 RZ/N2L EtherCAT RMII时钟域解决方案和优势解析
RZ/N2L EtherCAT RMII时钟域解决方案和优势解析

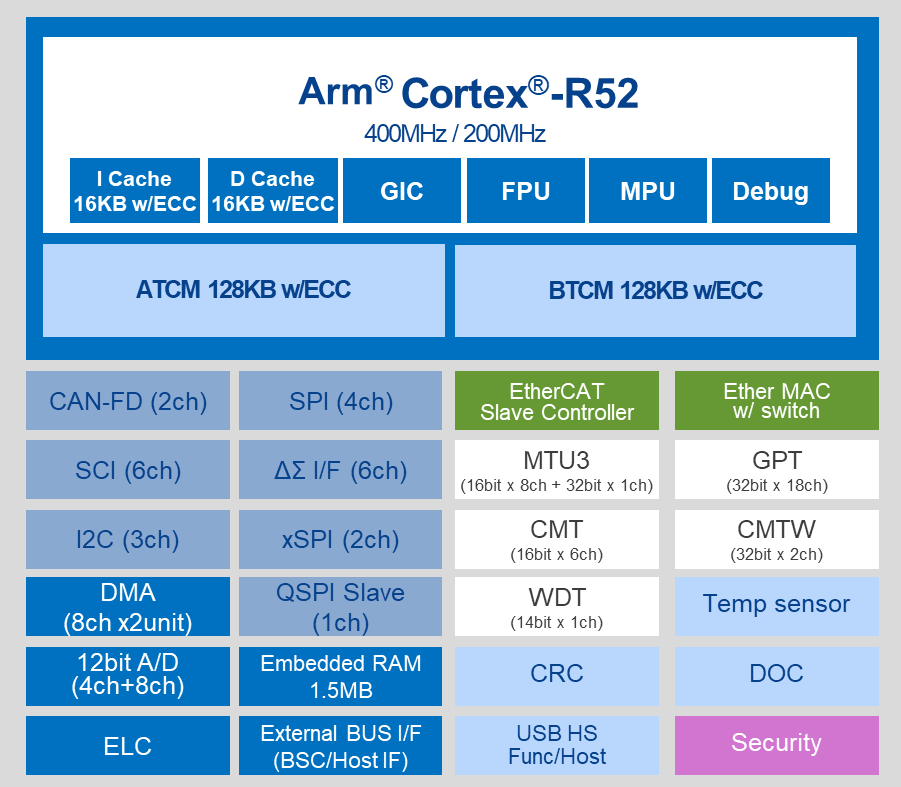
瑞萨RZ/N2L MPU
RZ/N2L是一种工业以太网通信用MPU,可轻松将网络功能添加到工业设备中。它搭载支持TSN的三端口千兆以太网交换机和EtherCAT从控制器,可支持EtherCAT、PROFINET RT/IRT、EtherNet/IP、OPC UA等主要的工业以太网通信协议。它对网络专用配套芯片加以优化,无需大幅改变设备的内部配置即可直接连接并快速访问外部应用主机CPU。此外,Arm Cortex-R52的最大工作频率为400MHz,外设功能包括带ECC的大容量RAM与ΔΣ I/F、A/D转换器、PWM定时器、UART和CAN等,可在单个芯片上实现远程I/O、传感器集线器、变频器和网关。
1
应用场景描述
中国一家自动化和IT解决方案供应商正在RZ/N2L平台上测试自己的EtherCAT设备。测试中的EtherCAT系统由62个I/O模块和4个耦合器组成,网络拓扑如图1所示。
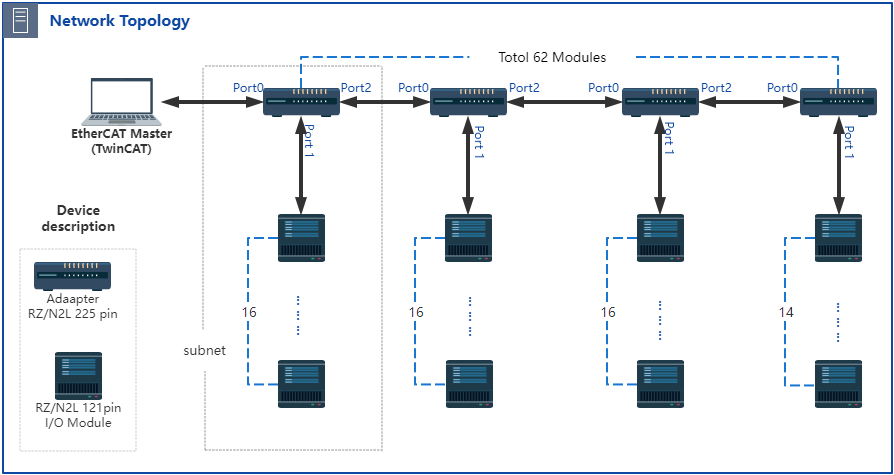
图1 网络拓扑图
2
问题描述
客户在测试过程中遇到了一个问题,有时系统启动时EtherCAT主站无法扫描到子网中的所有设备。直接原因是主站扫描处理时出现“丢帧”,耦合器和I/O模块均出现错误。解决这个问题的唯一方法是重新启动整个系统。
3
瑞萨提供的解决方案和优势以及如何解决问题
RZ/N2L平台同时提供MII和RMII接口,客户在其应用中选择RMII并获得以下好处:
对于使用RZ/N2L,该平台可以产生与PHY芯片共享的RMII_REFCLK。这可以帮助客户节省一颗晶振,从而降低BOM成本,大约可以节省1元左右的成本。
由于RMII接口需要的引脚比MII少,这使得客户可以轻松布局PCB板,并有额外的引脚可用于其他功能。
