 步进电机的驱动方法有哪些
步进电机的驱动方法有哪些
一、引言
步进电机,作为一种将电脉冲信号转换为角位移或线位移的开环控制元件,在现代工业自动化、精密测量、机器人技术等领域中扮演着举足轻重的角色。步进电机的驱动方法直接决定了其运动精度、稳定性和响应速度。本文将详细探讨步进电机的几种主要驱动方法,并通过分点表示和归纳,力求为读者提供清晰、全面的信息。
二、步进电机驱动方法概述
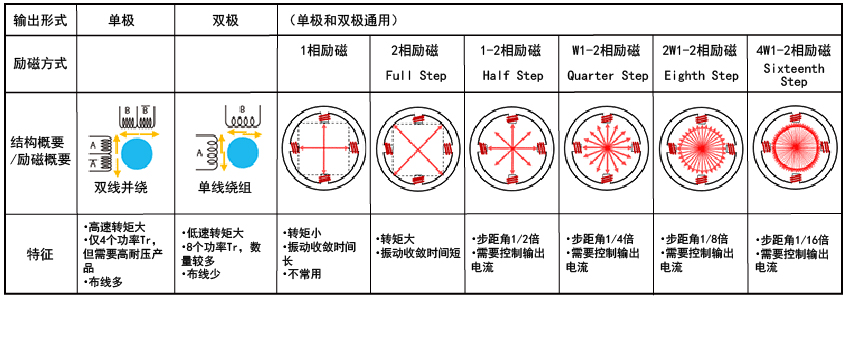
步进电机的驱动方法主要包括全步进驱动、半步进驱动、微步进驱动等。这些方法通过不同的电流控制策略,实现对步进电机转动角度和速度的精确控制。
三、全步进驱动
定义与原理
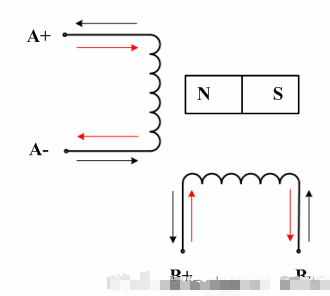
全步进驱动是步进电机最常见的驱动方式之一。它通过改变电流的方向和大小,使步进电机按照设定的步距角进行旋转。全步进驱动包括单相全步进驱动和双相全步进驱动两种形式。
单相全步进驱动:在单相全步进驱动中,通过向两个相邻线圈施加电流,使得步进电机转动一个步进角度。该驱动方式简单易实现,但转矩较小。
双相全步进驱动:双相全步进驱动是一种更为常见的驱动方式。它通过按照特定的顺序向两个线圈施加电流,实现步进电机的转动。这种驱动方式相比单相全步进驱动具有更高的转矩和更稳定的运行。
特点与应用
全步进驱动方式简单直观,适用于对转矩要求不高的场合。由于其转矩相对较小,因此在需要高精度定位和控制的场合中,可能需要结合其他驱动方式使用。
四、半步进驱动
定义与原理
半步进驱动是介于全步进驱动和微步进驱动之间的一种驱动方式。它通过改变电流的方向和大小,使步进电机按照半个步距角进行旋转。半步进驱动同样包括单相和双相两种形式。
工作原理
在双相半步进驱动中,首先向一个线圈施加电流,使步进电机转动半个步进角度;然后再向另一个线圈施加电流,使步进电机再次转动半个步进角度。通过交替改变电流的方向和大小,可以实现精确的定位。
特点与应用
半步进驱动方式相比全步进驱动方式具有更高的分辨率和更平滑的运动。它适用于对定位要求较高的场合,如精密测量、机器人控制等。
五、微步进驱动
定义与原理
微步进驱动是步进电机中最精细的驱动方式。它通过分段控制电流的大小和方向,使步进电机按照更小的微步角度进行旋转。微步进驱动可以实现更高的分辨率和更平滑的运动。
工作原理
微步进驱动将每个步进角度细分为更小的微步角度。通过控制电流的大小和方向,可以使步进电机按照微步角度进行转动。这种驱动方式在定位精度和运动平稳性方面优于全步进和半步进驱动。
特点与应用
微步进驱动方式适用于对定位精度要求极高的场合,如高精密仪器、光学设备等。其高精度和平滑运动的特性使得步进电机在这些领域中得到了广泛应用。
六、其他驱动方法
除了上述三种主要的驱动方法外,步进电机还有四拍驱动、八拍驱动等驱动方式。这些驱动方式通过改变电流的分配和时序,实现对步进电机运动状态的精确控制。在实际应用中,可以根据具体需求和条件选择合适的驱动方法。
七、总结
本文详细介绍了步进电机的三种主要驱动方法:全步进驱动、半步进驱动和微步进驱动。这些驱动方法通过不同的电流控制策略,实现对步进电机转动角度和速度的精确控制。在实际应用中,应根据具体需求和条件选择合适的驱动方法,以确保步进电机的正常运行和精确控制。同时,随着技术的不断发展,步进电机的驱动方法也将不断更新和完善,为工业自动化和精密控制领域带来更多可能性。
-
线圈
+关注
关注
14文章
1820浏览量
44428 -
机器人
+关注
关注
211文章
28379浏览量
206912 -
步进电机
+关注
关注
150文章
3109浏览量
147443
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论