 0 基础,0 难度,安信可Rd-03上位机配置教程
0 基础,0 难度,安信可Rd-03上位机配置教程
Rd-03是安信可科技开发的雷达模组,搭载矽典微的S3KM1110芯片。S3KM1110 是一种基于FMCW雷达收发器技术的集成单片机毫米波传感器SoC。它工作在24GHz的K 波段,每个单频扫描的调制带宽高达1GHz。利用FMCW调频连续波,对设定空间内的目标进行探测。结合雷达信号处理,实现高灵敏度的运动检测和微动检测。
Rd-03 模组可感知区域内是否有运动或者微动的人体,实现实时检测结果。提供可视化的配置工具,可轻松配置感应距离范围、不同区间的感应灵敏度和无人延时时间等。
为了方便大家直接上手 Rd-03,今天带来这篇上位机配置教程,0 基础入门,0 难度配置,看完这篇有手就会。
01软硬件准备
硬件准备
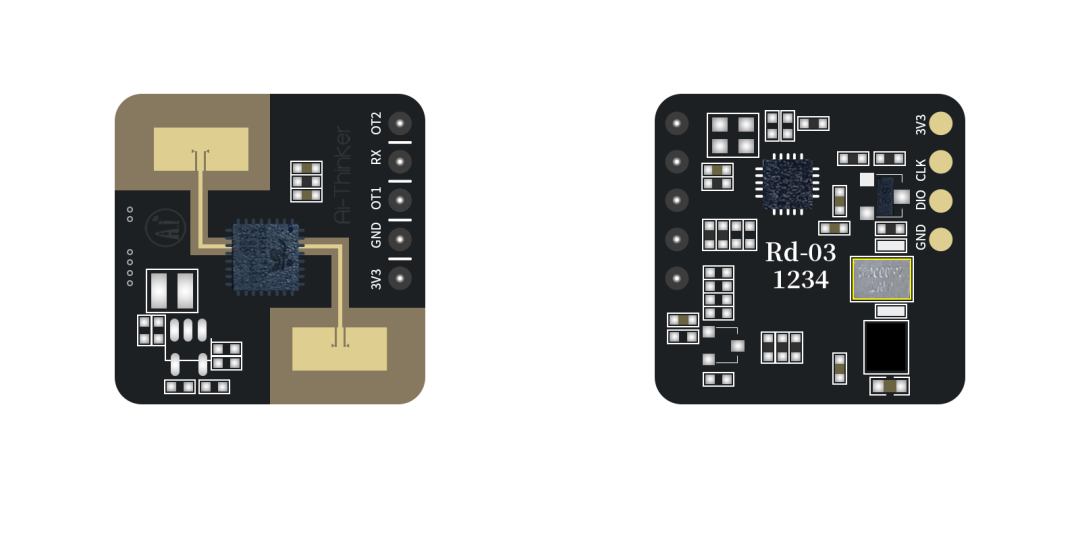
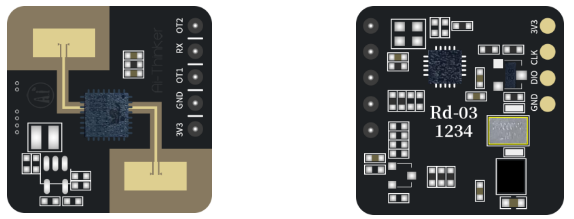
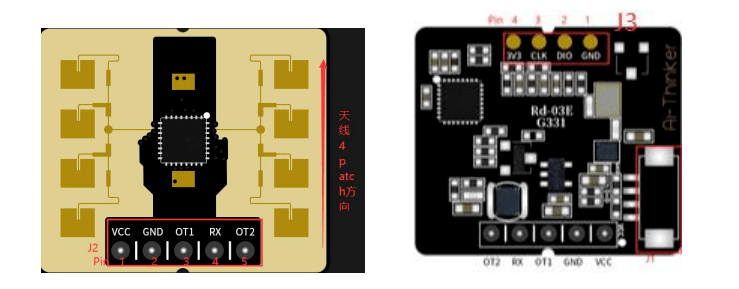
