 北航教授团队推出微型机器昆虫BHMbot最新研究成果
北航教授团队推出微型机器昆虫BHMbot最新研究成果
5月16日,北京航空航天大学公布了其闫晓军教授团队在机器昆虫领域取得的最新进展。
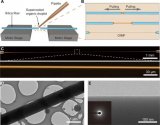
该研究团队研发出一款适用于昆虫大小的机器人的微型动力装置,并在此基础上开发出具备无线控制、高速机动以及大载重量等特点的微型机器昆虫——BHMbot(长度2cm,重量1.76g)。这一创新成果已发表于知名学术期刊《自然·通讯》上。
据悉,BHMbot成功攻克了微型机器人领域三个关键难题:
1. 提升微型动力系统的能量转换效率。研究团队利用直线式驱动器将电能转化为机械能,再由柔性铰链传动机构将其转变为仿生腿的周期振动及机器昆虫的高频弹跳运动,从而实现电能至动能的高效转换。
2. 增强机器昆虫的载重能力。传统机器昆虫在负载后性能会有所下降,但BHMbot通过设计并实现仿生奔跑步态,使其在奔跑过程中通过自适应调整步频和步幅,实现高载重下的快速爬行。即使承载5.5倍自身质量的重物,BHMbot仍能保持每秒25倍身长的速度。
3. 实现对机器昆虫运动轨迹的精准控制。研究团队研发了厘米级别的微型控制和通讯电路,使得BHMbot既能进行程序控制也能接受遥控操作。
BHMbot可根据预设程序完成圆形、矩形和字母“BUAA”等多种运动轨迹,同时操作者还可通过电脑或手机发送实时指令,实现无线遥控避障功能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
驱动器
+关注
关注
54文章
8372浏览量
147686 -
动力系统
+关注
关注
1文章
295浏览量
20776 -
微型机器
+关注
关注
0文章
2浏览量
5751
发布评论请先 登录
相关推荐
香港科技大学陈敬教授课题组公布氮化镓与碳化硅领域多项最新研究成果
2024 )上报告了 多项基于宽禁带半导体氮化镓,碳化硅的最新研究进展 。研究成果覆盖功率器件技术和新型器件技术: 高速且具备优越开关速度控制能力的3D堆叠式GaN/SiC cascode 功率器件

童利民、郭欣研究团队发文报道有机小分子冰微纳光纤
1 研究成果概述 近日,浙江大学光电科学与工程学院童利民教授、郭欣教授研究团队,通过直接拉伸过冷有机液滴的方法,在低温下研制成功直径小至20
马里兰大学王春生教授团队最新研究成果:探索水系锌电池的电解质设计
²⁺溶剂化壳层中水的还原引起,会生成氢气,加速Zn表面副反应;Zn沉积的非均匀性则易导致枝晶生长,进而损坏电极界面。 成果简介 基于此,马里兰大学王春生教授团队提出了一种基于 Et(30) 极性参数 的水系锌电池电解液优化策略,

基于漩涡湍流辅助的微流控平台,可实现类精子结构的微型机器人一步成型
团队提出了一种基于漩涡湍流辅助的微流控平台(VTAM),可实现类精子结构的微型机器人一步成型,配合外部磁场驱动为药物递送提供了新的载体。该研究团队进一步将微游动器导入生物体模拟环境,并

庆熙大学团队研发高效可拉伸OLED
据韩媒Kyosu报道,庆熙大学信息显示系的徐敏哲教授研究团队在OLED技术领域取得了重大突破。他们成功开发出一种新型有机发光二极管(OLED),该OLED不仅色彩变化受视野角影响小,而且具有高效率的结构伸缩性。相关
SynSense时识科技与海南大学联合研究成果发布
近日,SynSense时识科技与海南大学联合在影响因子高达7.7的国际知名期刊《Computers in Biology and Medicine》上发表了最新研究成果,展示了如何用低维信号通用类脑

中移芯昇发布智能可信城市蜂窝物联网基础设施研究成果
8月23日,雄安新区RISC-V产业发展交流促进会顺利召开,芯昇科技有限公司(以下简称“中移芯昇”)总经理肖青发布智能可信城市蜂窝物联网基础设施研究成果,为雄安新区建设新型智慧城市赋能增效。该成果

