 激光雷达芯片技术发展 激光雷达在无人驾驶中的应用
激光雷达芯片技术发展 激光雷达在无人驾驶中的应用
激光雷达的工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对飞机等目标进行探测、跟踪和识别。
激光雷达诞生背景
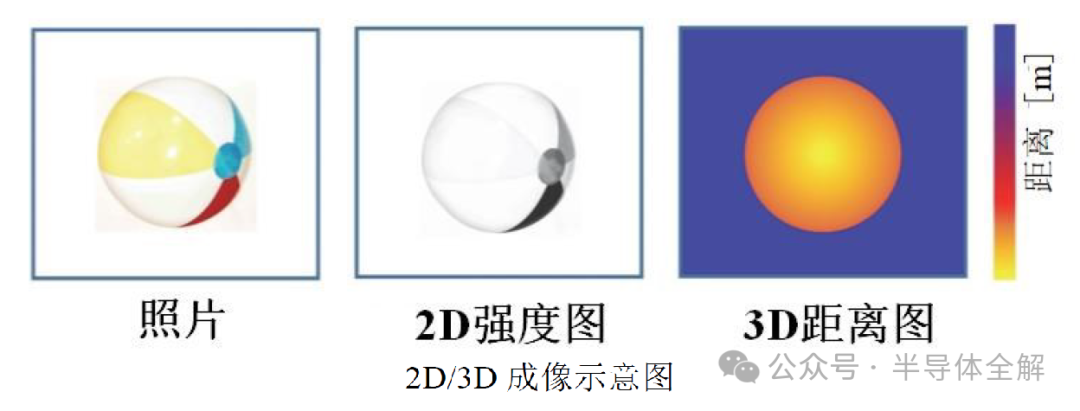
早期,人类用绘画记录各种场景,随着相机的发明,人们开始用相片记录美好事物,早期的相机是基于胶片冲印,直到柯达公司在1975年开发出世界上第一款数字照相机。 照相机等可以实现2D图像获取的设备仪器极大地满足了人们对图像记录的追求,但是实际的生活中,人们感兴趣的场景也包含三维(Three Dimension, 3D)信息,如距离、高度等信息。
下图给出了一个2D/3D成像的示意图。可以看出2D强度图并不能给出物体表面的弯曲程度和立体信息。因此可以实现3D成像的方案也是人们一直研究的方向。在3D成像应用中,激光雷达(LiDAR, Light Detection And Ranging)成为目前最普遍也是最有前景的技术方案。
激光雷达技术(Light detection and ranging, LiDAR)起源于微波雷达技术(Radio detection andranging, RADAR),是一种利用激光作为发射光源的主动探测及测距系统。得益于激光的较短波长和出色的方向性、单色性等特点,激光雷达可以实现高精度、高距离分辨率、高角度分辨率的测量及成像。
激光雷达芯片技术发展
早期的激光雷达是基于分立元件的。分立元件的最大问题在于集成度较低,因此由分立器件构建的激光雷达系统通常具有体积大、可靠性低、价格昂贵等缺点。提高激光雷达的集成度,首先就要从光电转换器件考虑。
