 欧菲光双光源ToF架构方案 技术赋能新一代扫地机器人
欧菲光双光源ToF架构方案 技术赋能新一代扫地机器人
石头科技于三月底发布先锋旗舰自清洁扫拖机器人V20,该机型首次搭载了新型3D-ToF双光源发射技术,该技术由石头科技、英飞凌、pmd以及欧菲光共同研发、量产。方案通过发射两种不同模式的激光,让机器人能够通过双光源ToF技术往同样的方向,以不同的感知面积,发送不同类型的光信号,并根据信号的返回时间来计算物体与机器人之间的距离,从而完成空间内的深度、高度、宽度的测量理解,让机器人具备空间感知能力,以便进行定位导航和避障,侦测范围可达10米。

石头旗舰自清洁扫拖机器人V20发布现场
传统扫拖机器人的定位导航与避障需求通常选择两个独立传感器来实现,常用LDS激光雷达实现定位导航,结合其他光学测量传感器实现避障。V20率先使用一组传感器,实现完成避障与定位导航功能。双光源ToF的主要优势在于更好的环境适应性,例如:环境光、物体材质等;更小的尺寸,机身高度能做到82mm,甚至更低,使机器有更好的通过性;以及更好的测量可靠性。
石头V20搭载的双光源ToF传感器的实现方式为:通过同一个ToF接收传感器搭配两个不同的大角度激光光源,系统特殊之处在于交替发射点阵和面阵两种不同模式的激光:面阵激光主要用于近距离避障,点阵激光主要用于定位导航。
石头科技集结了pmd、英飞凌和欧菲光三大来自深度摄像头、高端芯片以及光学行业专家共创共研,历经5年时间开发并实现全球首发扫地机上量产。欧菲光是目前唯一支持双光源ToF架构模组量产厂商。双光源ToF具有低功耗、高精度、高采样率、小体积、低算力、远距离探测等优势,集成欧菲光自研检测算法、可检测CG盖板表面残留重度粉尘和脏污等做相关策略处理,广泛适用于扫地机、商服机器人、空气净化器,多足机器人,尺寸测量等各类场景。
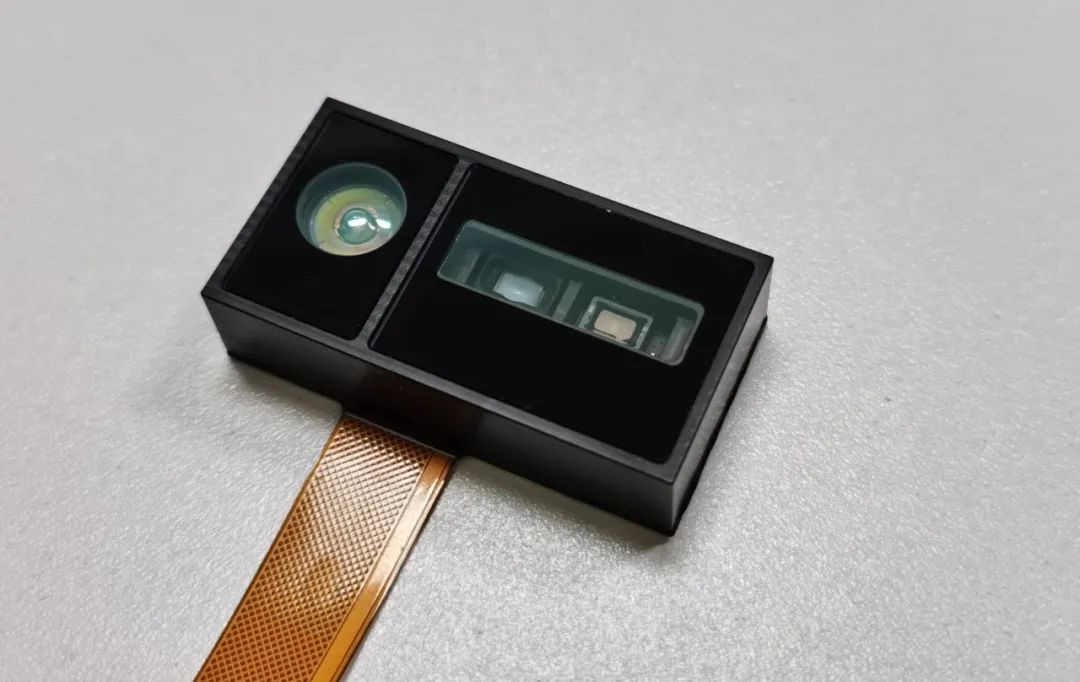
△欧菲光双光源ToF架构模组样品展示图
双光源ToF 模组八大特点
● 创新专利架构定位导航+避障二合一 ;
● 点阵定位导航距离0.1-10米 ,面阵避障距离0.05-1.5米;
● 独特光学设计方案规避多路径问题,提升精度增加探测距离;
● 双光源发射设计规避大颗粒或者蜘蛛网残留影响避障和定位导航异常问题;
● 支持100°/s无运动糊,高动态范围HDR(0.2-10米同时探测);
● 低功耗(避障10fps<0.25W,定位导航双模组10fps<0.5w);
● 低算力 (避障+定位导航,A55单核CPU占用率解算仅需要<50%);
●有效降低整机高度,高可靠性(无机械转动装置)。
作为光学头部厂商,欧菲光凭借在光学光电领域技术优势,抓住新兴市场机遇,将产业布局延伸到了机器人领域。欧菲光微电子团队2019年进入机器人赛道,推出ToF避障模块,出货量kk级别。2024年推出双光源ToF专利架构方案,实现“避障+定位导航技术”、10米探测距离、低功耗、高采样率、低算力等优势,创新引领行业技术革新。
未来,欧菲光将继续深耕机器人赛道,持续研发创新,提供更有性价比、更高性能的智能产品解决方案,助力产业升级。
-
TOF
+关注
关注
9文章
485浏览量
36458 -
欧菲光
+关注
关注
0文章
126浏览量
23224 -
扫地机器人
+关注
关注
21文章
792浏览量
53619
原文标题:欧菲光推出双光源ToF架构方案 技术赋能新一代扫地机器人
文章出处:【微信号:OFILM-Group,微信公众号:欧菲光】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
智能扫地机器人的工作原理和构成
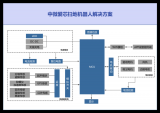
扫地机器人应用解决方案
霍尔开关在扫地机器人中的应用
扫地机器人的技术和芯片方案,有哪些创新?
扫地机器人的核心技术突破
扫地机器人避障技术的发展史
隐形清洁大师:灰尘颗粒物压电传感器引领扫地机器人新一轮智能清洁革命

供应 英集芯IP2348,适用于扫地机器人解决方案的锂电池同步降压充电芯片

光耦知识分享‖探讨光耦技术在扫地机器人的应用

欧菲光推出双光源ToF架构方案,赋能新一代扫地机器人

其利天下技术·搭载无刷电机的扫地机器人的前景如何?
扫地机器人CCC认证申请流程与其他产品的区别是什么?






 工商网监
工商网监
评论