 基于国产FPGA的运动控制加速卡
基于国产FPGA的运动控制加速卡
现阶段,大部分的工业运动控制平台和数控运动中的控制中心为PC端控制器,通过PC端控制器控制伺服驱动器,从而实现机械系统中一个或多个坐标上的运动以及运动之间的协调,实现精确的位置控制、速度和加速度控制、转矩和力的控制等。同时,PC端控制器还需要控制其他传感器或运动单元。这种PC端控制器直接控制上述设备的方案,存在效率低、难以做到指令发送或接收的同步处理、延时较大、采集的数据无法做到准确同步等问题。因此需要简化PC端控制器的数据通信量、降低指令延迟、提升控制效率,同时需要获取同步后的数据。中科亿海微研制的FPGA运动控制加速卡主要完成PC端与伺服驱动器、相机、压力及柔性传感器等模块之间的数据通信、数据融合与数据监测。FPGA运动控制加速卡将复杂的控制卸载到FPGA中实现,简化了PC端控制器的控制流程,极大地减小了数据链路通信时间消耗。同时FPGA将同步后的数据发送到PC处理,使得数据处理流程更合理。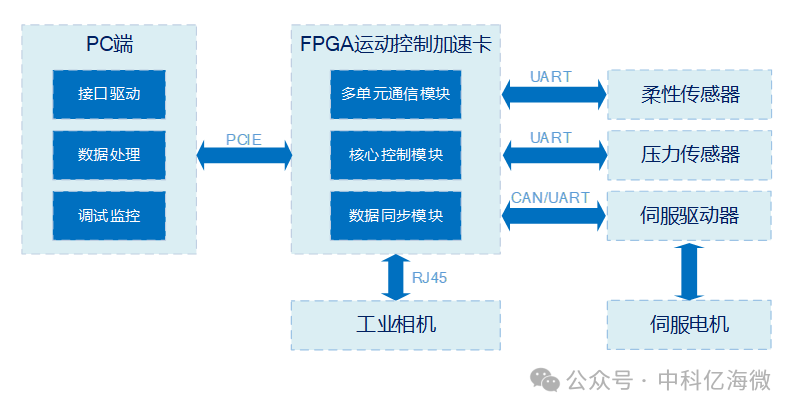
图 基于FPGA的运动控制加速方案系统构成框图
基于FPGA的运动控制加速方案主要由两块板卡构成:以EQ6HL130为核心的同步采集板、以EQ6HL9为核心的柔性传感器采集板。
以EQ6HL130为核心的同步采集板控制伺服驱动器,产生驱动控制伺服电机的指令,同时接收其应答指令,将指令解析处理后结果传输给PC端控制器作进一步操作;接收柔性传感器采集器采集的数据,解析后传输给控制器;接收压力传感器的数据,解析后传输给控制器。对所有接收数据打上时间戳,便于后续使用。
以EQ6HL9为核心的柔性传感器采集板通过AD采集柔性传感器的数据并组帧传输给同步采集板控制;将采集数据转换为压力值显示到显示屏上。
FPGA运动控制加速卡经测试,PC端控制器方案的系统指令延迟大于50ms。基于FPGA的运动控制加速方案的系统指令延迟小于100us,同时伺服电机应答数据、多传感器数据、相机数据能做到完全同步,更具使用意义。
-
FPGA
+关注
关注
1631文章
21807浏览量
606755 -
驱动器
+关注
关注
53文章
8306浏览量
147249 -
控制器
+关注
关注
112文章
16490浏览量
179829 -
运动控制
+关注
关注
4文章
593浏览量
33010
发布评论请先 登录
相关推荐

S7t-VG6 VectorPath加速卡的特性和功能
PCIe加速卡在数据中心的应用
AMD 以全球极快的纤薄尺寸电子交易加速卡扩展 Alveo 产品组合,助力广泛且具性价比的服务器部署

AMD 以全球极快的纤薄尺寸电子交易加速卡扩展 Alveo 产品组合,助力广泛且具性价比的服务器部署
AMD推出新款纤薄尺寸电子交易加速卡
比科奇助力推出首款全国产5G无线云网络加速卡
大模型向边端侧部署,AI加速卡朝高算力、小体积发展
EPSON差分晶振SG3225VEN频点312.5mhz应用于AI加速卡
基于菲数科技FA728Q加速卡实现低时延LLT应用
借助全新 AMD Alveo™ V80 计算加速卡释放计算能力





 工商网监
工商网监
评论