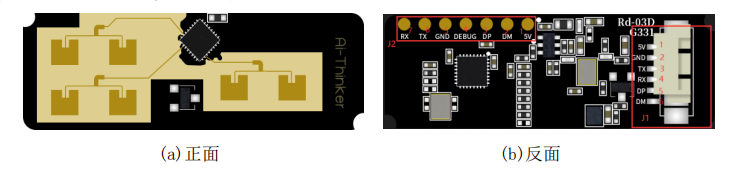
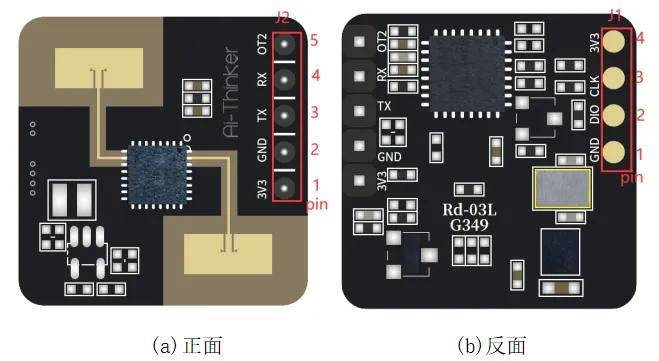
外观展示——Rd-03
软件准备
Rd-03 可视化配置工具(上位机)
Rd-03 模组说明书:https://docs.ai-thinker.com/_media/rd-03_v1.0.0%E6%A8%A1%E7%BB%84%E8%AF%B4%E6%98%8E%E4%B9%A6.pdf
其它资料:https://docs.ai-thinker.com/rd-03
02雷达安装与上位机配置
雷达安装
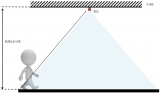
雷达具有两种安装方式,挂壁和挂顶安装。这里附上安装示意图。
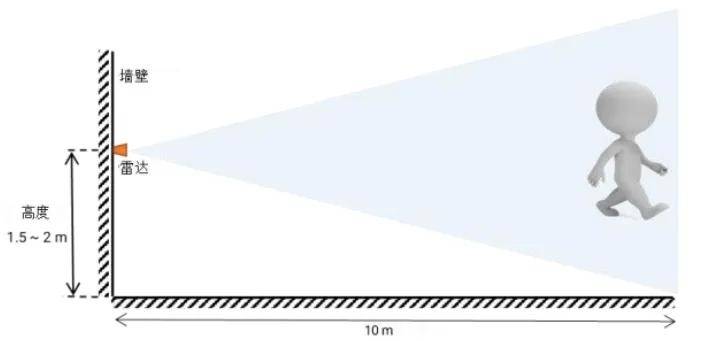
安装最主要的是雷达一定要固定,自身不能有晃动,以及屏蔽一些金属的干扰。
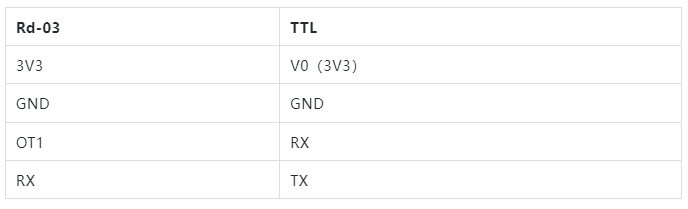
雷达配置
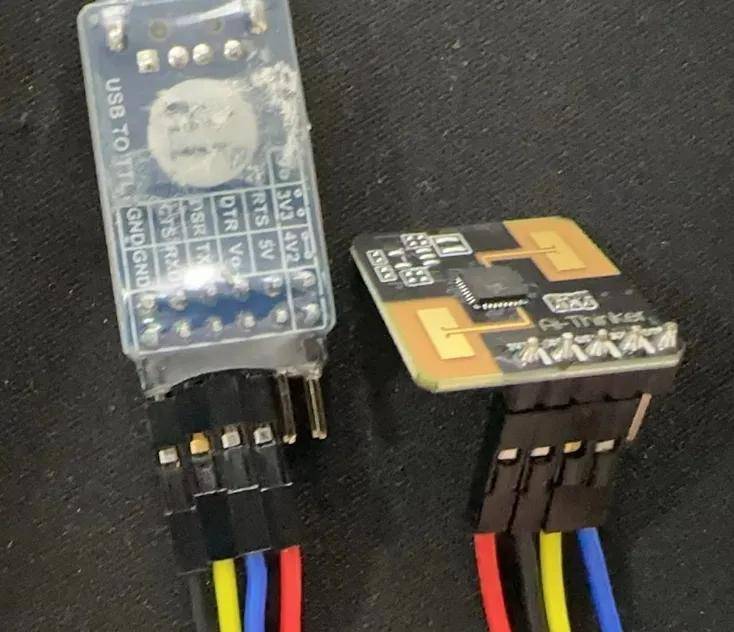
