 基于ZU5EV的立体视觉+惯导SLAM导航套件
基于ZU5EV的立体视觉+惯导SLAM导航套件
|
便携式HD-SDI模拟源测试设备 一、平台简介 便携式手提CameraLink模拟源测试设备,以PCIe的HD-SDI播出卡和X86主板为基础,构建便携式的手提设备。 平台默认操作系统为win7 64位系统;具备丰富的外设接口,如VGA、HDMI、千兆网口、USB2.0/3.0以及方便的JTAG调试口;平台存储为8G内存、256G固态硬盘,具备高速数据读写能力,可满足大多数应用场景。屏幕为触摸显示屏。 FPGA HD-SDI播出卡是以Kintex-7XC7K325T PCIeX4的HD-SDI数据输出卡,支持HD-SDI的数据格式定制和图片生成的定制设计。   二 机箱主板配置详细说明: 一、机箱 材料 铝合金内部个别承重件为镀锌板 表面工艺 整体氧化外表面喷粉(军绿色) 尺寸 270x110x200(mm)(W×H×D) 整机重量 供电 +12V 散热方式 风冷散热 二、触摸屏 规格 10.1寸液晶电容触摸屏 三、主板 外设接口 VGA, HDMI, LVDS/EDP 支持同步/异步双显功能;6个USB(其中1 个USB3.0,2个板载插针);6COM RS-232, COM3 可设置成RS485;双Intel PCI-E总线千兆网卡;1 个MINI PCIE 扩展, 1 个PCIE x4 扩展 电源 DC 12V输入 处理器 Intel®Core™第七代Kaby lake-U Soc i3/i5/i7 处理器(目前为i3) 操作系统 支持windows 8;Windows 7等(预装Windows7系统) 内存 1个笔记本内存插槽,支持DDR3/L 1066/1333/1600MHz 最大至8GB(预装8G内存条);1×SATA 3.0,1×mSATA2.0固态硬盘接口(预装三星msata512G SSD硬盘:读:510MB/s,写:393MB/s) 工作温度 -15~60℃ 存储温度 -40~75℃ 环境湿度 0~90% 空气湿度,无冷凝 防尘防水 独特的前面板设计,使整机结构坚固可靠,美观时尚。能符合绝大多数应用环境的防尘防水要求。 WIFI无线网络 该系列平板电脑可以外接WIFI无线网卡或者网线连接 其他 可安装打印机、办公软件、媒体播放器等 产品定制 可根据需求定制 三、内部集成HD-SDI输出板卡   板卡特征 支持1路 HD-SDI 3Gsps输出,支持视频格式1080P,60fs,如下: 输出分辨率 640480@60, 640480@75, 800600@50, 800600@60, 800600@75, 1024x768@50, 1024x768@60, 1024x768@75, 1280768@50, 1280768@60, 1280800@60, 12801024@50, 12801024@60, 12801024@75, 1360768@60,1366x768@50, 1366x768@60, 14001050@50, 14001050@60, 1600900@60, 16001200@50, 16001200@60, 16801050@60, 19201200@60, 480i60, 480p60, 576i50, 576p50, 720p50, 720p59.94, 720p60, 1080p23.976, 1080p24, 1080p25, 1080p29.97, 1080p30, 1080p50, 1080p59.94, 1080p60, 2K50, 2K60. ●支持PCIeX4; ●支持FPGA的数据格式定制,基于GTP Aurora,可任意图像格式。 ●支持非DDR缓存的低延时输出; ●支持复合视频输出; ●科学研究的伴侣。 三 模拟源软件 1、1080P 50HZ 实时显示 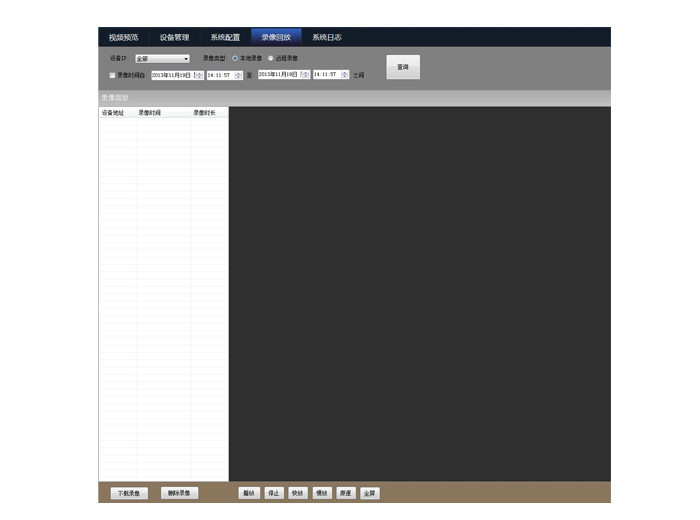 2、基本图像生成。包括灰度处理、灰度直方图、灰度均衡、梯度锐化、均值滤波、中值滤波、边窗滤波、心态学滤波等。 灰度处理: 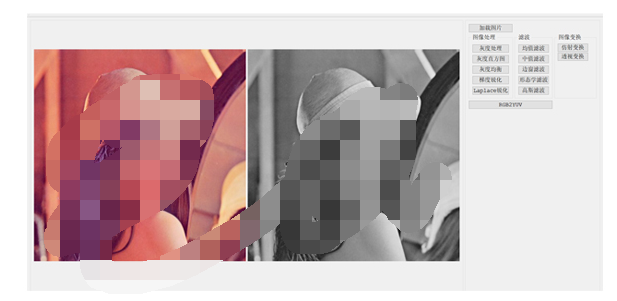 边窗滤波:  形态学滤波:  人脸识别:   |
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
人脸识别
+关注
关注
76文章
4012浏览量
81881
发布评论请先 登录
相关推荐
利用VLM和MLLMs实现SLAM语义增强
语义同步定位与建图(SLAM)系统在对邻近的语义相似物体进行建图时面临困境,特别是在复杂的室内环境中。本文提出了一种面向对象SLAM的语义增强(SEO-SLAM)的新型SLAM系统,借