随着集成电路制造工艺的发展,功能多样的后端处理电路也可以通过半导体器件实现。这使得将光电器件与后端处理电路集成在单颗芯片上成为可能。根据工作模式的不同,光电二极管被分为传统光电二极管和雪崩光电二极管(Avalanche Photodiode, APD)。其中APD 具有较高的增益,因此更适合于LiDAR 应用(通常需要相对较远的探测距离)。APD又可以被分为线性APD和盖革模式APD两种。其中盖格模式 APD 可以实现单光子水平检测,又被称为单光子雪崩二极管(SinglePhoton Avalanche Diode, SPAD)。
理论上来说线性APD和SPAD都可以实现全集成雷达,但是至今没有出现可大规模集成的 APD阵列。这是因为阵列化APD的一致性很难保证。当前市场上的商用APD都是基于分立器件,因此无法实现单片全集成。
下图给出了 Hamamatsu 公司的商用化APD系列器件。独立的封装使得其无法实现大规模集成,因此无法用于全集成激光雷达。

相应的 SPAD 器件的特性与光电倍增管类似,具有较高的增益,可以达到单光子探测水平。其输出信号是数字化的信号,可以实现优异的一致性。
光电倍增管作为一种高性能的光电转换器件在早些年被广泛的应用于激光雷达应用中。光电倍增管是一种由玻璃封装的真空装置,通常由一个阴极和若干个二次发射极和一个阳级构成。当一定光子照射到阴极时,由于光电效应,阴极会发射光生电子。这些电子会被加速发射向一些被称为二次发射极的附加电极并产生新的电子。这种级联效应会使的每个入射的光子都会产生10E5到 10E7个电子。这种放大效应取决于二次发射极的个数和加速电压的大小。光电倍增管具有噪声小,动态范围大以及增益高等优点。但是过大的体积和过高的工作电压使得其不适应于全集成激光雷达方案。
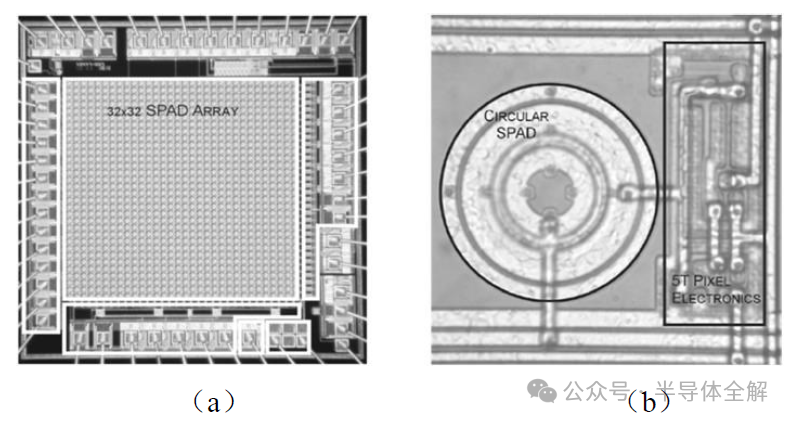