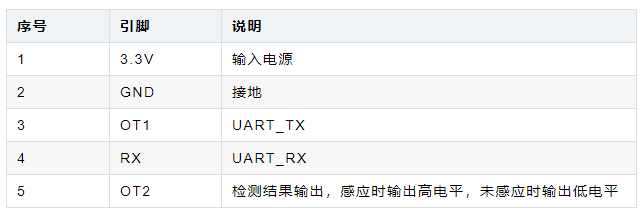
首先当然是用 TTL 工具连接我们的 Rd-03,接线方式如下:
然后带着电脑和 Rd-03,先固定雷达并将天线朝向检测的环境(无人状态)。

打开上位机,部分电脑可能会报错,如果是杀毒软件报错添加白名单即可。点击 Accept。
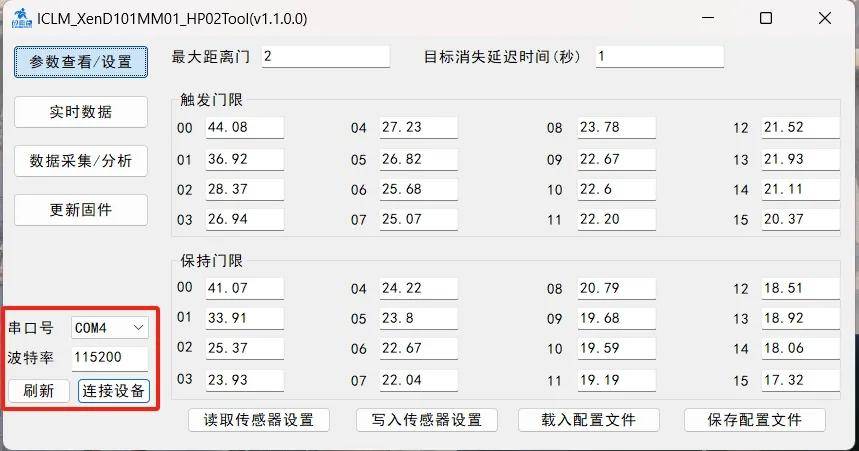
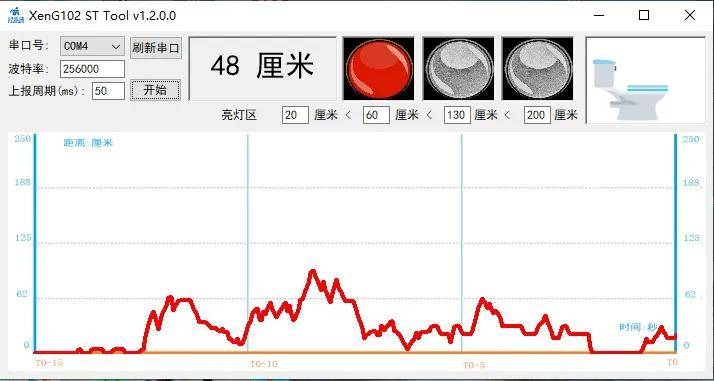
可以看到上位机界面,直接点击左下角的刷新,确定好端口号和波特率(115200),点击连接设备。
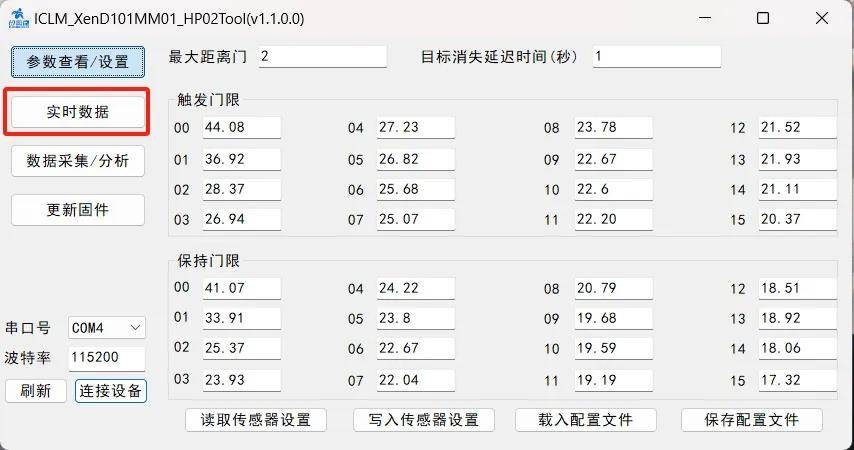
连接成功后,直接点击左侧的“实时数据”。
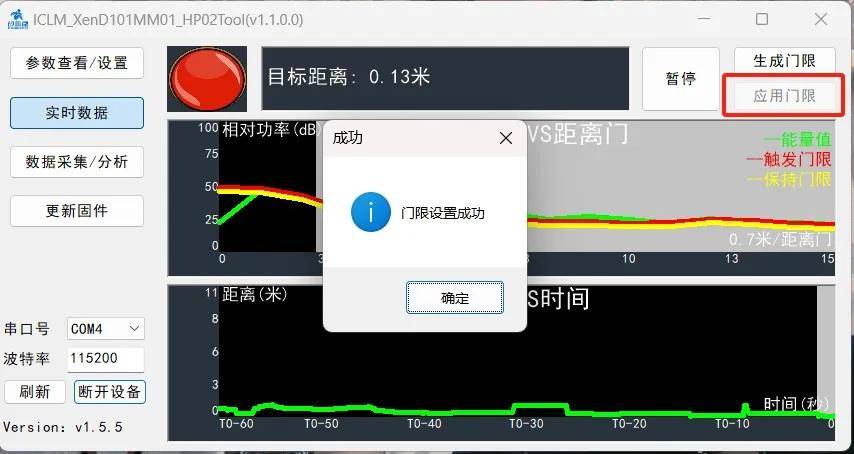
可以看到这个界面下有三个按钮,“开始”,“生成门限”,“应用门限”。然后确认 Rd-03 固定并且朝向要检测的环境。点击“生成门限”(如果是暗的无法点击,点击“开始”后就可以点了)。
