 Aigtek:介电弹性体高压放大器在软体机器人研究中的应用
Aigtek:介电弹性体高压放大器在软体机器人研究中的应用
近年来软体机器人的研究成为目前机器人研究领域的热点,由于软体材料的自由度可以根据需求自由变化,因此软体机器人有着极高的灵活性,而且软体机器人因其材料的柔软性有着很好的人机交互性能和安全性。它的出现成功解决了传统的刚性机器人人机交互性不足,适用范围窄的问题。今天Aigtek安泰电子将就介电弹性体高压放大器在软体机器人研究中的应用进行介绍。
同时软体机器人还可以完成一些非规律型的工作,这一点传统的刚性机器人是无论如何也无法做到的。软体机器人在医疗领域,军事领域,救灾救援领域,生物医药领域以及家庭服务领域有着广阔的应用前景。
软体机器人,顾名思义其构成材料必然是柔软的。正是得益于其柔软的材料,软体机器人才能拥有极高的自由度和良好的人机交互性。除了柔软性,软体机器人的制造材料还应该具有良好的可塑性和较高的弹性。

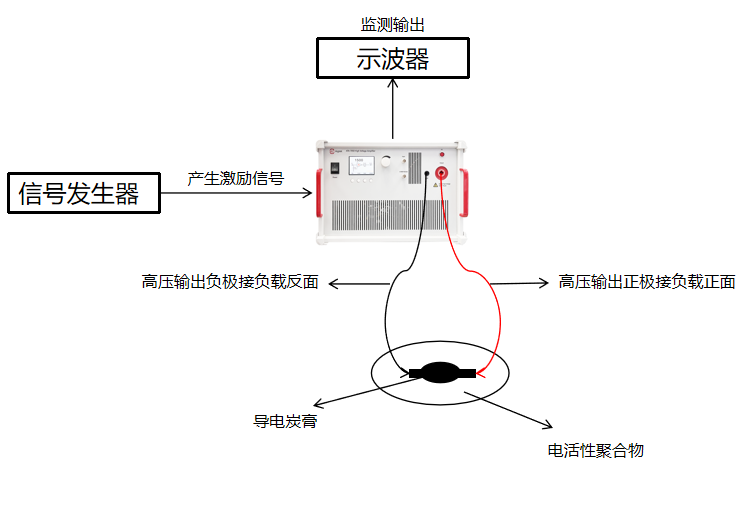
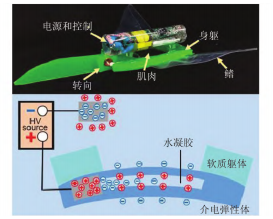
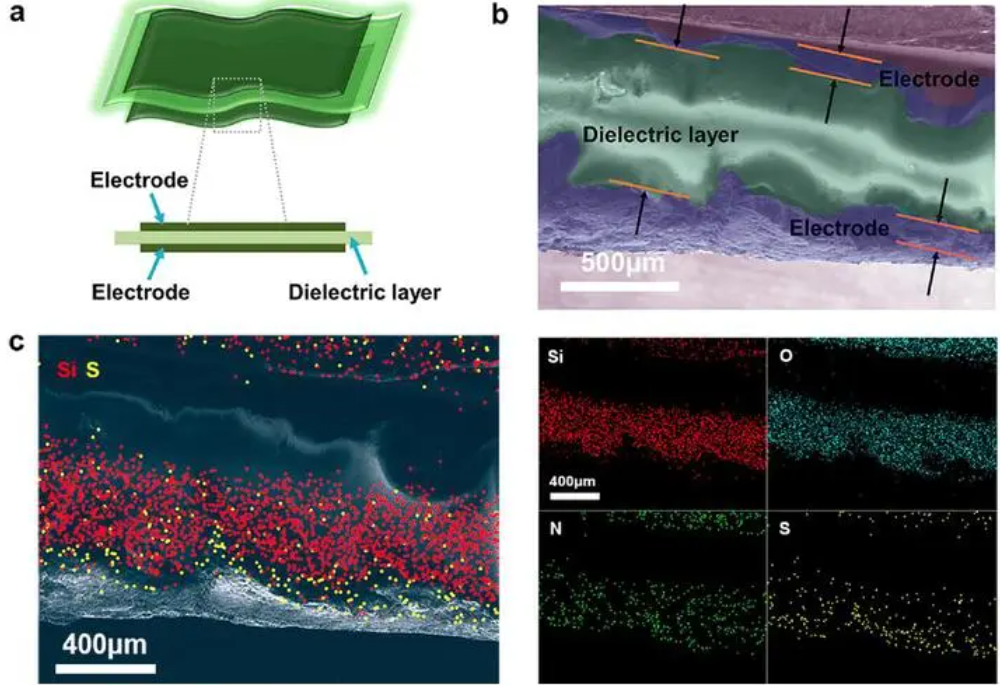
而在软体机器人制造过程中,其中最为重要的部分之一就是高压放大器。介电弹性体(DE)是一种在外界电压激励下能够产生大变形的新型电活性聚合物(EAP)材料。DE材料作为驱动器通常呈三明治结构。对DE材料上下表面的柔性电极通过高压放大器施加电压,在电场的作用下,DE材料的上下表面会积累正负电荷,在电场力的作用下,DE薄膜会产生厚度方向上的压缩和平面方向上的扩张变形,当外力或电压撤销之后,DE材料会恢复至原形,在这个过程中DE材料实现电能到机械能的转化,DE材料因其具有大变形、响应速度快、能量密度高、质轻价廉等特点,在软体机器人制造中有广泛应用。所以对于DE材料的研究有着重要意义。