为了找到根本原因,我们与客户一起进行了大量的猜测和测试。最后找到了一种将PHY设备工作模式从Master切换到Slave的方法。我们发现不同时钟域的一致性是实时以太网应用中的一个重要考虑因素。当PHY (DP83826) 工作在主模式时,PHY和MAC (TX/RX) 可能工作在不同的时钟域(如图2左侧部分)。如果一致性差,RX端口可能会丢帧。相对而言,当PHY和MAC (TX/RX) 工作在同一时钟域时(如图2右侧部分),该问题可以解决。客户也通过测试验证了该方案。
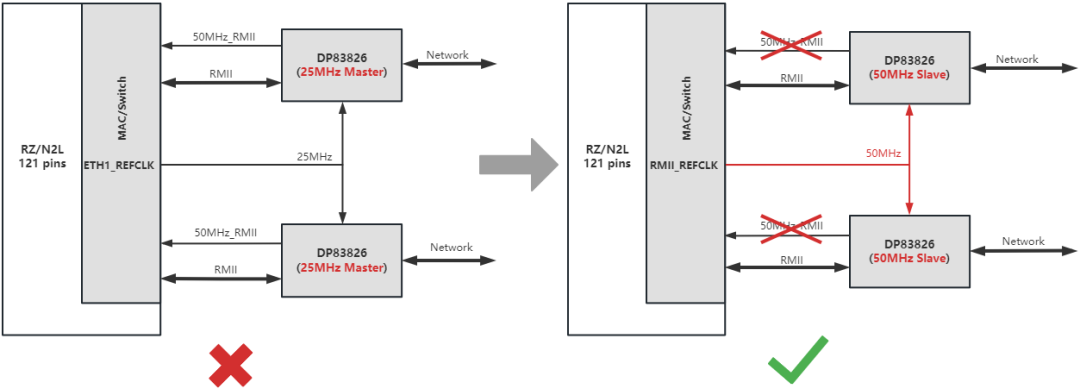
图2 PHY芯片时钟源模式对比
4
项目收获
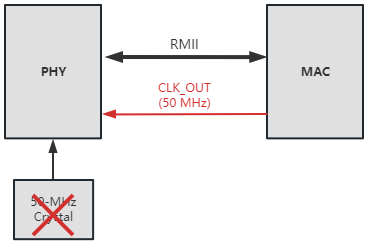
虽然PHY问题已经解决,但是客户还是提出了一个问题,为什么Mater中的PHY时钟源模式无法正常工作。我们试图回答这个问题,并从内部讨论和分析中找到了一些线索。仍然需要解决PHY连接模式和时钟域问题。除此之外,我们还举了一个例子,在2端口应用中,理论上只有1个PHY应该工作在主模式,另一个应该工作在从模式,如图3右侧部分。(连接图尚未验证,仅供参考。)
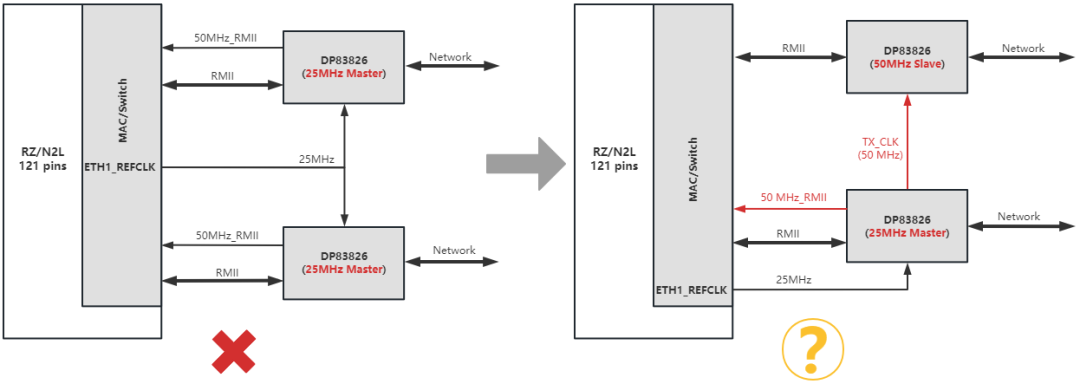
图3 MAC-PHY连接比较
5
结论
经过以上分析比较,我们建议MAC-PHY接口设计如图2右侧所示。显然它具有以下一些优点:
连接简单
简单的PHY芯片驱动配置
容易明白
易于在其他相关应用中推广和复制
对于应用程序:
MII接口仍然是EtherCAT应用的第一选择;
如果客户由于某种原因不得不选择RMII,请务必使用从属模式。
审核编辑:刘清
-
控制器
+关注
关注
114文章
17909浏览量
195724 -
集线器
+关注
关注
0文章
465浏览量
41943 -
工业以太网
+关注
关注
10文章
694浏览量
43907 -
时钟域
+关注
关注
0文章
53浏览量
10074 -
EtherCAT总线
+关注
关注
5文章
98浏览量
5993 -
pwm定时器
+关注
关注
0文章
6浏览量
2166
发布评论请先 登录



瑞萨电子RZ MPU家族精品RZ/N2L产品介绍




评论