 康谋分享|aiSim5激光雷达LiDAR模型验证方法(二)
康谋分享|aiSim5激光雷达LiDAR模型验证方法(二)

aiSim中的LiDAR是一种基于光线追踪的传感器,能够模拟真实LiDAR发射的激光束,将会生成LAS v1.4标准格式的3D点云,包含了方位角、俯仰角和距离等。
aiSim能够模拟LiDAR单态(Monostatic)和同轴(Coaxial)配置。在aiSim中,LiDAR仿真是将模型建为在某个方向上发射单束光线的点光源,因此,单束光线承载了激光的全部功率。
一、与不同形式降水的相互作用
LiDAR传感器与不同形式的降水有相互作用:
1、雨天
aiSim的LiDAR模型不会将雨滴视为影响激光反射的几何形状,而是基于强度和3D坐标,添加噪声,从而模拟降雨对于ADAS中LiDAR性能的衰减。
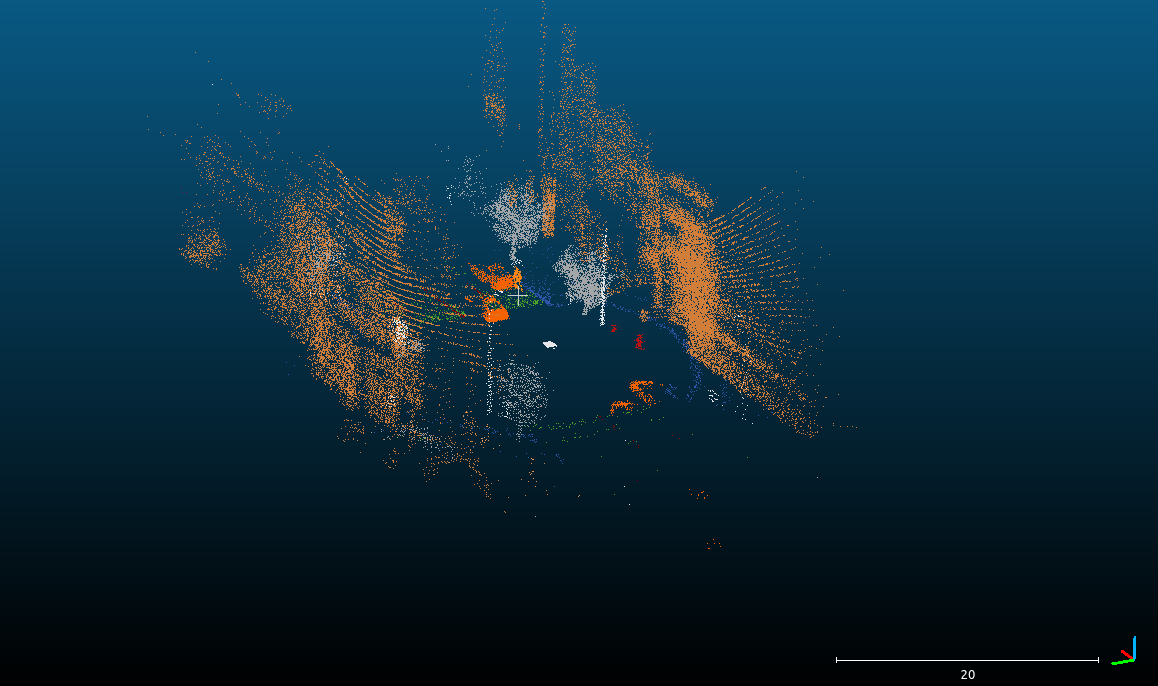 图1:雨天aiSim5激光雷达点云(2L)
图1:雨天aiSim5激光雷达点云(2L)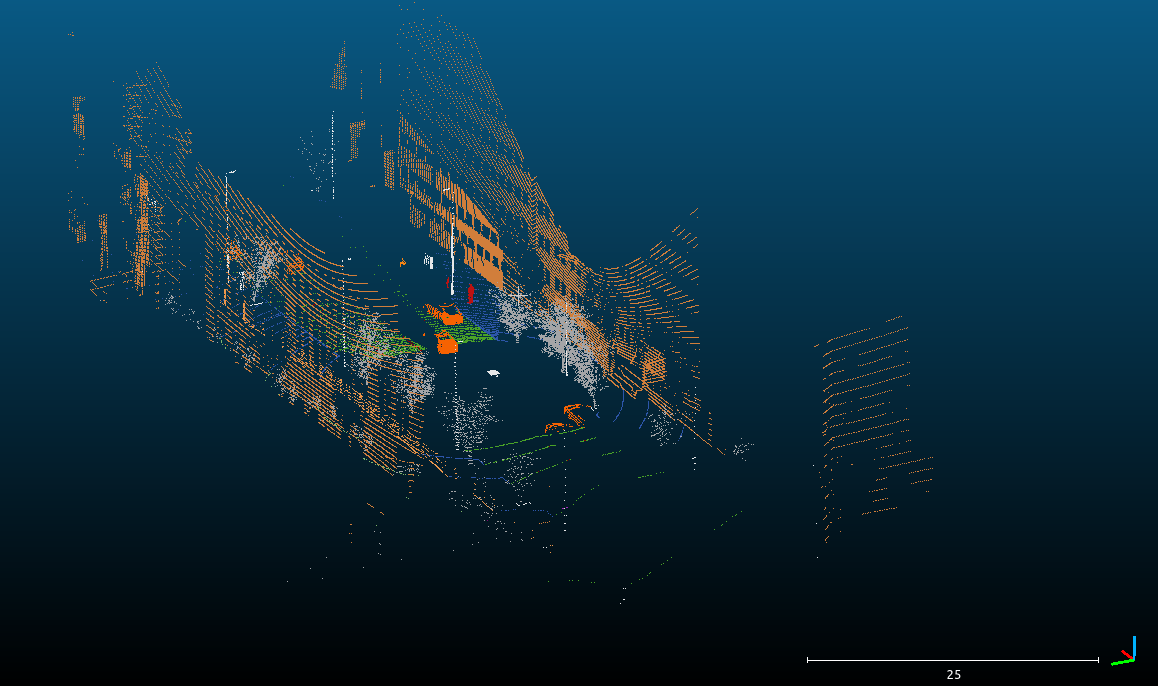 图2:晴天aiSim5激光雷达点云(2L)
图2:晴天aiSim5激光雷达点云(2L)对于雨天的衰减,主要使用公式:
e^(-2·R·γ)
其中R是接收器到物体的距离;γ为大气消光系数,晴天则为0。
2、雾天
