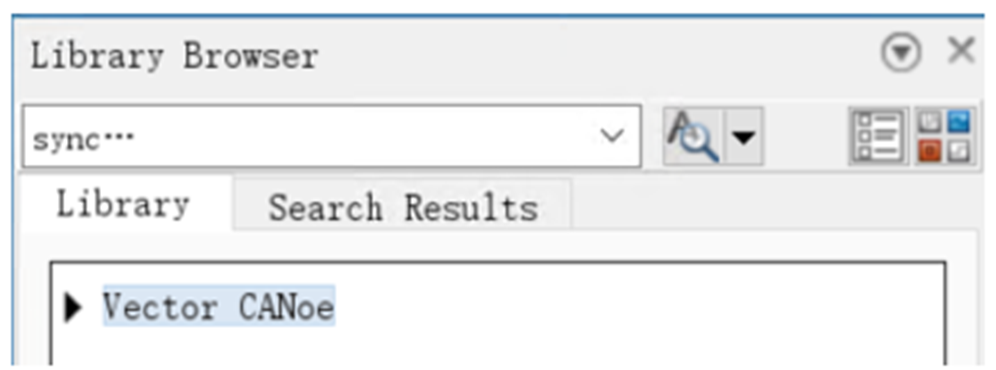
检查完兼容性后,就是插件安装了,在CANoe的安装目录下,Vector CANoe 17Installer Additional ComponentsMatlab,右击使用管理员权限安装。当在Simulink Library Browser看到Vector CANoe分类时,安装已成功。

插件的使用可以查询CANoe自带的使用说明文档,Using_MATLAB_with_CANoe.pdf。
4.使用CANoe比较两个记录文件的信号
关于如何使用Graphics窗口直观地比较两个不同的CAN记录文件中的相同信号。可以按照下面提到的四个步骤进行:
1.打开CANoe:使用两个CAN通道的模板来创建一个新的CANoe工程(CAN 500 kBaud 2ch)。
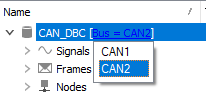
2.配置为Offline模式:在Measurement Setup窗口中右键单击离线文件列表,打开Offline Mode Configuration对话框。跳转到Channel mapping 并添加一个新的设置。配置Bus Type为CAN,Source Channel设置为1(或任何一个有所需信号的通道)以及Destination Channel设置为2(或其他除Source Channel以外的数字),然后点击OK。
3.添加所需文件:在两个通道上添加相同的DBC文件。在Measurement Setup窗口的离线文件列表中添加两个记录文件。对于其中一个记录文件,选择步骤2中创建的通道匹配设置。
3.查看图形:在Measurement Setup窗口中打开Graphics窗口。添加两个通道中的同一个信号,添加时请确保分别选择了对应的通道。运行工程,观察从两个记录文件中得出的两个信号图形。
5.如何为DoIP Tester定义特定TCP源端口
要为DoIP Tester发送的数据包定义特定的TCP源端口,请按照以下步骤操作:
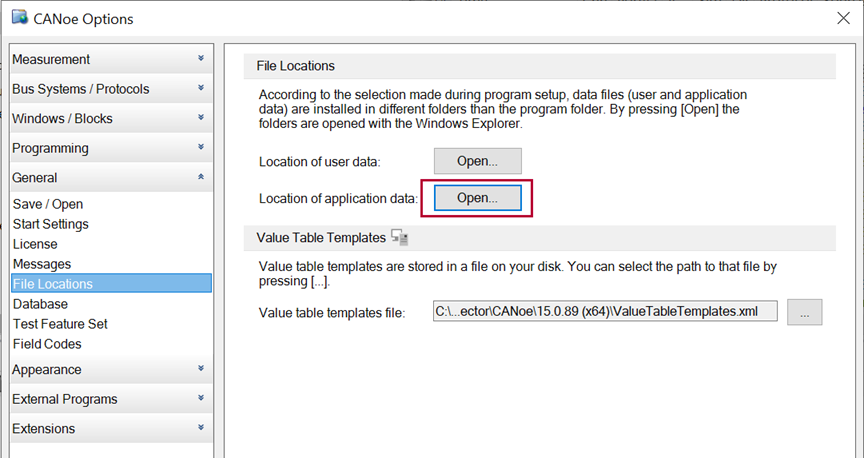
进入CANoe Options并打开应用程序数据位置:
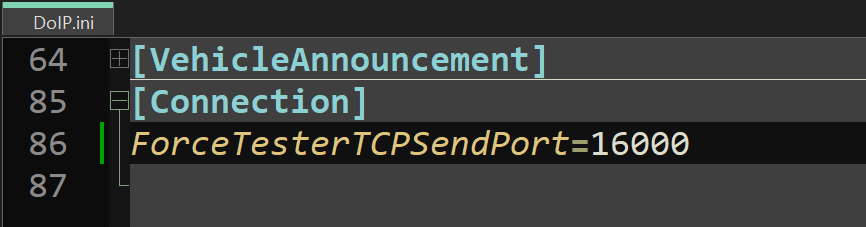
然后关闭CANoe。应用程序数据文件夹包含一个名为DoIP.ini的文件。用文本编辑器打开该文件。在文件末尾添加以下部分,以设置特定的TCP端口:[Connection] ForceTesterTCPSendPort=[Port],然后保存。
6.CAN TP 如何接收超过4095字节的数据?
CAN TP中默认的接收缓存是4095字节,可以使用CAPL 函数CanTpSetMaximumReceiveLength 来增加TP层接收缓存区的大小,如下,目前CANoe 支持最大16MB的数据传输。
on start
{
dword maxLength =8000;
CanTpSetMaximumReceiveLength(gRxHandle,maxLength); // gRxHandle: 用于建立CAN TP层连接的句柄
}
7.如何在CAPL中访问信号和系统变量的Value Table条目
信号和系统变量可以具有描述特定值的Value Table。这些Value Description也可以在CAPL中访问,以获得更好的可读性/对实际CAPL代码的解释。引用Value Description(而不是实际值)和查找特定值的Value Description都是可行的。
在Switch/Case中引用Value Description(而不是实际值)的示例:
Switch(@SystemVariable)
{
case (sysvar:
// do whatever you want to do"
}
8.关于CANoe测试报告问题
1>.如何设置测试报告格式
在CANoe Options | General | Test Feature Set | Reporting File Format处选择测试报告格式。
2>测试报告格式转换
Test Report Viewer format转换为PDF格式使用工具Vector CANoe Test Report Viewer打开*.vtestreport文件,点击File | Export | Export PDF,可以将测试报告转为PDF格式
3>Test Report Viewer format转换为XML格式