在学术界,早在 2005 年,来自瑞士洛桑理工大学的 Cristiano Niclass 等人首次在标准0.8mm CMOS工艺上实现了大规模SPAD像素阵列,其像素规模达到了32´32。下图显示了该 SPAD 芯片照片和像素照片,图中(a)为芯片照片(b)为像素照片。从其像素照片可以看出像素中包含了由5个CMOS 晶体管构成的简单的处理电路。虽然该芯片的内部电路处理电路只能完成淬火等简单的功能,仍然需要将信号输出到芯片外,并由片外的时间数字转化器完成测距等更加复杂的信号处理,但是该项工作验证了全集成的可行性。
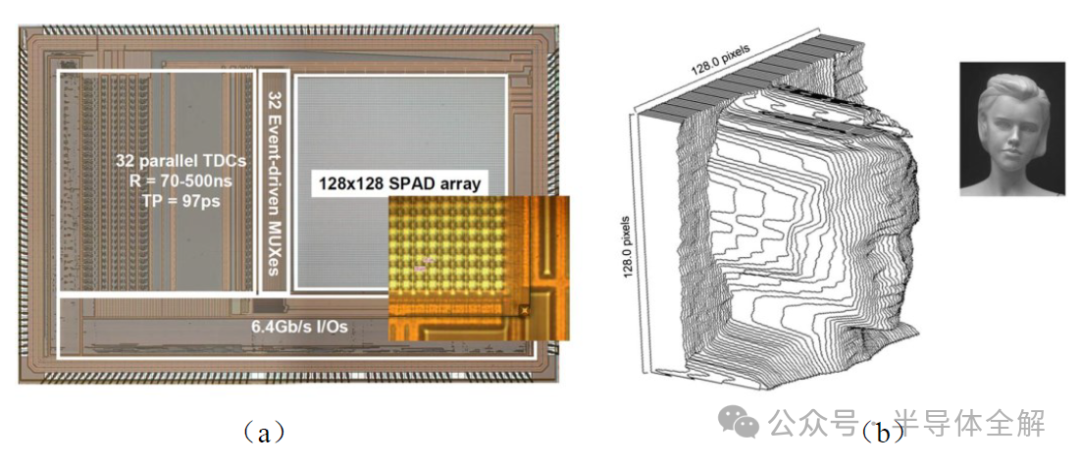
在 2008 年, Niclass 等人又发表了首个基于 SPAD 的全集成 LiDAR 传感器芯片。该芯片采用的是0.35mm 高压 CMOS 工艺。下图为该 LiDAR 传感器的芯片照片和成像效果。从图(a)中可以看出该传感器芯片集成了32路并行,精度为97ps的时间数字转换器(Time to Digital Converter, TDC)和速度高达6.4Gb/s的数据接口。图(b)为视场角 30 度情况下的一个距传感器 1m 的模特的 3D 成像效果。由于其极高的空间分辨率和时间分辨率,模特的五官特征都可以清晰地分辨出来。
近些年来随着 CMOS 工艺节点的进步,SPAD 激光雷达传感器的空间分辨率(像素数目)不断提高,支持的模式和功能不断增加。这是当前基于 SPAD的激光雷达的两个主要研究目标,即实现更高的像素数目,支持更多功能以及适应于更多应用场合。
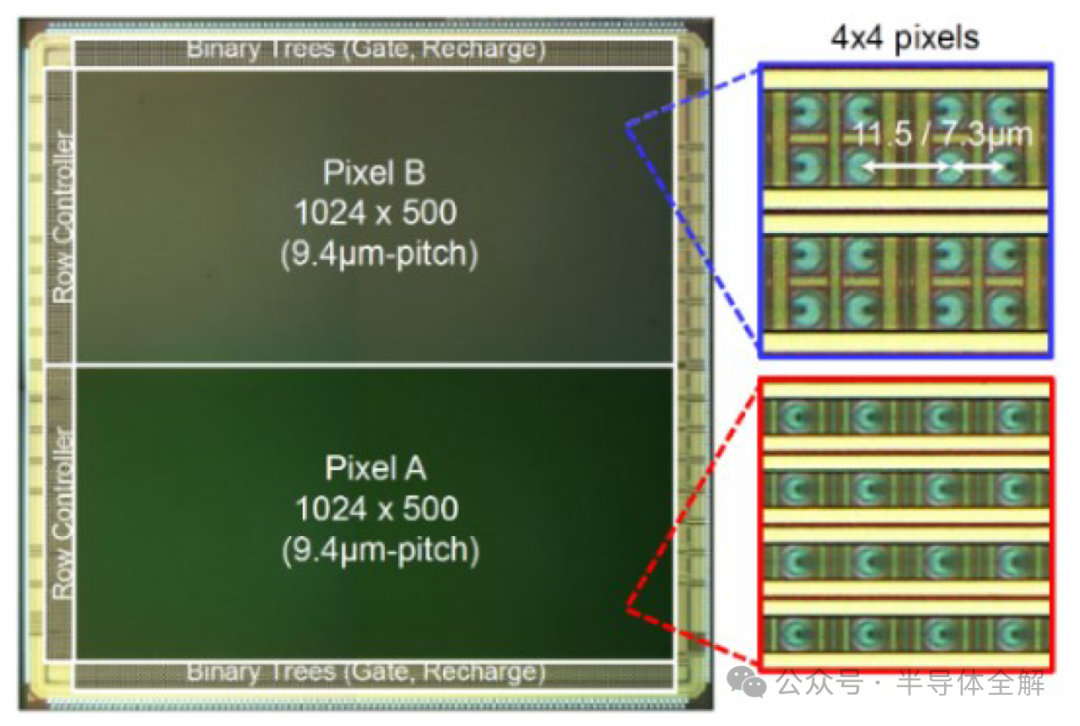
2019 年12月来自日本佳能的 Kazuhiro Morimoto 和来自瑞士洛桑理工的科研工作者合作采用 0.18mm CIS 工艺实现了世界上首款像素数目达到 1M 的 SPAD 激光雷达。这是目前为止,世界上像素数目最多的 SPAD 激光雷达。该像素采用了极为简单的像素内电路。如图所示,该激光雷达由两种像素构成,两种像素内部的晶体管数目分别为 7 个(pixel A)和 5.75 个(pixel B)。Pixel B 中的处理电路被相邻两个像素共用。两种像素的尺寸仅为 9.4um,因此即使像素数目巨大,整体芯片尺寸仅为 11mm*11mm。