aiSim在仿真中设定“浓雾”中水滴半径为5μm,可调整空气中水滴的数量来控制雾气的大小,同样采用了与雨天相同的衰减公式。
3、雪天
aiSim仿真的激光光束一旦击中雪花时,aiSim AIR引擎就会计算返回光束的强度。考虑雪花表面的不规则性,其将会被视为白色漫反射模型,将会导致光束在多个方向上散射,从而影响返回信号的强度和质量。
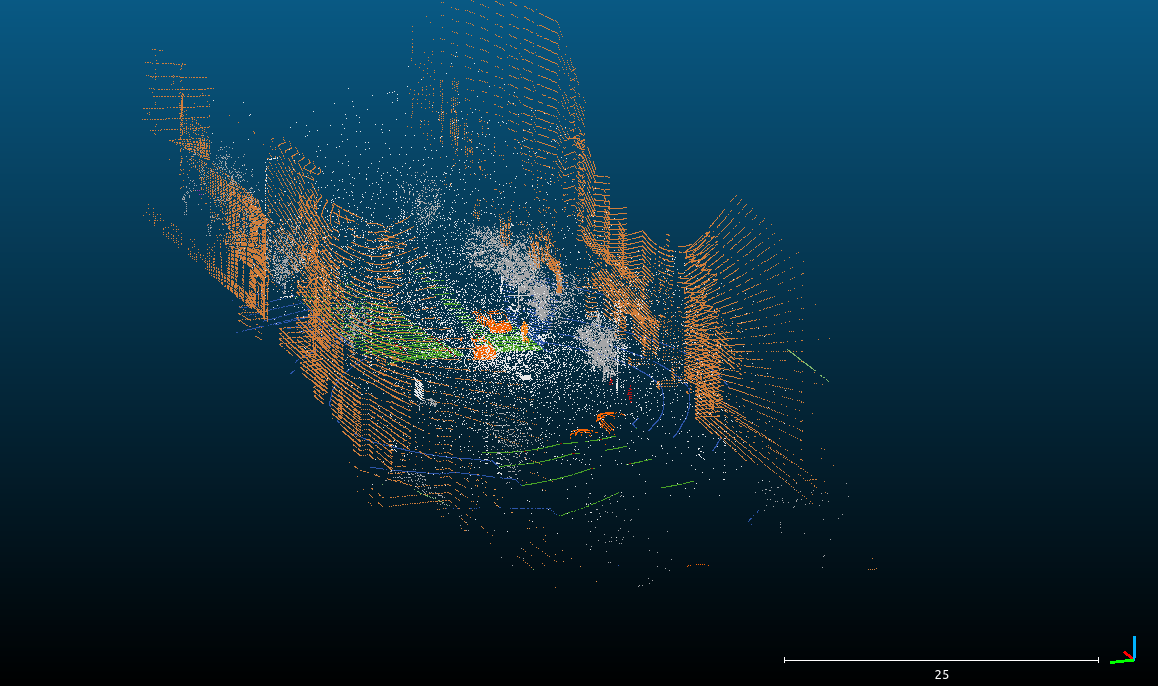 图3:雪天aiSim5激光雷达点云(2L)图2:晴天aiSim5激光雷达点云(2L)
图3:雪天aiSim5激光雷达点云(2L)图2:晴天aiSim5激光雷达点云(2L)二、与不同材料的相互作用
aiSim的基于物理的LiDAR模型还会和不同的材料具有相互作用,与Filament相似,能够提供高度真实和准确的光线与材质交互模拟结果。
考虑到不同材料的反射率(反照率)不同,许多材料的反照率数据并不都是在905nm波长下测量的,因此aiSim将反照率值基于pbrt-v3模型转换成720nm的波长,接近于905nm。
对于安全交通标识和和车道线等具有回归反射(Retro-Reflective)特性的材料来说,能够将辐射能量绝大部分直接反射回接收器。当LiDAR的光束击中这类表面时,信号损失非常小。
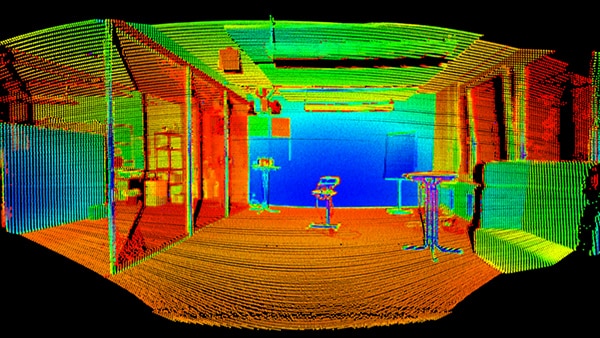
