 DBC文件结构深度解析
DBC文件结构深度解析
Bit_timing 波特率定义,必须部分,但通常为空nodes 定义网络节点messages 定义消息和信号
2. 关键字
VERSION 版本
VERSION:
NS_ 为new symbol的缩写,后面紧跟着一堆ns,一般是创建dbc时自动生成,不用太关心
NS_:
BS_ 定义CAN网络的波特率
BS_: [baudrate:BTR1,BTR2]
BU_ 网络节点
BU_: Nodename1 Nodename2 Nodename3 ……
BO_ 报文
BO_: message_id message_name : message_size transmitter {signal}
SG_ 信号
SG_: signal_name multiplexer_indicator : start_bit | signal_size @ byte_order value_type ( factor , offset ) [ minimum | maximum ] unit receiver {, receiver}
CM_ 对报文/信号的注解
CM_: Object MessageId/NodeName “Comment”
BA_DEF_ 对报文/信号/节点等的属性定义
BA_DEF: _ Object AttributeName ValueType Min Max;
BA_DEF_ DEF_ 对报文/信号/节点等的属性初始值定义
BA_DEF_DEF_: AttributeName DefaultValue;
BA_ 对报文/信号/节点等的属性设置值定义
BA_: AttributeName projectValue
VAL_ 数值表定义
VAL_: MessageId SignalName N “DefineN” …… 0 “Define0”
VAL_TABLE_ 全局信号值表,用来对信号值解码
VAL_TABLE_: name value “value_description” …0 “value_description”
EV_ 环境变量
EV_:
3.本文出现的符号
‘ | ’ ——可选择
‘ ; ’——结束定义
[。..]——内容可选(0或1次)
{。..}——内容重复(0或多次)
(。..)——注释
unsigned_integer:无符号整型
signed_integer:有符号整型
double:双精度小数
char_string:字符串
C_identifier:C语言变量命名