2019 年来自英国爱丁堡大学的 Sam.W.Hutchings 等人发布了一款基于 3D 堆叠的 SPAD 激光雷达。该团队采用 90nm CMOS 工艺设计优化了 SPAD 器件,采用先进 的 40nm 工艺实现后端处理电路,集成了更多的元件(每个像素内包含了1个多事件 TDC 和16个14 位计数器)。SPAD 器件芯片和处理电路芯片通过混合键合的封装技术(hybrid bonding)连接在一起。由于具有丰富的处理电路资源,该芯片支持单光子计数、高动态范围计数、多事件直方图统计以及首个光子计时等多种工作模式,可以应用于 2D 成像、直接飞行时间(Direct Time of Flight, dTOF),间接飞行时间(Indirect Time of Flight, iTOF)以及荧光寿命检测等多种应用场合。
通过上述发展趋势,可以看出基于SPAD的雷达传感器的像素数目也符合摩尔定律。
激光雷达在无人驾驶中的应用
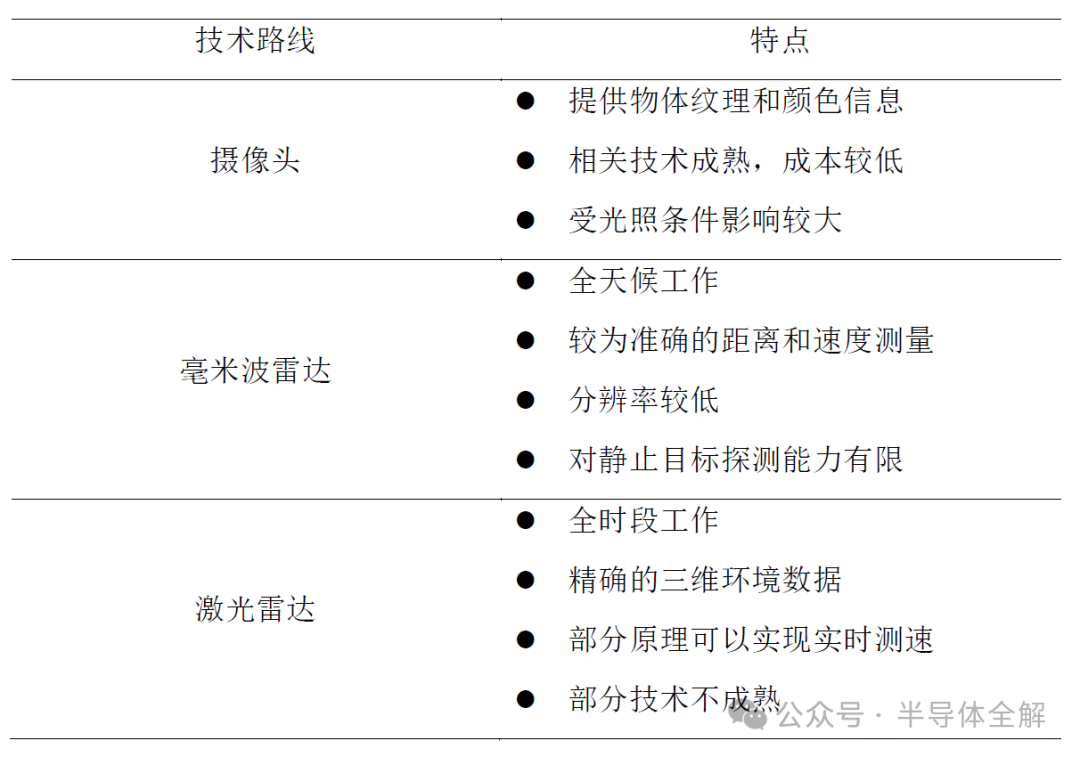
在自动驾驶的核心技术中,环境感知模块是最重要的技术之一,它可以为自动驾驶技术提供包括人、车辆、障碍物等环境信息,是自动驾驶技术的“眼睛”,环境信息的准确与自动驾驶的安全性直接相关。在自动驾驶技术中,用于环境感知模块的方案主要包括:摄像头、毫米波雷达、激光雷达等。其中,摄像头可以提供较为丰富的物体纹理以及颜色等信息,并且相关技术成熟,成本较低,是目前应用较为广泛的方式。但是摄像头存在一定缺陷,由于采用的是图像分析的方式,其对于距离的感知能力较弱,成像效果受到光照条件的影响;除此之外,摄像头还存在着容易被“误导”、 “欺骗”等问题。
毫米波雷达的原理与激光雷达相似,其优点在于抗干扰能力强,能够在恶劣的环境下工作,并且可以实现对目标距离和速度的测量。缺点则在于分辨率较低,难以区分靠近或重叠的目标,并且对于静止的物体识别能力有限。