因此,在aiSim的LiDAR传感器输出的点云强度中,强度值[0-100]之间为Lambertian(朗伯)值,而[101-255]则代表回归反射的目标。如图:当值大于100时,车道显示为红色。
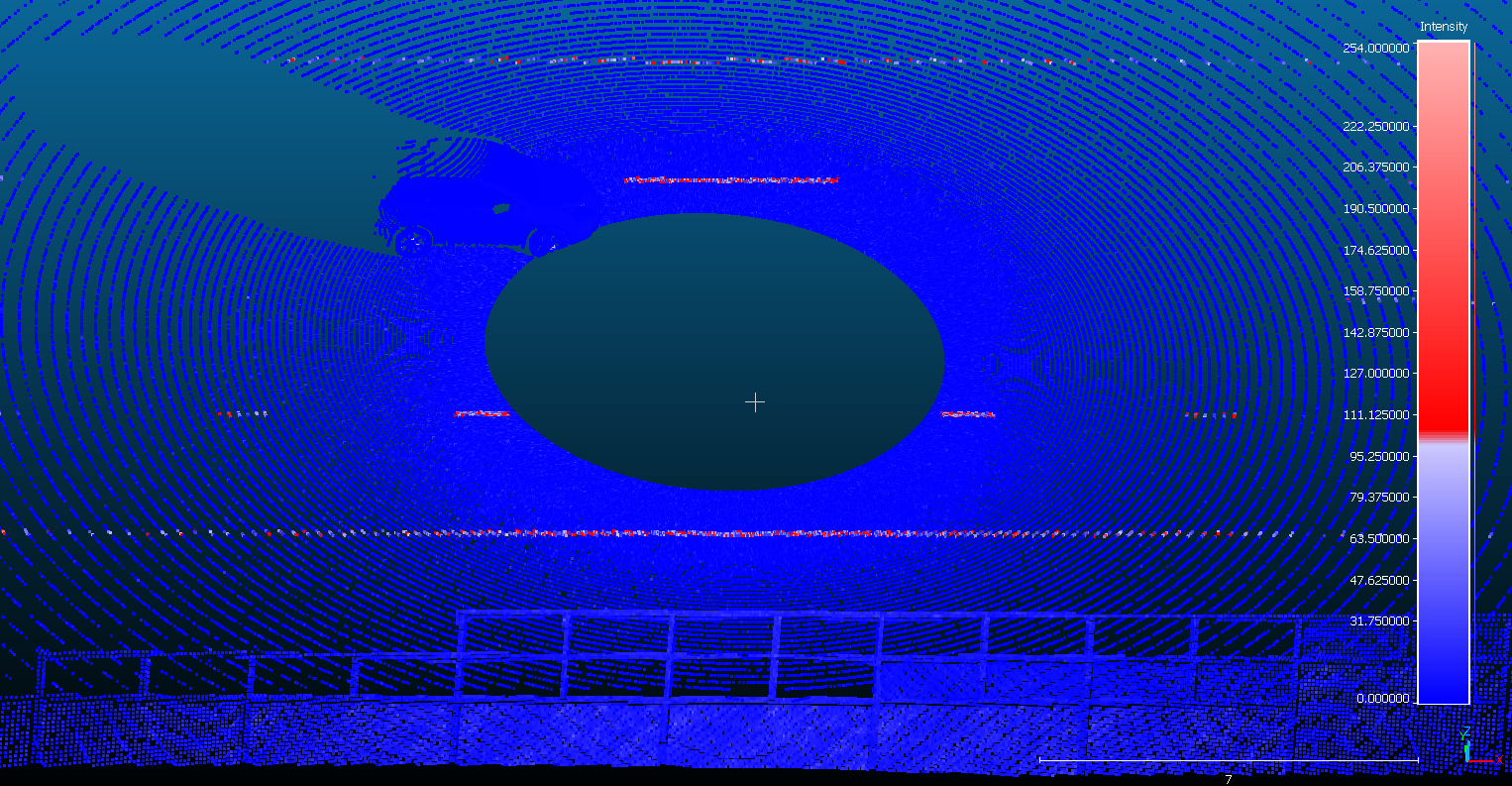 图4:点云强度值
图4:点云强度值同时,aiSim也提供了丰富的材料库,对于大多数3D数字资源来说,可以通过aiSim提供的回归反射材料,将其附着在3D模型上来实现逆反射的效果。除逆反射外,aiSim也提供BRDF材料蒙版,即基于双向反射分布函数的反射材料,让不同的3D模型就有不同程度的回归反射特性,在不同区域上实现实现不同的光学行为。
由于在大多数图像处理系统中,红色通道是最容易区分和处理的通道,因此aiSim在红色通道表示回归反射的特性,将[0-255]划分成不同的部分来表示:
[0-15]:基础反射,表示材料的基础反射性,即漫反射特性,遵循朗伯特定律,适用于大多数普通表面,如墙壁等。
[16-32]:回归反射,表示材料具有逆反射特性,允许光线沿着接近入射角度相反方向反射回去,适用于交通标志,施工标志,车道线等。
[32-64]:清漆(透明)层,表示材料物体的材质将会模拟出光滑有光泽的表面,通常应用于在汽车表面,塑料制品等具有透明保护层的3D模型。
三、实际应用