4. 波特率的结构(BS_)
BS_: [baudrate:BTR1,BTR2];
其中BS_为关键字,用于定义CAN网络的波特率;[ ]内容表示为可选部分,可以省略(如下图例子中即把该部分省略了);但关键字”BS_:”必须存在,省略则会出错。《DBC File Format Document》规范中明确提醒,必须保留BS_: 标签。

5. 网络节点的结构(BU_)
BU_: Nodename1 Nodename2 Nodename3 ……
解释:
BU_ 为关键字,表示网络节点
Nodename1、Nodename2 网络节点名字,由用户自己定义;
注意事项:需要保证节点命名的唯一性
如示例中的BU_: VCU_Vehicle_Control_Unit MotorCtrol SCU PC Vector__XXX :
表示定义了:
VCU_Vehicle_Control_Unit
MotorCtrol
SCU
PC
Vector__XXX这五个网络节点
其中:标识为Vector__XXX时表示未指明具体节点

6. 消息的结构(BO_)
BO_ message_id message_name : message_size transmitter {signal}
BO_ 306YRS2: 8 FVCM
解释:
BO_ 为关键字,表示报文;
MessageId 报文ID,是以10进制数表示的;
(如例子中的996,代表报文ID为0x3E4,是longlong类型,也就是CAN ID的值;)
MessageName 报文的名字,命名规则和C语言变量相同;
MessageSize 报文数据域字节数,为无符号整型数据,CAN 2.0为最大8字节,CAN FD 最大64字节;
Transmitter 该报文的网络节点;如果该报文没有指定发送节点,则该值需设置为” Vector__XXX”。
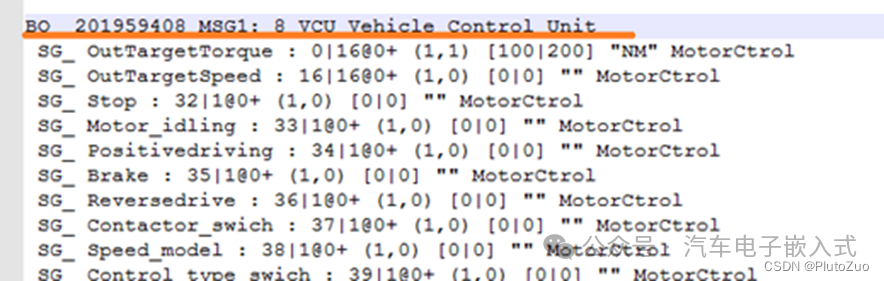
如示例中的BO_ 201959408 MSG1: 8 VCU_Vehicle_Control_Unit
报文ID:201959408(0xC09A7F0)
报文名:MSG1
分隔符 : “:”
报文长度:8字节
报文发送者:VCU_Vehicle_Control_Unit
(由VCU_Vehicle_Control_Unit这个节点发出的,数据域长度为8字节,ID为201959408(0xC09A7F0),名字命名为MSG1的报文)
7. 信号的结构(SG_)