激光雷达作为主动探测方式,可以实现全时段工作,不受环境光影响,并且激光雷达测距精度更高,能够为汽车提供丰富、准确、可靠的三维环境数据,结合调频连续波等测距原理还可以实现对物体的实时测速。
下表为摄像头、毫米波雷达、激光雷达三条技术路线的优缺点对比。
激光雷达扫描方式分类
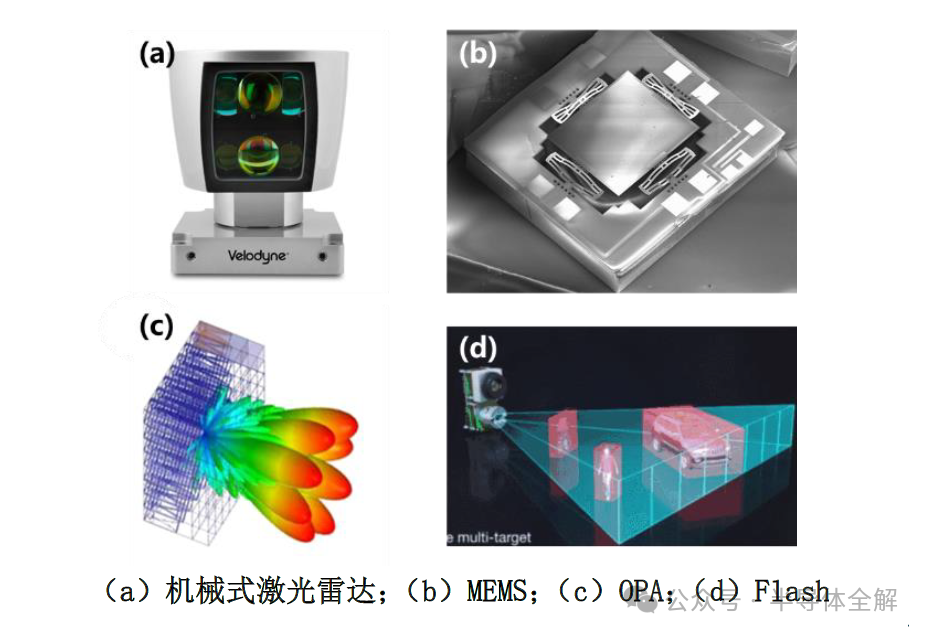
激光雷达的光束扫描方式,按照是否包含机械部件可分为:机械式扫描、混合固态式扫描及全固态式扫描。
目前,商用激光雷达普遍使用机械式扫描方式,即利用旋转的机械部件(如反射镜、棱镜等)控制光束扫描方向,实现较大范围的视场角,导致机械式激光雷达存在体积大、质量重、功耗高、可靠性差、成本高等诸多缺陷。
混合固态式激光雷达包括微机电系统(MicroelectromechanicalSystems, MEMS)式及棱镜式。MEMS 激光雷达是利用尺寸较小的机电器件代替较大的机械扫描器件带动内置反射镜的倾斜角度变化从而实现对入射光束指向角度的改变,实现激光光束对场景的扫描。MEMS激光雷达中仍然有移动部件,因此被分类为混合固态式激光雷达,常见的 MEMS 式激光雷达的驱动方式包括静电、电磁、压电和电热驱动等。MEMS式激光雷达一定程度上克服了传统机械式激光雷达存在的缺点,具有体积小、功耗低、易于集成等优势,但仍然存在扫描角度和扫描精度比较受限的问题。
相较于机械式激光雷达与混合固态式激光雷达,全固态式激光雷达彻底抛弃了机械部件,解决了体积大、稳定性差等问题,因此被认为是激光雷达发展的必然趋势。全固态激光雷达主要分为闪光(Flash)式和光学相控阵式,Flash式激光雷达的原理类似于闪光式相机,在短时间内向待测空间内发射大面积的激光信号,并由灵敏度较高的探测器接收待测目标反射的回波信号,进而实现对待测场景的成像。
