 如何同步运行?--基于EtherCAT的柔性电机驱动系统
如何同步运行?--基于EtherCAT的柔性电机驱动系统
在自动化生产线中,EtherCAT网络轻松实现了过去难以同步控制的成百上千个电机,如流水线等。本文将探讨如何通过柔性电机驱动系统,在EtherCAT网络环境中实现对多电机的精确控制。
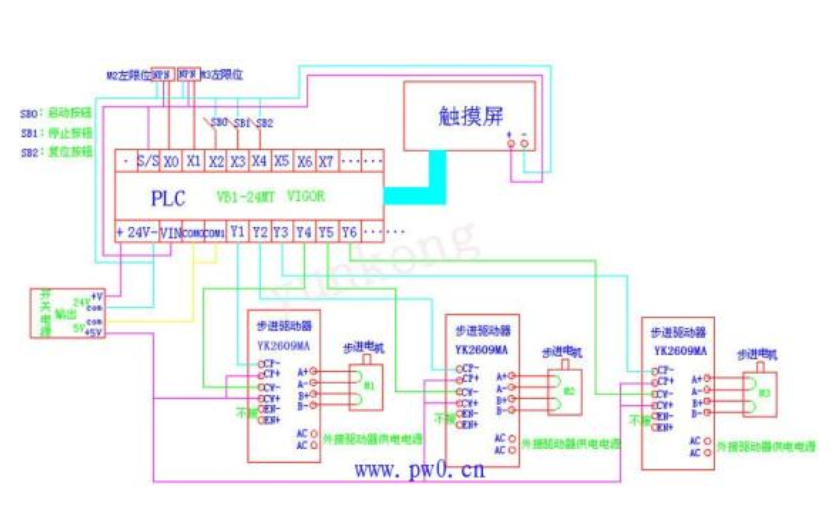
 脉冲信号传统的伺服电机采用I/O脉冲信号控制,主站发一个脉冲,电机走一步。这种驱动器,引线太多、连接不可靠,而且主站也没办法扩展出成百上千组信号出来!
脉冲信号传统的伺服电机采用I/O脉冲信号控制,主站发一个脉冲,电机走一步。这种驱动器,引线太多、连接不可靠,而且主站也没办法扩展出成百上千组信号出来! CAN总线既然I/O脉冲控制接线多、又不能控制太多电机,那能否使用总线统一控制?答案是可以!首先流行起来是CAN总线。CAN总线的时间同步是通过在总线上传输时间戳来实现,能保证总线上的全部从节点统一时间处理数据!但CAN总线理论上最多只支持110个从节点,在实际应用中,由于电气特性的限制,通常不能多于100个节点。而且数据传输速度也不高,常用的CAN2.0A在超高速模式下才1Mbps。这些也导致满足不了数百个电机驱动器的同步要求。但在CAN总线的使用中,CANopen协议应运而生。CANopen中最重要的通讯协议栈是DS301,而DS402是在DS301基础之上拓展出的伺服类控制协议。DS402把一个伺服控制系统应该具有的功能都定义好了,厂家和使用者按照协议即可开发和使用符合标准的设备。正是有了DS402协议标准,为后面的EtherCAT总线铺平了伺服控制的道路。 EtherCAT总线EtherCAT是一个开发的架构,基于太网为基础的现场总线系统。具有以下优点:
CAN总线既然I/O脉冲控制接线多、又不能控制太多电机,那能否使用总线统一控制?答案是可以!首先流行起来是CAN总线。CAN总线的时间同步是通过在总线上传输时间戳来实现,能保证总线上的全部从节点统一时间处理数据!但CAN总线理论上最多只支持110个从节点,在实际应用中,由于电气特性的限制,通常不能多于100个节点。而且数据传输速度也不高,常用的CAN2.0A在超高速模式下才1Mbps。这些也导致满足不了数百个电机驱动器的同步要求。但在CAN总线的使用中,CANopen协议应运而生。CANopen中最重要的通讯协议栈是DS301,而DS402是在DS301基础之上拓展出的伺服类控制协议。DS402把一个伺服控制系统应该具有的功能都定义好了,厂家和使用者按照协议即可开发和使用符合标准的设备。正是有了DS402协议标准,为后面的EtherCAT总线铺平了伺服控制的道路。 EtherCAT总线EtherCAT是一个开发的架构,基于太网为基础的现场总线系统。具有以下优点:
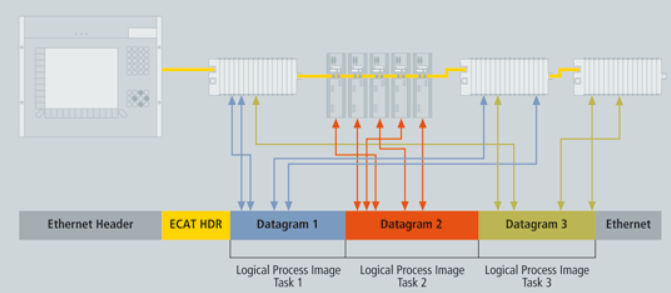
- 高速传输,使用双绞线或光线,可以在30uS内处理1000个分布式I/O信号,或在100uS内处理100个电机轴。
- 精确同步,具有纳秒级别的同步性,协议栈处理延迟仅需几纳秒。
- 灵活拓扑,EtherCAT网络最多可支持65535个从设备,且对拓扑的结构没有限制,线性、树形、星型等拓扑都支持。
对于通讯协议,CANopen被直接移植到EtherCAT总线上使用,称为COE(CANopen over EtherCAT)。对于电机控制,CANopen下的DS402协议被顺理成章地使用。在CAN总线上数据传输速度不高、节点不能多、同步性一般的问题都被迎刃而解。
柔性电机驱动系统致远电子推出柔性电机驱动系统,能满足个性化的接口需求。该系统采用EtherCAT为网络,从站模块面积59mm*50mm,采用40脚标准排针接口。电机驱动、I/O、模拟采集、电源、耦合器等多种模块选择。用户按需制作分线底板即可,从站板插在底板上通过EtherCAT网络级联,最多支持255个。
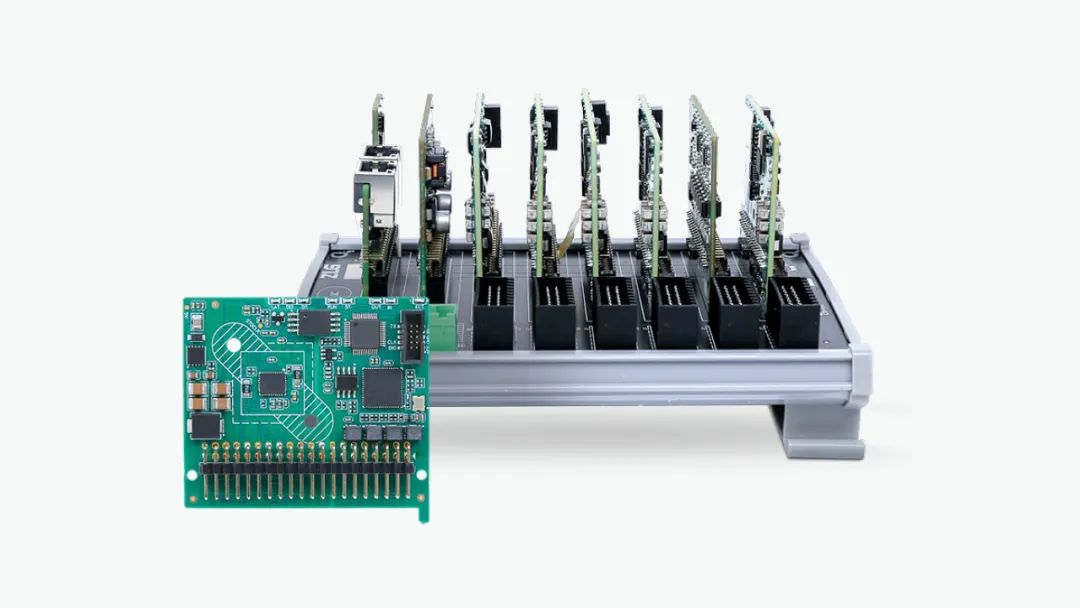