SG_ signal_namemultiplexer_indicator : start_bit | signal_size @ byte_order value_type ( factor , offset ) [ minimum | maximum ] unit receiver {, receiver}
SG_ YRS2_Checksum : 7|8@0+ (1,0) [0|255] “bit” FRS
SG_ YRS_LongitSensorState : 15|2@0+ (1,0) [0|3] “bit” FRS
SG_ YRS_LongitAcce : 23|16@0+ (0.001,-2) [-2|2] “g” FRS
SG_ YRS_AliveCounter : 59|4@0+ (1,0) [0|15] “bit” FRS
解释:
SG_ 为关键字,表示信号;
SignalName(SigTypeDefinition) : 表示该信号的名字 和 多路选择信号的定义;
SigTypeDefinition是可选项,有3种格式:
a)空,表示普通信号。
b)M,表示多路选择器信号。
c)m50,表示被多路选择器选择的信号,50,表示当M定义的信号的值等于50的时候,该报文使用此通路。
StartBit、 SignalSize 表示该信号起始位、信号长度;
ByteOrder 表示信号的字节顺序:0代表Motorola格式,1代表Inter格式;
ValueType 表示该信号的数值类型:+表示无符号数,-表示有符号数;
Factor,Offset 表示因子,偏移量;这两个值用于信号的原始值与物理值之间的转换。
转换如下:物理值=原始值*因子+偏移量;
Min|Max 表示该信号的最小值和最大值,即指定了该信号值的范围;这两个值为double类型;
Unit 表示该信号的物理单位,为字符串类型;
Receiver 表示该信号的接收节点;若该信号没有指定的接收节点,则必须设置为” Vector__XXX”。
如示下面的例中:
第一个信号 :
SG_ S_Check : 45|10@0+ (0.00625,0) [0|160] “M” EL3160_60,ESC
表示定义了一个命名为 S_Check的普通信号,其起始位是第45位,信号长度10 bit;
信号是Motorola格式,数值类型为无符号类型数;因子为0.00625,偏移量为0;信号取值范围为0到160;
信号物理单位为字符串”M”;该信号接收节点为EL3160_60,ESC这两个节点。