ATA-7000系列高压放大器常被应用在DE材料研究中,ATA-7000系列高压放大器最大输出电压20kVp-p(±10kVp),带宽(-3dB)DC~100kHz,最大输出电流40mAp,满足不同柔性电极电压的需求。
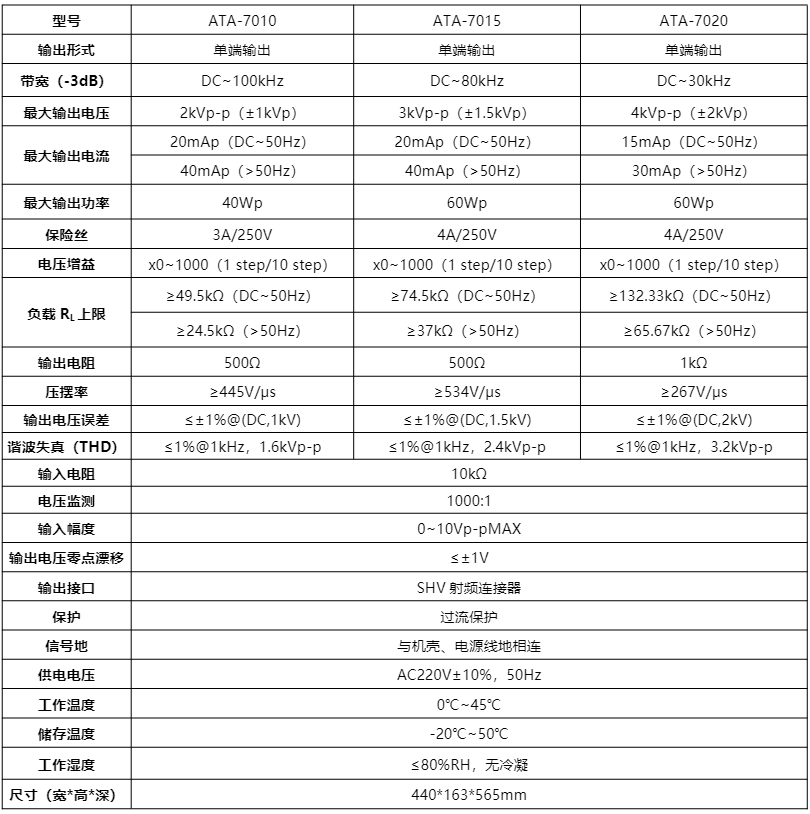
ATA-7000系列高压放大器,推出用于工业和研究应用。全固态高压绝缘设计,可实现高转换速率,宽带宽和低噪声工作。四象限有源输出在整个输出电压范围内将电流吸收或输出到电抗性或电阻性负载中。

最大输出电压20kVp-p(±10kVp)
带宽(-3dB)DC~100kHz
最大输出电流40mAp
驱动高压型负载
西安安泰电子是专业从事功率放大器、高压放大器、功率放大器模块、功率信号源、射频功率放大器、前置微小信号放大器、高精度电压源、高精度电流源等电子测量仪器研发、生产和销售的高科技企业,为用户提供具有竞争力的测试方案。
审核编辑 黄宇
-
机器人
+关注
关注
211文章
28762浏览量
208981 -
高压放大器
+关注
关注
4文章
520浏览量
14443
发布评论请先 登录
相关推荐
高压放大器在水下扑翼软体机器人研究中的应用

高压放大器在软体机器人特性测试中的应用

安泰功率放大器在介电材料电子皮肤研究中的应用
安泰ATA-7000系列高压放大器在介电弹性体驱动实验中的应用
高压放大器在介电弹性体折纸术软体机器人中的应用


安泰ATA-7015高压放大器在机器人测试中的应用研究


Aigtek高压放大器在柔性爬行机器人驱动性能研究中的应用








 工商网监
工商网监
评论