使用工具Vector CANoe Test Report Viewer打开*.vtestreport文件,点击File | Export | Export XML,可以将测试报告转为XML格式。
9.Ethernet/CAN 网关
CAPL实现ETH转CAN,网关先收到一帧UDP报文,以表示启动。这帧报文可以由Ethernet IG 来进行仿真。这帧报文以两个CAN报文的组成形式,从网关转发出去。每帧CAN报文至少包含14个字节,内容包括CAN-Id, -dlc, -rtr 以及data bytes。
variables
{
//
// Constants
//
const WORD kPort = 23; // UDP port number for instance
const WORD kRxBufferSize = 1500;
const WORD kTxBufferSize = 1500;
//
// Structure of UDP payload
//
_align(1) struct CANData
{
BYTE dlc;
BYTE flags; // Bit 7 - Frame type (0 = standard, 1 = extended)
// Bit 6 - RTR bit ('1' = RTR bit is set)
DWORD canId;
BYTE canData[8];
};
//
// Global variables
//
UdpSocket gSocket;
CHAR gRxBuffer[kRxBufferSize];
CHAR gTxBuffer[kTxBufferSize];
DWORD gOwnAddress;
DWORD gModuleAddress= 0xFFFFFFFF; // default is the broadcast address 255.255.255.255 and the TCP/IP stack will build the Network broadcast address
}
//
// Measurement start handler
//
on start
{
DWORD addresses[1];
// get own IP address of the Windows TCP/IP stack
IpGetAdapterAddress( 1, addresses, elcount(addresses) );
gOwnAddress = addresses[0];
// open UDP socket
gSocket = UdpSocket::Open( 0, kPort );
if (gSocket.GetLastSocketError() != 0)
{
write( "<%BASE_FILE_NAME%> Open UDP socket failed, result %d. Measurement stopped!", gSocket.GetLastSocketError() );
stop();
return;
}
if (gSocket.ReceiveFrom( gRxBuffer, elcount(gRxBuffer) ) != 0)
{
if (gSocket.GetLastSocketError() != 997) // ignore pending IO operation
{
write( "<%BASE_FILE_NAME%> UDPReceive failed, result %d. Measurement stopped!", gSocket.GetLastSocketError() );
stop();
return;
}
}
}
//
// On receive UDP data handler using CAPL Callback
//
void OnUdpReceiveFrom( dword socket, long result, dword address, dword port, char buffer[], dword size)
{
DWORD dataOffset;
struct CANData canData;
message * canMsg;
if (address == gOwnAddress) return; // ignore own broadcasts
//
// Store IP address of module to reach
//
if (gModuleAddress == 0)
{
gModuleAddress = address;