、
第二个信号:
SG_ Send_Mux M : 7|8@0+ (1,0) [0|0] “” EL3160_60,ESC
表示定义了一个命名为 Send_Mux的多路选择器信号,其起始位是第7位,信号长度8 bit;
信号是Motorola格式,数值类型为无符号类型数;因子为1,偏移量为0;信号取值范围为0到0;
信号物理单位为字符串””;该信号接收节点为EL3160_60,ESC这两个节点。
该信号做选择通道使用。
第三个信号:
SG_ S_Level_A_Voltage m50 : 15|16@0+ (0.00625,0) [0|160] “V” EL3160_60,ESC
表示定义了一个命名为S_Level_A_Voltage的被选择信号,其起始位是第15位,信号长度16 bit;
信号是Motorola格式,数值类型为无符号类型数;因子为0.00625,偏移量为0;信号取值范围为0到160;
信号物理单位为字符串”V”;该信号接收节点为EL3160_60,ESC这两个节点。
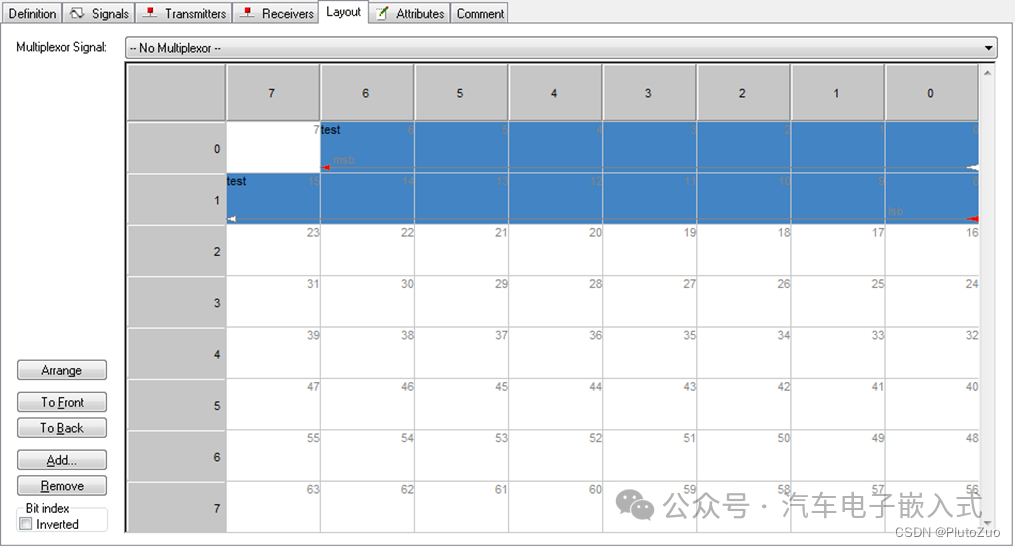
其中byte_order分为motorola和intel两种格式,motorola对应0,intel对应1。这两种格式是区别如下:
如果在同一个字节内,则没有区别,如果跨越多个字节则有区别,motorola格式是高位(msb)在低字节(说明:CAN消息的字节排列Byte0 Byte1 … Byte7,Byte0是低字节),intel格式是高位(msb)在高字节。
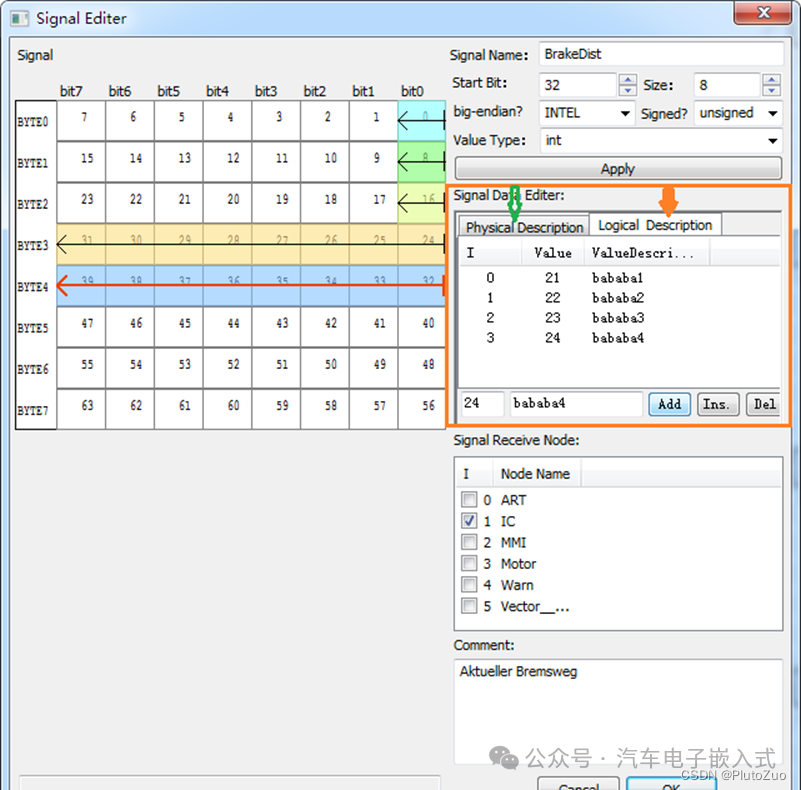
Intel格式
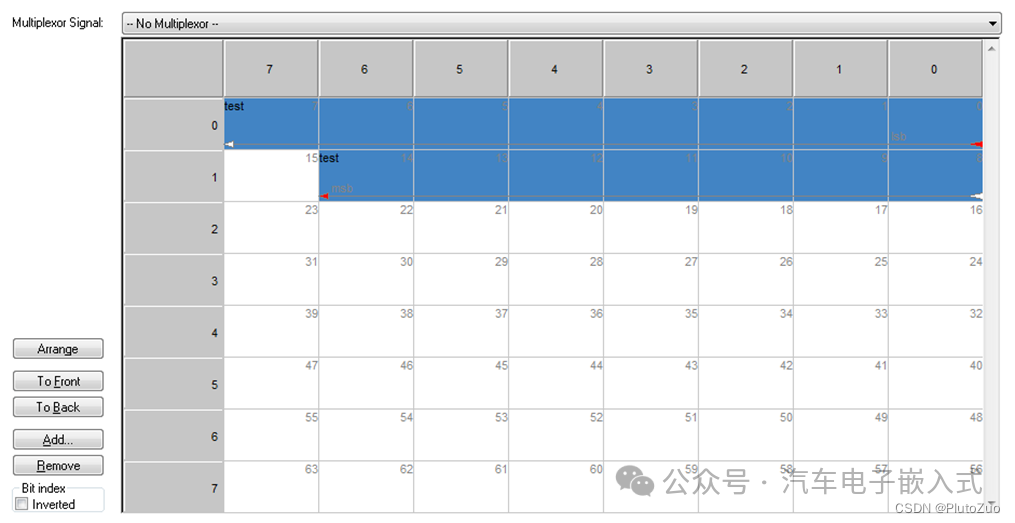
第一字节的bit0对应的是lsb(第一行的红色箭头),第二字节的bit14对应的是msb(第二行的红色箭头)。起始bit是lsb对应的bit0。
Motorola格式
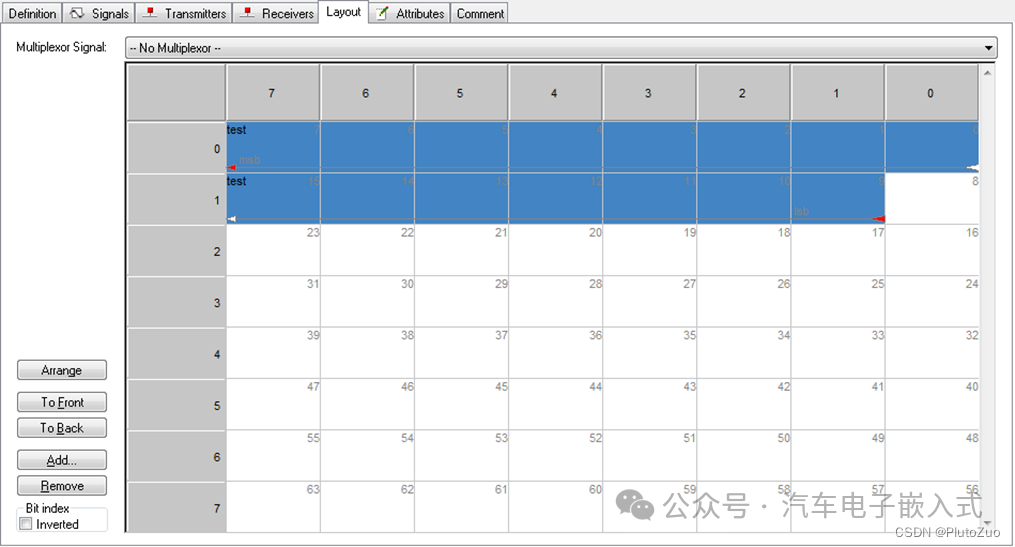
第二字节的bit9对应的是lsb(第二行的红色箭头),第一字节的bit7对应的是msb(第一行的红色箭头)。起始bit是lsb对应的bit9。当然也可以修改起始位置,例如将起始位置改为bit8,如下图:
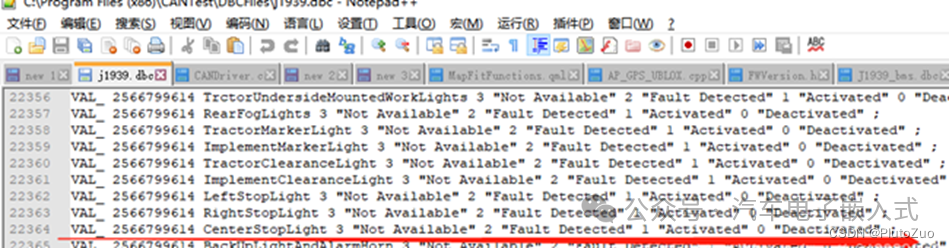