AGV激光导航定位技术与构建地图
AGV是制造物流重要设备,激光导航AGV高可靠灵活,SLAM技术关键,激光SLAM成熟且落地丰富,无需人工标志物,复合式激光导航兼顾可靠性与灵活性,激光

现代海上的电子指南针——舰艇惯导系统
舰艇惯导系统通过惯性测量装置获取舰艇运动参数,实现自主、连续、隐蔽的导航,提供航向、速度等关键信息。未来趋势包括高精度化、多传感器融合和自主导航能力提升,为船舶航行带来更多便利和安全。

图像信号处理板设计原理图:531-基于3U PXIe 的ZU7EV的通用主控板
ZU7EV板卡 , 雷达信号处理 , 视觉处理卡 , 3U PXIe , 图像信号分析
立体视觉新手必看:英特尔® 实感™ D421深度相机模组
入门级立体深度模组,旨在以高性价比将先进的深度感应技术带给更广泛的用户群体,为寻求深度成像技术及消费产品潜力的开发者、研究人员和计算机视觉专家提供卓越的价值,将先进的3D视觉技术拓展至更广泛的应用领域。 英特尔® 实感™ 深度相
机器人高效导航定位背后SLAM专用芯片的崛起
电子发烧友网报道(文/李宁远)对移动机器人来说,导航定位是最基本最核心的功能之一,机器人自主移动能力建立在出色的导航定位基础上。目前移动机器人应用得最广泛的导航定位技术无疑是SLAM技
新品 | Bumblebee X系列用于高精度机器人应用的新型立体视觉产品
TeledyneFLIRIIS推出一款用于高精度机器人应用的新型立体视觉产品BumblebeeX系列。BumblebeeX产品图BumblebeeX系列,一个基于一流立体视觉产品组合的

导远科技首次公开展示其自主研发的新一代MEMS惯导芯片
4月25日,导远科技在北京国际汽车博览会首次公开展示其自主研发的新一代MEMS惯导芯片,据悉该款MEMS芯片已流片成功,即将进入量产。

【LicheeRV-Nano开发套件试用连载体验】+ 实现三麦克纳姆轮小车自主导航
报告),目前产品功耗及体积太大,个人希望将此产品轻量化,LicheeRV-Nano开发套件一个很好的契机,我希望可以通过该开发板继续实现剩余的项目功能(路径自主规划,slam导航等),同时兼顾了轻量化的需求
发表于 03-03 14:20
总投资1.5亿!苏州清研微视立体视觉传感器项目落户安徽芜湖
2月1日,清研年产3万台立体视觉传感器项目签约落户安徽芜湖三山经济开发区。项目计划总投资15000万元,建设年产3万台立体视觉传感器(产业创新融合产品)。该项目的落地加强了三山经开区与清华大学未来在

GNSS模块的惯导技术:引领定位科技的前沿
全球导航卫星系统(GNSS)模块的惯导技术是一项颇具前瞻性的科技,它结合了全球定位系统和惯性导航技术,为各个领域的定位需求提供了更为精准和可靠的解决方案。本文将深入探讨GNSS模块的
三维视觉测量技术:被动视觉测量和主动视觉测量
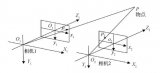
与人眼的立体感知类似,双目立体视觉用两个相机从不同的角度对被测物体成像。依据两幅图像中对应点的立体视差( stereo disparity) ,根据三角测量原理实现三维信息测量。
双目立体视觉是什么样的技术?
双眼视物时,主观上可产生被视物体的厚度以及空间的深度或距离等感觉,称为立体视觉(stereopsis)。其主要原因是同一被视物体在两眼视网膜上的像并不完全相同,左眼从左方看到物体的左侧面较多,而右眼则从右方看到物体的右侧面较多。

在和ADIS16460惯导SPI通信时,读取状态/错误的状态,出现传感器超出范围应该怎么解决?
如图所示,在和ADIS16460惯导SPI通信时候,读取状态/错误的状态,出现传感器超出范围,应该怎么解决?目前是product_id、温度值读取上来数据都是正确的,器件放置于桌子上,三轴加速度的值
发表于 12-28 07:49





 工商网监
工商网监
评论