}
//
// Handle received data
//
dataOffset = 0;
while (dataOffset + __size_of(struct CANData) <= size)
{
memcpy( canData, buffer, dataOffset );
canMsg.id = (canData.canId & 0x1FFFFFFF) | ((canData.flags & 0x80) ? 0x80000000 : 0);
canMsg.dlc = canData.dlc & 0x0f;
canMsg.rtr = ((canData.flags & 0x40) ? 1 : 0);
canMsg.byte(0) = canData.canData[0];
canMsg.byte(1) = canData.canData[1];
canMsg.byte(2) = canData.canData[2];
canMsg.byte(3) = canData.canData[3];
canMsg.byte(4) = canData.canData[4];
canMsg.byte(5) = canData.canData[5];
canMsg.byte(6) = canData.canData[6];
canMsg.byte(7) = canData.canData[7];
output( canMsg );
dataOffset += __size_of(struct CANData);
}
//
// Receive more data
//
if (gSocket.ReceiveFrom( gRxBuffer, elcount(gRxBuffer) ) != 0)
{
if (gSocket.GetLastSocketError() != 997) // ignore pending IO operation
{
write( "<%BASE_FILE_NAME%> UDPReceive failed, result %d. Measurement stopped!", gSocket.GetLastSocketError() );
stop();
return;
}
}
}
//
// Handler for CAN messages
//
on message *
{
int i;
struct CANData canData;
if ((this.dir == RX) && (gModuleAddress != 0))
{
canData.canId = this.id & 0x1FFFFFFF;
canData.flags = ((this.id & 0x80000000) ? 0x80 : 0x00) | ((this.rtr == 1) ? 0x40 : 0x00);
canData.dlc = this.dlc;
for( i = 0; i < 8; i++ )
{
canData.canData[i] = (i < this.dlc) ? this.byte(i) : 0;
}
memcpy( gTxBuffer, canData );
gSocket.SendTo( gModuleAddress, kPort, gTxBuffer, __size_of(struct CANData) );
}
else if (gModuleAddress == 0)
{
write( "<%BASE_FILE_NAME%> Tx not possible. Module to reach must send packets first." ); //Server simulation
}
}
审核编辑:黄飞
-
matlab
+关注
关注
178文章
2929浏览量
228953 -
编译器
+关注
关注
1文章
1587浏览量
48796 -
CANoe
+关注
关注
3文章
60浏览量
8492
原文标题:CANoe使用问题汇总
文章出处:【微信号:eng2mot,微信公众号:汽车ECU开发】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
飞思卡尔 KL 系列常见问题和解答汇总篇
三菱PLC之间的N:N无线通讯的常见问题汇总
固德威逆变器wifi设置_方法步骤教程_常见问题汇总
网优工程师面试常见问题汇总资料下载

2.4G频段的SI24R2E无线单发芯片技术问答,常见问题进行汇总解答
TSMaster诊断功能之常见问题汇总






 工商网监
工商网监
评论