图3ZMD-E1050ETC步进电机驱动模块
- 24V~48V/1.5A的两相步进电机;
- 1/2/4/8/16/32/64/128/256细分选择;
- CiA402运动控制协议,支持CSP/PP/HM/PV模式;
- 3个数字输入,1组ABZ正交编码输入;
- 开环或编码器闭环控制可选。
理论上只要底板做得足够大,就可以串接数百个步进电机驱动模块。但是为了提高可靠性和易用性,每个底板通常只安装10~50个电机模块或其他功能的模块;并通过ZPWB-240302电源模块给EtherCAT部分独立供电;然后通过ZCPB-80600 EtherCAT耦合器,用网线接通上级和下级的底板;最后形成数百个的电机驱动系统。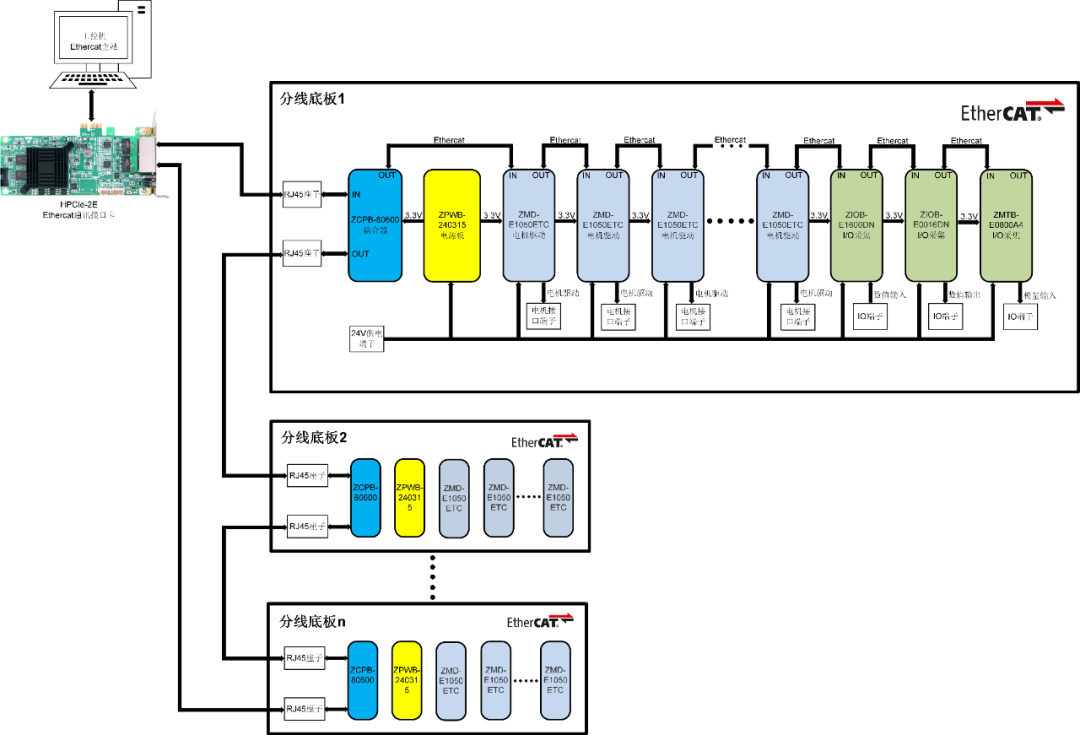
图4
后面的专题,我们将剖析DS402协议中的两种位置控制模式CSP和PP,如何在柔性电机驱动系统中发挥作用。敬请留意。表1电机模组选型表
表2I/O模组选型表

-
电机驱动
+关注
关注
60文章
1203浏览量
86613 -
驱动系统
+关注
关注
3文章
367浏览量
26896 -
ethercat
+关注
关注
18文章
653浏览量
38600
发布评论请先 登录
相关推荐
ethercat总线伺服如何控制 EtherCAT运行原理
基于全志T507-H的Igh EtherCAT主站案例分享
TMC8670 – 集成EtherCAT通讯和FOC伺服运动控制芯片适用2/3相永磁同步电机
如何实现从网络主机直至电机终端的全程同步
资料下载:在CODESYS中通过EtherCAT总线驱动单个电机
在CODESYS中怎样通过EtherCAT总线去驱动单个电机呢
开源!ZYNQ IgH EtherCAT主站方案分享
基于FPGA的新型高性能永磁同步电机驱动系统设计
伺服电机间同步传动的柔性化控制

采用西门子S7400系列PLC与变频器解决分散驱动电机同步运行问题
如何优化电机驱动系统 电机与驱动的通信协议探讨





 工商网监
工商网监
评论