 PID控制器中P、I、D的含义
PID控制器中P、I、D的含义
一、引言
PID(Proportional-Integral-Derivative)控制器,作为工业自动化领域中最常用的控制算法之一,其广泛应用于各种控制系统中,如温度控制、流量控制、压力控制等。PID控制器的核心在于通过调整比例(P)、积分(I)和微分(D)三个参数,实现对被控对象的精确控制。本文将详细探讨PID控制器中P、I、D的含义、作用及其在控制系统中的应用。
二、PID控制器概述
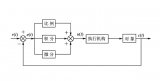
PID控制器是一种基于偏差的控制算法,它通过计算当前系统输出与设定值之间的偏差,然后根据这个偏差来调整控制量,使系统输出逐渐逼近设定值。PID控制器由比例环节(P)、积分环节(I)和微分环节(D)三个部分组成,每个部分都对控制效果起着重要的作用。
三、PID控制器中P、I、D的含义及作用
比例环节(P)
比例环节是PID控制器中最基本的部分,它根据系统偏差的大小直接调整控制量。偏差越大,控制量调整得越多;偏差越小,控制量调整得越少。比例环节的作用是快速响应系统偏差,使系统输出能够快速向设定值逼近。但是,仅仅依靠比例环节往往难以消除稳态误差,因为当系统偏差接近于零时,比例环节的控制作用也会逐渐减弱,导致系统输出无法稳定在设定值。
积分环节(I)
积分环节是为了消除稳态误差而引入的。它通过对系统偏差进行积分运算,得出一个与偏差持续时间成正比的积分项,并将其加到控制量上。积分环节的作用是逐渐减小稳态误差,使系统输出稳定在设定值附近。但是,积分环节也可能导致系统响应变慢或产生积分饱和现象。积分饱和是指当系统偏差长时间保持在同一方向时,积分项会不断累积增大,导致控制量过大或过小,从而使系统输出产生过冲或欠冲现象。
微分环节(D)
微分环节是为了改善系统动态性能而引入的。它通过对系统偏差进行微分运算,得出一个与偏差变化率成正比的微分项,并将其加到控制量上。微分环节的作用是预测系统偏差的变化趋势,提前调整控制量,从而加快系统响应速度并减小超调量。微分环节对于抑制系统振荡、提高系统稳定性具有重要作用。但是,微分环节也可能放大高频噪声信号,对系统产生不利影响。
四、PID控制器中P、I、D参数的调整
在PID控制器的应用中,如何合理设置和调整P、I、D三个参数是一个关键问题。一般来说,参数调整应遵循以下原则:
比例系数Kp的选取:Kp的大小决定了系统响应速度和对偏差的敏感度。Kp过大可能导致系统超调或振荡;Kp过小则可能导致系统响应过慢。因此,应根据系统特性和控制要求合理选取Kp的值。
积分系数Ki的选取:Ki的大小决定了系统消除稳态误差的能力。Ki过大可能导致系统产生积分饱和现象;Ki过小则可能导致稳态误差无法消除。因此,应根据系统稳态误差的要求合理选取Ki的值。
微分系数Kd的选取:Kd的大小决定了系统对偏差变化率的敏感度。Kd过大可能导致系统对高频噪声信号过于敏感;Kd过小则可能导致系统响应速度变慢。因此,应根据系统动态性能的要求合理选取Kd的值。
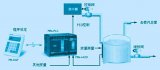
五、PID控制器的应用实例
PID控制器在工业自动化领域具有广泛的应用。以温度控制系统为例,通过PID控制器可以实现对温度的精确控制。在温度控制系统中,PID控制器根据当前温度与设定温度之间的偏差,调整加热或制冷设备的输出功率,使温度逐渐逼近设定值。通过合理设置和调整P、I、D三个参数,可以使温度控制系统具有较快的响应速度、较小的稳态误差和较好的稳定性。
六、结论
PID控制器作为工业自动化领域中最常用的控制算法之一,其通过调整比例、积分和微分三个参数实现对被控对象的精确控制。本文详细探讨了PID控制器中P、I、D的含义及作用,并介绍了参数调整的原则和应用实例。在实际应用中,应根据系统特性和控制要求合理设置和调整PID控制器的参数以提高系统的性能。
-
PID控制器
+关注
关注
2文章
172浏览量
18551 -
工业自动化
+关注
关注
17文章
2283浏览量
67175
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论