在实际应用中,通过场景重建可以比对验证aiSim中LiDAR模型的置信度:
1、高速公路场景点云
红色点云为aiSim仿真场景中LiDAR输出结果,绿色点云为真实世界中LiDAR点云数据,仿真点云的总体形状与真实数据非常接近。
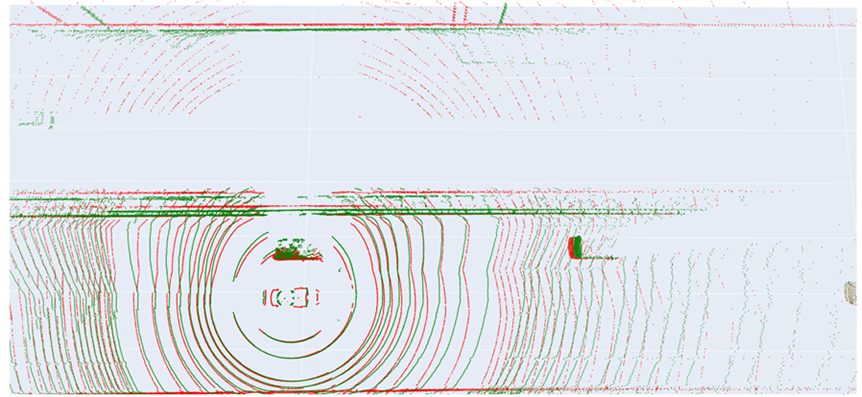 图5:高速场景对比1
图5:高速场景对比1 图6:高速场景对比2
图6:高速场景对比22、点云细节对比
- 在同一车道中,远距离外部车辆的点云数据与实际情况非常接近。
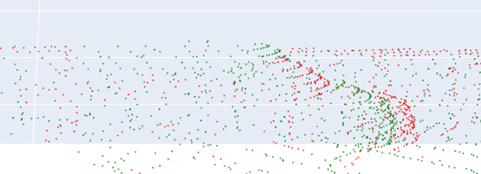 图7:同车道远端车辆点云对比
图7:同车道远端车辆点云对比当然,在一些场景下,真实的激光雷达(绿色)激光束穿透玻璃表面的比例高于仿真(红色)的结果。
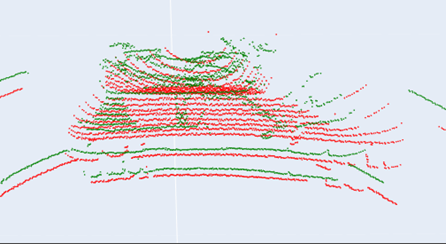 图8:玻璃材质穿透对比
图8:玻璃材质穿透对比以上就是验证aiSim激光雷达LiDAR模型的验证方法。
作者介绍
崔工
康谋科技仿真测试业务技术主管,拥有超过5年的汽车仿真测试及自动驾驶技术研发经验,熟练掌握仿真测试工具和平台,如aiSim、HEEX等,能有效评估和优化自动驾驶系统的性能和安全性。拥有出色的跨文化沟通能力,成功带领团队完成多项海外技术合作项目,加速了公司在自动驾驶技术上的国际化进程。