 伺服驱动器过载时间是累计的吗
伺服驱动器过载时间是累计的吗
伺服驱动器过载时间是否累计,这个问题需要从伺服驱动器的工作原理、过载保护机制以及实际应用场景等方面进行详细分析。
伺服驱动器是一种高精度、高响应速度的电机驱动装置,广泛应用于工业自动化、机器人、数控机床等领域。伺服驱动器的核心功能是接收控制器的指令信号,精确控制电机的转速、位置和力矩,以实现对机械设备的精确控制。在实际应用中,伺服驱动器需要承受各种负载变化和环境影响,因此其过载保护功能至关重要。
一、伺服驱动器的工作原理
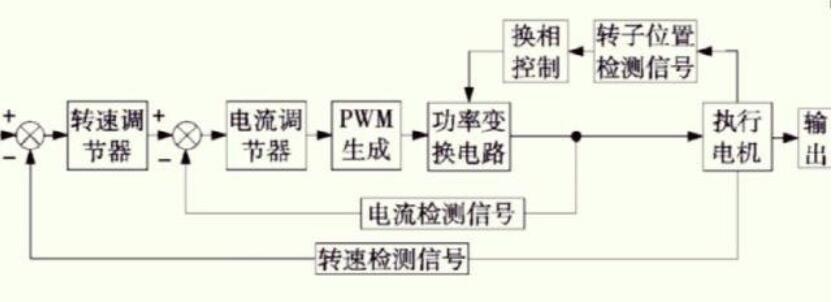
伺服驱动器主要由功率模块、控制模块和接口模块组成。功率模块负责将输入的电能转换为电机所需的电能,控制模块负责接收控制器的指令信号并生成相应的控制信号,接口模块则负责与外部设备进行通信和数据交换。
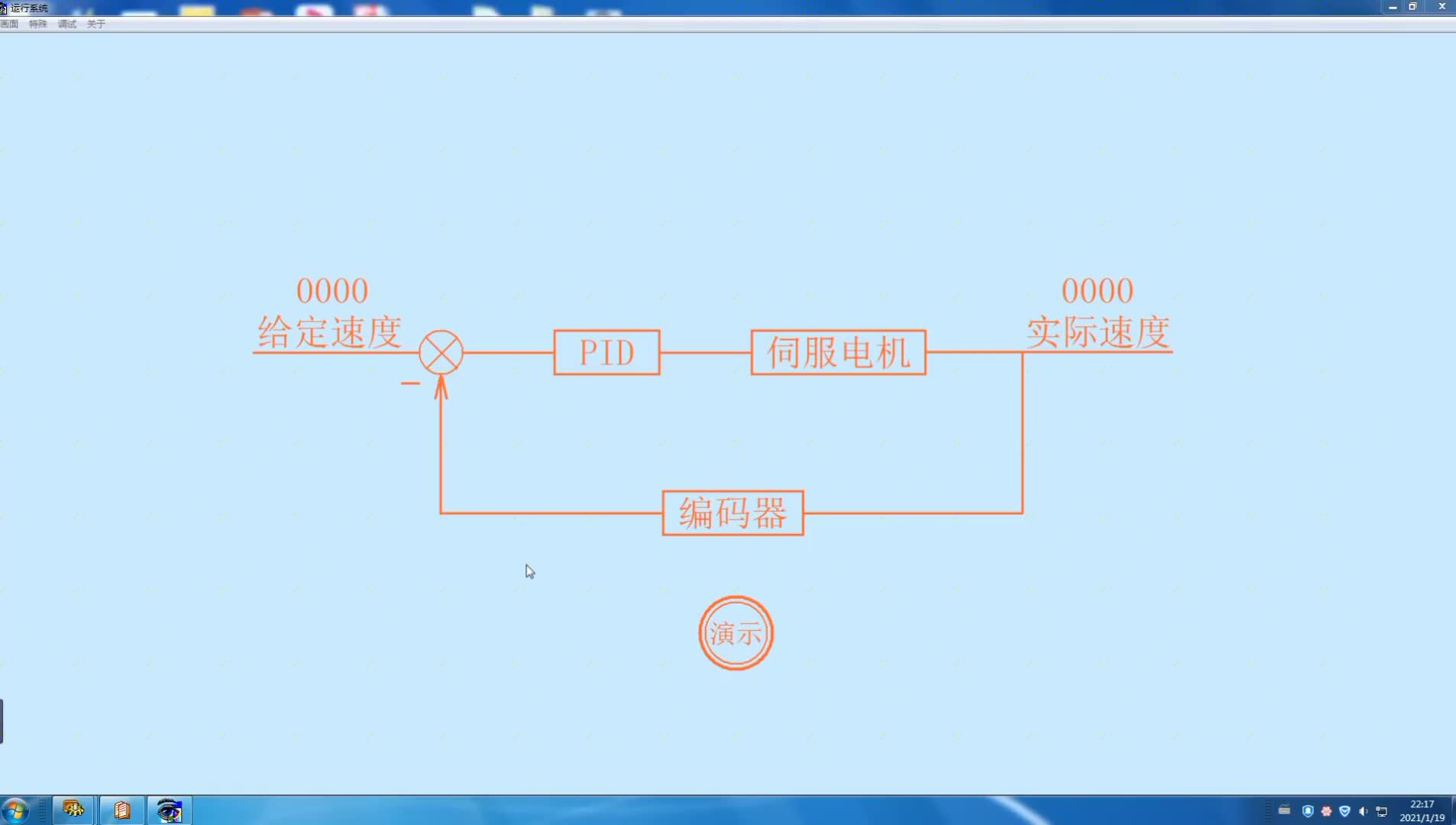
伺服驱动器的工作原理可以概括为以下几个步骤:
- 控制器发送指令信号给伺服驱动器,指令信号包括速度、位置和力矩等信息。
- 伺服驱动器的控制模块接收指令信号,并根据指令信号计算出所需的电机控制参数。
- 控制模块将计算出的控制参数传递给功率模块,功率模块根据控制参数调整电机的供电电压和电流。
- 电机根据功率模块提供的电压和电流进行运动,实现对机械设备的精确控制。
- 伺服驱动器通过接口模块与控制器进行实时通信,反馈电机的实际运行状态。
二、伺服驱动器的过载保护机制
伺服驱动器在运行过程中,可能会遇到各种过载情况,如负载突然增大、电源电压波动等。为了保护伺服驱动器和电机不受损坏,伺服驱动器通常具备过载保护功能。过载保护机制主要包括以下几个方面:
- 电流检测:伺服驱动器实时监测电机的电流,当电流超过设定的过载电流阈值时,触发过载保护。
- 温度检测:伺服驱动器内部的功率模块和电机在运行过程中会产生热量,当温度超过设定的安全阈值时,触发过载保护。
- 电压检测:伺服驱动器实时监测电源电压,当电压超过设定的安全范围时,触发过载保护。
- 速度检测:伺服驱动器实时监测电机的运行速度,当速度超过设定的最大速度阈值时,触发过载保护。
三、伺服驱动器过载时间的累计问题
伺服驱动器在过载保护触发后,通常会采取一定的措施,如降低电机的运行速度、减小电机的力矩输出等,以减轻过载对伺服驱动器和电机的影响。在某些情况下,伺服驱动器的过载时间是会累计的,但这主要取决于过载保护的具体实现方式和应用场景。
- 累计过载时间的实现方式:在某些伺服驱动器中,过载保护功能会记录每次过载事件的发生时间和持续时间。当过载时间累计达到设定的阈值时,伺服驱动器会采取更严格的保护措施,如停机、报警等。
- 累计过载时间的应用场景:在一些对设备稳定性和可靠性要求较高的应用场景中,如高精度加工、机器人操作等,累计过载时间的监控和处理尤为重要。通过累计过载时间,可以及时发现伺服驱动器和电机的异常情况,避免设备损坏和生产事故。