55~58行定义的是信号的选项值,其结构如下:‘VAL_’ message_id signal_name { value_description } ‘;’
注意,行结尾有一个分号。其中value_description的定义如下:value_description = double char_string ;
以上是需要解析的部分,注意字符部分都限制在32字节内,不太方便。
8. 注解的结构(CM_)
CM_ Object MessageId/NodeName “Comment”
解释:
CM_ 为关键字,表示注解信息;
Object 表示进行注解的对象类型,可以是节点“BU_”、报文“BO_”、消息”SG_”;
MessageId/NodeName 表示进行注解的对象,若前面的对象类型是信号或者报文,则这里的值应为报文的ID(10进制数表示);若前面的对象类型为节点,则这里的值应为节点的名字;
Comment 表示进行注解的文本信息;
如示例中的 CM_ SG_ 996 HUD_HeightLv “Control hud height level”;
表示对ID为996(0x3E4)这条报文下的名为”HUD_HeightLv ”的信号进行注解说明,说明的内容为“Control hud height level”。
又如 CM_ BU_ HUD “Head Up Display“;表示对HUD这个节点进行注解说明,说明的内容为” Head Up Display “。
注释以 “” 包围,注释内部不允许出现“号。
9. 特征(属性)的结构(BA_DEF_ BA_DEF_DEF_ BA_)
和特征相关的Tag一共有三条:
9.1 报文/信号/节点等的属性定义(BA_DEF_)
特征名称类型定义。格式如下:
BA_DEF_ ObjectAttributeNameValueTypeMin Max;
解释:
BA_DEF 标签
Object 特征类型,可以是BU_(节点特征定义)、BO_(报文特征定义)、SG_(信号特征定义)、空格(项目特征定义);
AttributeName 特征名称(C语言变量格式)
ValueType 特征值类型(只能是十进制、十六进制、浮点数、枚举、字符5种类型)
Min Max 数值类型这里出现范围,枚举类型这里是枚举值,字符类型,这里是空。
9.2 报文/信号/节点等的属性初始值定义(BA_DEF_DEF_) 特征默认值定义。格式如下:
BA_DEF_DEF_ AttributeNameDefaultValue;
解释:
BA_DEF_DEF_ 标签
AttributeName 特征名称(C语言变量格式)