作为技术团队的核心,领导并实施过大规模的自动驾驶仿真测试项目,对于车辆行为建模、环境模拟以及故障诊断具有独到见解。擅长运用大数据分析和人工智能技术,优化仿真测试流程,提高测试效率和结果的准确性。
-
AD
+关注
关注
28文章
879浏览量
155388 -
adas
+关注
关注
311文章
2344浏览量
212151 -
激光雷达
+关注
关注
982文章
4560浏览量
197196 -
自动驾驶
+关注
关注
795文章
15012浏览量
181720
发布评论请先 登录
【地平线征程 5 域控试用】激光雷达数据获取与 BPU 推理实现
激光雷达LiDAR技术的工作原理和应用场景

软件在环(SIL)测试方案及康谋aiSim实现路径

固态激光雷达参数以及避障视频
禾赛科技位列全球激光雷达行业专利第一

如何为自动驾驶汽车选择一款合适的激光雷达?

长城汽车欧拉5搭载禾赛科技激光雷达开启预售
康谋 aiSim 携经纬恒润焕新 HIL 测试,诚邀集成商共建生态!

自动驾驶里的激光雷达有何作用?

自动驾驶激光雷达可以安装在哪些位置?

全固态激光雷达为什么迟迟未来?其技术难点是什么?
超酷的树莓派激光雷达扫描仪!

了解驱动器、开关和激光二极管在实现有效激光雷达性能方面的作用
康谋分享 | 自动驾驶仿真进入“标准时代”:aiSim全面对接ASAM OpenX




评论