如图(d),Flash式激光雷达将发出的激光信号散布在整个视场范围内,这意味着其探测视场越大,等量的功率所需覆盖的面积越大,激光的平均功率密度越低,探测距离越短,探测精度越低。
另一种全固态激光雷达。OPA(相控阵)式激光雷达是典型的“芯片式”激光雷达,具有体积小、功耗低、可靠性高等诸多优势。以波导型光学相控阵为例,其原理是通过控制不同波导之间的相位差改变衍射光干涉增强的方向,进而实现光束的转向和扫描。相较于 Flash 式激光雷达,激光更集中于部分区域甚至一个“点”上,平均功率密度更高,探测距离更远,探测精度更高。同时由于其采用互补金属氧化物半导体(Complementary Metal Oxide Semiconductor, CMOS)技术制作,便于与激光器等部件进行片上集成,是实现全固态、低成本、高可靠性激光雷达的最佳技术路线。
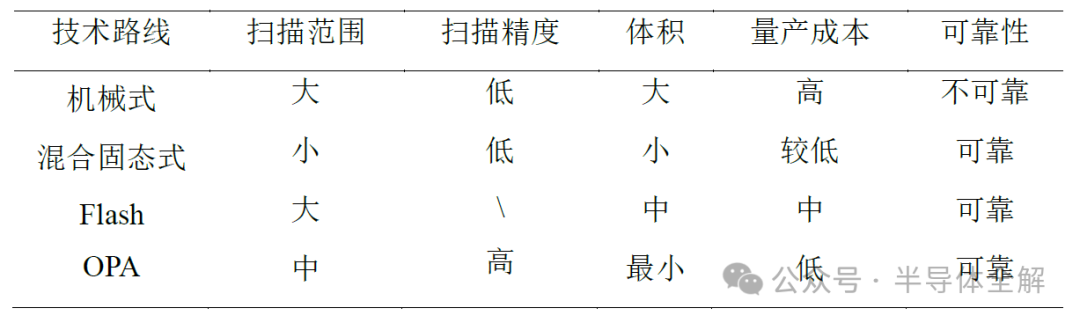
下表中为常见激光雷达光束扫描方式对比,OPA 相较于其他扫描方式在扫描精度、体积、成本、可靠性等方面都有较大优势,因此 OPA 成为了激光雷达领域的研究热点,被誉为最有发展前景的激光雷达技术。
基于机械旋转扫描的激光雷达存在可靠性等问题,即在长期运转过程中机械的精度和可靠性都得不到保证。因此,未来的车载激光雷达也会向非机械旋转的激光雷达方案发展。
审核编辑:刘清
-
光电转换
+关注
关注
1文章
98浏览量
23408 -
激光雷达
+关注
关注
968文章
3981浏览量
190037 -
光电二极管
+关注
关注
10文章
402浏览量
35972 -
无人驾驶
+关注
关注
98文章
4068浏览量
120594 -
3D成像
+关注
关注
0文章
98浏览量
16105
原文标题:一文了解激光雷达技术及应用
文章出处:【微信号:bdtdsj,微信公众号:中科院半导体所】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论