DefaultValue 该特征的默认设置值
9.3 报文/信号/节点等的属性设置值定义(BA_)特征项目设置值定义,格式如下:
BA_ AttributeName projectValue;
解释:
BA_ 标签
AttributeName 特征名称(C语言变量格式)
projectValue 该特征的设置值
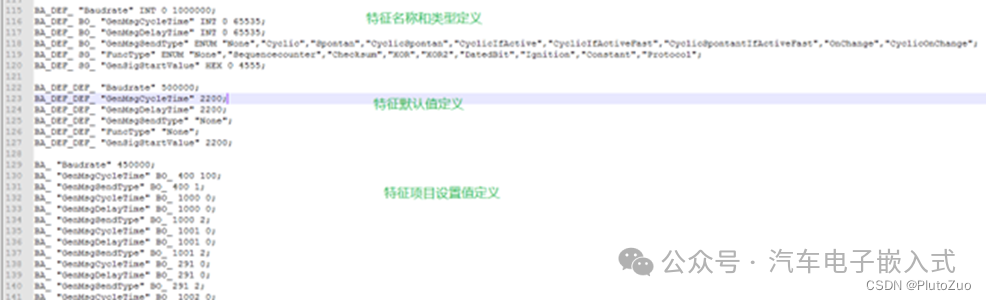
举例:
BA_DEF_ BO_ “GenMsgCycleTime” INT 0 65535;
BA_DEF_DEF_ “GenMsgCycleTime” 2200;
BA_ “GenMsgCycleTime” BO_ 400 100;
表示对定义了一个针对消息类型的特征,特征名为”GenMsgCycleTime”,特征值是整型数据,取值范围在0到65535之间;
默认值为2200;
项目设置值 CAN ID ==400的消息的该特征值设置为100
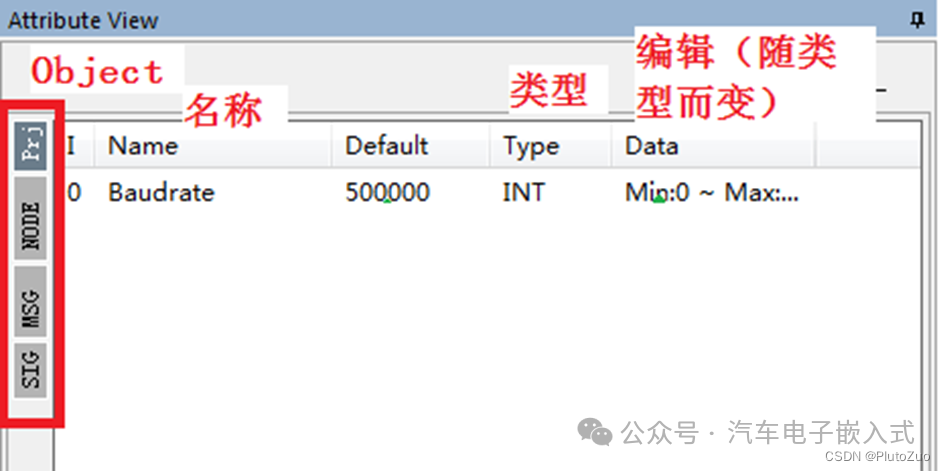
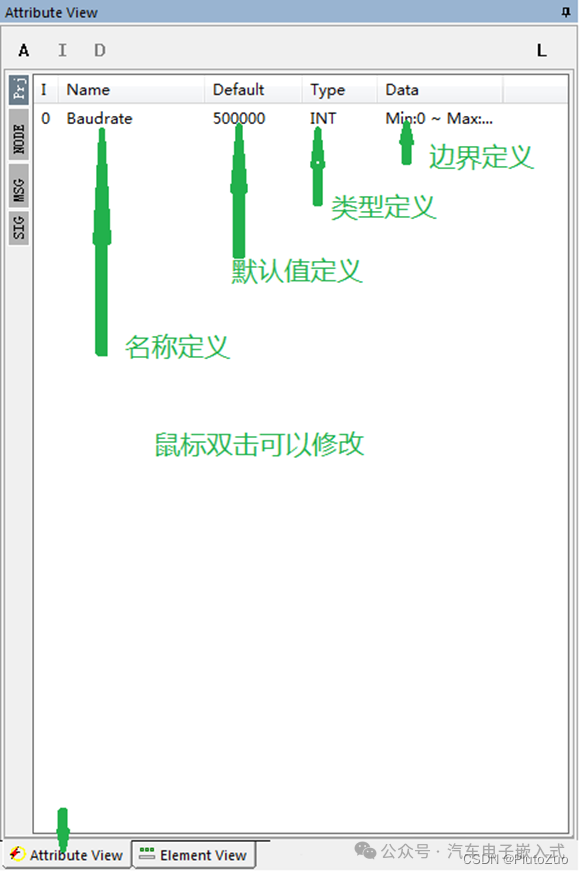
在DBCView4.3里面是把BA_DEF_ 和 BA_DEF_DEF_合并在一起了,用了特征视图来管理,如下图。
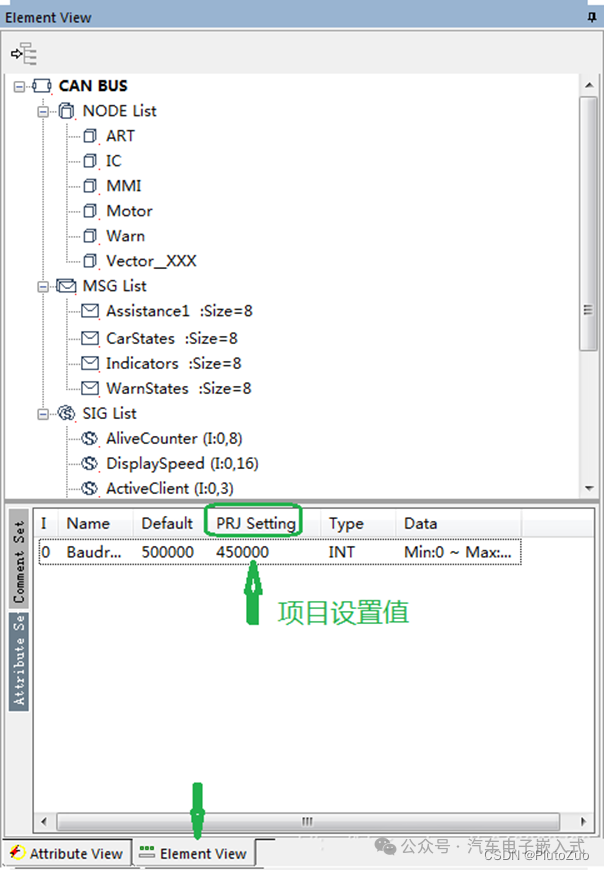
然后把 特征项目设置值定义 BA_ AttributeName projectValue; 和元素合并在一起了。
10. 数值表的结构(VAL_)格式如下:
VAL_ MessageId SignalName N “DefineN” …… 0 “Define0”;
解释:
VAL_ 为关键字,表示数值表定义;
MessageId 表示该信号所属的报文ID(10进制数表示);
SignalName 表示信号名;
N “DefineN” …… 0 “Define0” 表示定义的数值表内容,即该信号的有效值分别用什么符号表示 。
如示例中的 VAL_ 996 HUD_OffSt 1 “Active” 0 “Not Active”;
表示对ID为996(0x3E4)的这条报文下的,一个命名为”HUD_OffSt”的信号,进行其数值表的定义;
用”Active”取代1;用”Not Active”取代0。只有自然数类型的信号才可以使用数值表表示。
信号的值的表示方法有两种:
1) 物理值=原始值*因子+偏移量;(常规表示,前面有提到)