四、如何优化伺服驱动器的过载保护
为了提高伺服驱动器的稳定性和可靠性,减少过载对设备的影响,可以采取以下几种措施优化过载保护:
- 合理设置过载保护参数:根据实际应用场景和设备性能,合理设置过载电流、温度、电压和速度等保护参数,避免过载保护过于敏感或过于宽松。
- 增强伺服驱动器的散热性能:通过优化伺服驱动器的散热设计,提高功率模块和电机的散热效率,降低过载时的温度上升速度。
- 提高电源稳定性:通过使用稳压电源、滤波器等设备,提高伺服驱动器的电源稳定性,减少电源波动对过载保护的影响。
- 增加过载保护的智能化:通过引入先进的算法和传感器技术,实现过载保护的自适应调整和智能诊断,提高过载保护的准确性和响应速度。
五、总结
伺服驱动器过载时间是否累计,取决于过载保护的具体实现方式和应用场景。在一些对设备稳定性和可靠性要求较高的应用场景中,累计过载时间的监控和处理尤为重要。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
过载保护
+关注
关注
1文章
128浏览量
12579 -
工业自动化
+关注
关注
17文章
2472浏览量
67368 -
伺服驱动器
+关注
关注
22文章
488浏览量
31752
发布评论请先 登录
相关推荐

伺服驱动器的工作原理_伺服驱动器内部结构
伺服驱动器在控制信号的作用下驱动执行电机,因此驱动器是否能正常工作直接影响设备的整体性能。在伺服控制系统中,
伺服驱动器的作用与原理、应用领域
伺服驱动器作为自动化设备的核心部件之一,其作用和原理对于理解自动化设备的工作原理具有重要意义。本文将为您详细介绍伺服驱动器的作用与原理。 一、伺服
伺服驱动器过载保护怎么调
引言 伺服驱动器作为一种高性能的电机驱动装置,广泛应用于工业自动化、机器人、数控机床等领域。在实际应用过程中,伺服驱动器可能会因为负载过大、
伺服驱动器一上电就报过载解决方法
伺服驱动器在工业自动化领域中扮演着至关重要的角色,它负责接收控制器的指令并驱动电机按照预定的速度和位置进行运动。然而,伺服
伺服过载报警调什么参数好
伺服过载报警是伺服系统在运行过程中出现的一种常见故障,它通常意味着伺服电机或驱动器承受了超过其额定负载的力矩,从而导致系统无法正常工作。为了解决这个问题,我们需要对
伺服驱动器一上电就报过载解决方法及具体案例
伺服驱动器在工业自动化领域中扮演着至关重要的角色,它负责接收控制器的指令并驱动电机按照预定的速度和位置进行运动。然而,伺服
伺服驱动器需要设置哪些参数
伺服驱动器是一种用于控制伺服电机的设备,它可以接收来自控制器的指令,并将指令转换为电机的转速、位置和扭矩等参数。为了使伺服
伺服驱动器和伺服电机介绍
在工业自动化和精密控制领域,伺服系统扮演着至关重要的角色。与传统的变频技术相比,伺服系统具备更精确的控制能力和更高的性能水平。 一、驱动器 伺服驱动





 工商网监
工商网监
评论