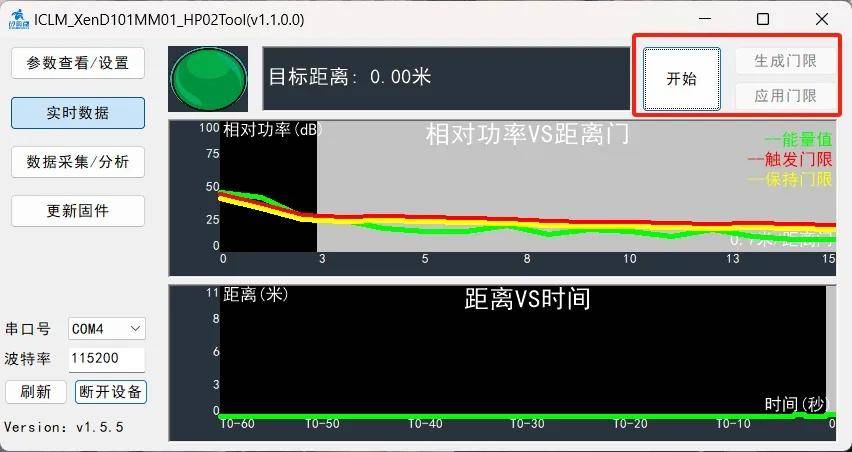
生成门限的过程会有 20 秒的扫描时间,耐心等待一下,生成之后点击确定,之后点击“应用门限”。这样我们的 Rd-03 就已经扫描完检测环境并将数据写入了。


接下来只要回到我们的“参数查看/设置”界面,修改“最大距离门”和“目标消失延迟时间”。
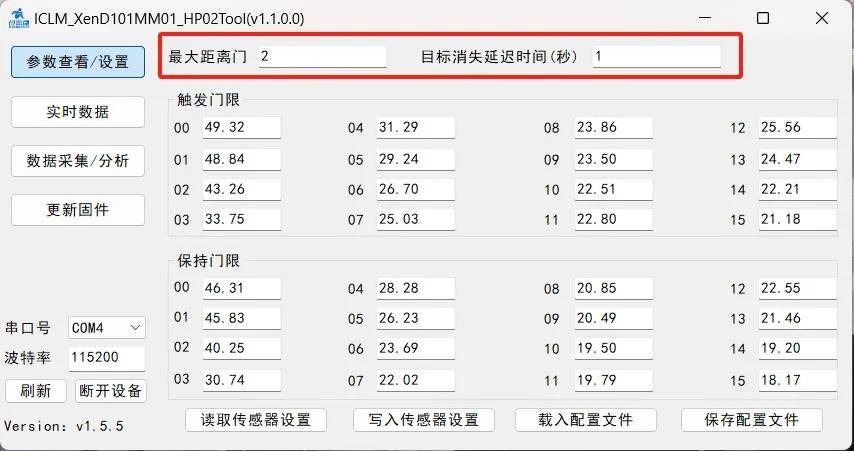
这两个配置选项,故名思意就是修改检测的最大距离和目标触发后持续的状态时间。距离门的概念其实就是一个单位,一个距离门是 0.7 米,最大 15 个距离门也就是 10.5 米。目标消失延迟时间就是,雷达在范围内触发后会持续处于“激发”状态,这个持续的时间,如果在期间持续被触发的话也会重置这个时间。大家可以根据需要检测的范围自行设置。
现在Rd-03 就已经配置完了,最后可以看到 OT2 的引脚,这个是一个高低电平的输入输出 IO 口,当有人时输出高电平,无人时输出低电平。
注意:上位机和 OT2 不能同时用,当连接上位机的时候 OT2 的电平输出状态会锁定。
审核编辑 黄宇
-
雷达
+关注
关注
50文章
2930浏览量
117475 -
上位机
+关注
关注
27文章
942浏览量
54793
发布评论请先 登录
相关推荐
安信可新品雷达模组Rd-03搭配STM32制作简易人体感应雷达灯教程
安信可高性价比24G人体存在感应雷达模组Rd-03即将面世
高精度识别人体微动、运动!安信可Ai-Thinker24G人体感应雷达模组 Rd-03 重磅首发
低至1元!安信可推出10G雷达模组Rd-04,支持感应人体微动/运动

安信可推出10G雷达模组Rd-04,支持感应人体微动/运动
基于安信可Rd-03+STM32制作人体检测雷达灯

一分钟上手安信可雷达模组Rd-03


安信可新款雷达模组Rd-03E精准测距效果
STM32驱动安信可Rd-03D,实现不同角度点亮不同LED灯
安信可雷达系列的超低功耗人体存在毫米波传感器—Rd-03L
安信可Rd-03L检测使用—— 超低功耗实现人体存在检测,上位机配置快速上手
【雷达灯控】安信可 Rd-03E+ 灯 + Ai-M61
告别接线!手机一键调参,Rd-Kit雷达蓝牙底板,让雷达模组使用更简单





 工商网监
工商网监
评论