2) 数字表,用来表示逻辑值;
11. 全局信号值表(用来对信号值解码)的结构(VAL_TABLE_) 格式如下:
VAL_TABLE_ value_table_namevalue_table_value “value_description” … 0 “value_description”;
描述:
a)一个value table中以“空格”分隔;
b)value_table_name表示value table的名称, 命名必须满足“符号字符串”要求;
c) value_table_value表示value table的值,十进制表示;
d) value_description表示value table的值描述;
e)当一个value table存在多个值描述时,以(value_table_value “value_description”)的形式接着追加,value table内的两个值描述以“空格”分隔;
f)完成一个value table定义,需以“分号;”结尾;
g)多个value table需要换行。
VAL_TABLE_ ESC_QDCFRS 1 ”ERROR“ 0 ”NO_ERROR“ ;
VAL_TABLE_ ESC_BrakeTempTooHigh 1 ”ABNORMAL“ 0 ”NORMAL“ ;
VAL_TABLE_ ESC_DTC_Active 1 ”ACTIVE“ 0 ”INACTIVE“ ;
VAL_TABLE_ ESC_Vehiclestandstill 3 ”RESERVED“ 2 ”INVALID“ 1 ”STANDSTILL“ 0 ”NOT_STANDSTILL“ ;
审核编辑:黄飞
-
DBC
+关注
关注
2文章
55浏览量
7777
原文标题:DBC的结构详细分析
文章出处:【微信号:eng2mot,微信公众号:汽车ECU开发】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
关于CANdb++ Editor编写DBC文件时Factor的设置问题求解
labview加载DBC文件错误
CAN报文解析需要知道DBC的哪些信息排序方式
使用candb++制作dbc文件笔记
【产品应用】如何通过IoT云平台对CAN数据进行实时DBC解析?
CAN DBC文件解析

TSMaster如何同时记录标定变量和DBC信号至BLF文件

CAN底层报文抓到了,却不知怎么解析?以及如何看到信号运行状态?






 工商网监
工商网监
评论