开启全新AI时代 智能嵌入式系统快速发展——“第六届国产嵌入式操作系统技术与产业发展论坛”圆满结束
中午部分嘉宾参观了杭研院大数据科学与脑机智能研究中心的智能机器人研究成果。
图6 嘉宾参观实验室
论坛下午主题是“智能机器人操作系统技术与生态建设”主题论坛和嘉宾讨论。下午会
发表于 08-30 17:24
北航成功研发微尺寸仿生机器人——昆虫机器人
据中央电视台报道,北京航空航天大学科研团队历经15年,成功研发出微尺寸仿生机器——“昆虫”机器人。这款机器人设计灵感源于蟑螂,外形如同硬币,
捷克研发微型机器人,捕获水中塑料废物及细菌
微塑料的尺寸通常小于5毫米,易被动物误食,进而影响整个生态系统。此外,微塑料还可能吸附各类细菌,增加生物健康风险。为此,捷克布尔诺理工大学开发了一套微型机器人系统,以应对这一挑战。
中国科学技术大学科研团队取得量子计算研究新进展
教授潘建伟院士介绍,该成果是量子模拟技术的重要突破,将很快用于模拟量子系统,推动量子物理研究和量子计算的发展。 相关研究成果发表于《科学》,这一成果
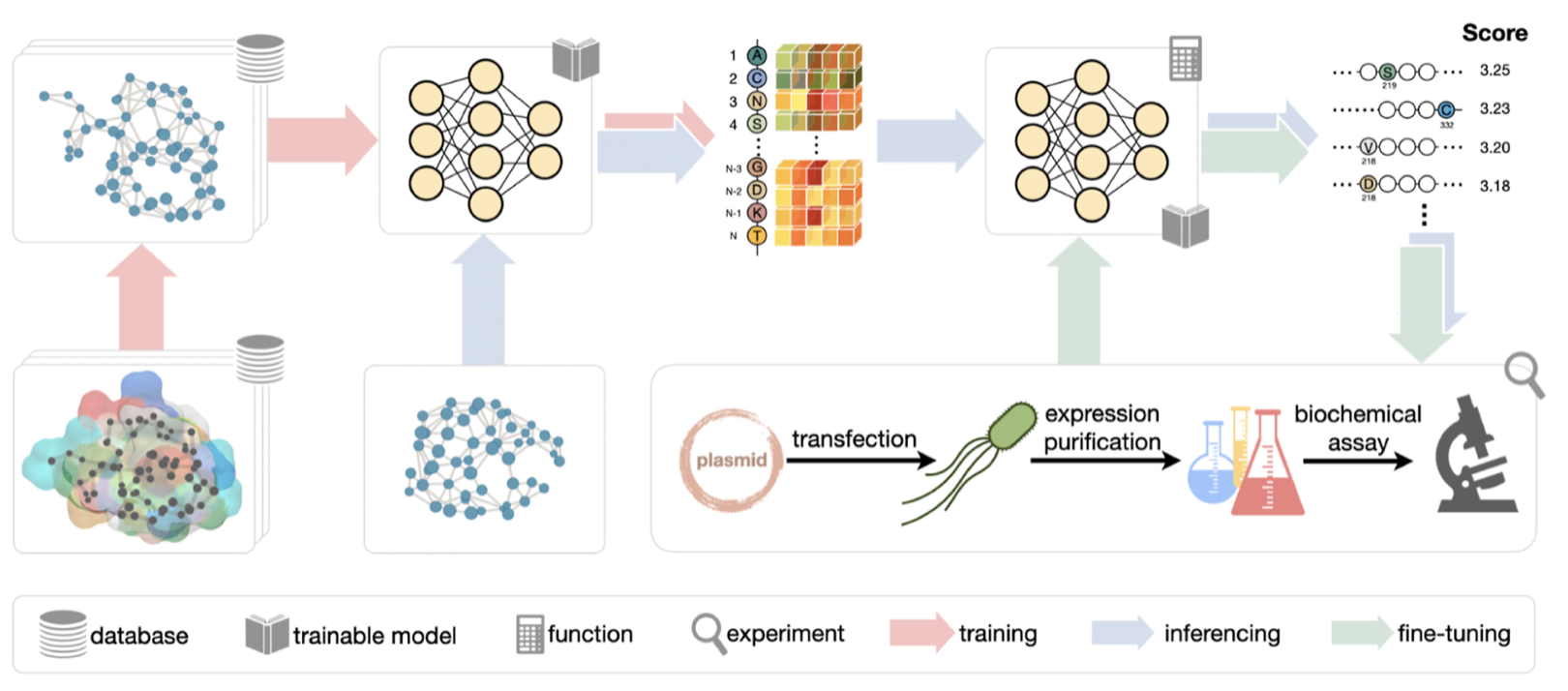
洪亮团队在生信期刊JCIM发布最新成果,蛋白质工程迈入通用人工智能时代
近日,天鹜科技创始人&首席科学家洪亮教授团队,在生物信息学和人工智能研究领域的国际权威学术期刊JCIM(Journal of Chemical Information and Modeling)上
刘勇国教授团队在IEEE Transactions on Image Processing发表新研究成果
在疾病阶段识别的过程中,他们巧妙地运用了线性判别分析和子空间稀疏正则化方法,有效识别出疾病阶段相关的脑影像特征。同时,模型还引入了局部保留的类内散度矩阵以及自适应学习样本间的局部关系。
华中科大在近场光学成像方向取得重要进展
近日,《自然·纳米技术》(Nature Nanotechnology)在线刊发华中科技大学李培宁教授团队题目为“Van der Waals quaternary oxides for tunable low-loss anisotropic polaritonics“

西安交大耿莉教授团队在国际固态电路会议展示最新芯片研究成果
在此次会议中,中国西安交通大学微电子学院副教授樊超与合作团队共同发表了题为“基于0.07 mm²、220到23.8 GHz、8相频率源优化的磁+双注入耦合设计”的论文。





 工商网监
工商网监
评论