 步进电机步进驱动器计算方法
步进电机步进驱动器计算方法
步进电机是一种将电脉冲信号转换为机械角位移的执行元件,广泛应用于自动化设备、机器人、打印机等领域。步进电机驱动器是步进电机的控制装置,负责接收控制信号并驱动步进电机按照预定的步数和方向进行运动。本文将详细介绍步进电机驱动器的计算方法。
- 步进电机的基本原理
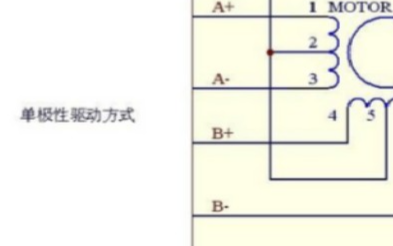
步进电机是一种电磁式电机,其工作原理是利用电磁力的作用使转子产生角位移。步进电机主要由定子和转子两部分组成。定子上有多个绕组,通过改变绕组的电流方向和大小,产生不同的磁场,从而驱动转子转动。转子上有多对磁极,与定子上的磁场相互作用,使转子产生角位移。
步进电机的角位移与输入的脉冲信号成正比,即每输入一个脉冲信号,转子就转动一个步距角。步距角是步进电机的基本参数,通常以度为单位,如1.8度、0.9度等。
- 步进电机的分类
根据步距角的大小,步进电机可分为以下几类:
- 大步距角步进电机:步距角在1.8度以上,如2.5度、3.3度等。
- 中步距角步进电机:步距角在1.8度以下,如1.5度、1.2度等。
- 小步距角步进电机:步距角在0.9度以下,如0.72度、0.36度等。
- 步进电机驱动器的基本原理
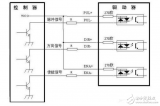
步进电机驱动器的主要功能是接收控制信号,根据控制信号的要求,对步进电机的绕组进行控制,从而实现步进电机的精确控制。步进电机驱动器的基本原理如下:
- 脉冲输入:驱动器接收来自控制器的脉冲信号,脉冲信号的数量决定了步进电机转动的步数。
- 方向控制:驱动器接收来自控制器的方向信号,方向信号决定了步进电机的转动方向。
- 电流控制:驱动器根据步进电机的参数和控制要求,对绕组的电流进行控制,以实现步进电机的精确控制。
- 步进电机驱动器的计算方法
步进电机驱动器的计算主要包括以下几个方面:
4.1 脉冲数的计算
脉冲数是控制步进电机转动的基本参数,其计算公式为:
脉冲数 = 目标角位移 / 步距角
其中,目标角位移是步进电机需要转动的角度,步距角是步进电机的基本参数。
例如,如果步进电机的步距角为1.8度,需要转动90度,则脉冲数为:
脉冲数 = 90 / 1.8 = 50
4.2 电流的计算
步进电机的电流直接影响其输出力矩和效率。电流的计算需要考虑步进电机的额定电流、最大电流和实际工作电流等因素。
电流的计算公式为:
实际电流 = 额定电流 × (实际负载 / 最大负载)
其中,额定电流是步进电机在正常工作条件下的电流,最大负载是步进电机在最大负载下的工作状态。
例如,如果步进电机的额定电流为2A,最大负载为10Nm,实际负载为5Nm,则实际电流为:
实际电流 = 2 × (5 / 10) = 1A
4.3 驱动器功率的计算
驱动器的功率决定了其能够驱动步进电机的能力。驱动器功率的计算公式为:
功率 = 电流 × 电压
其中,电流是步进电机的实际工作电流,电压是驱动器的输入电压。
例如,如果步进电机的实际电流为1A,驱动器的输入电压为24V,则驱动器的功率为:
功率 = 1 × 24 = 24W
4.4 驱动器的选型
根据步进电机的参数和实际工作要求,选择合适的驱动器。驱动器的选型需要考虑以下几个方面:
- 驱动能力:驱动器的驱动能力应满足步进电机的额定电流和最大电流要求。
- 控制方式:驱动器的控制方式应与控制器的输出方式相匹配,如脉冲+方向、模拟信号等。
- 接口类型:驱动器的接口类型应与控制器的接口类型相匹配,如并口、串口等。
- 尺寸和安装方式:驱动器的尺寸和安装方式应满足实际应用的需求。
- 结论
步进电机驱动器的计算方法主要包括脉冲数的计算、电流的计算、驱动器功率的计算和驱动器的选型。在实际应用中,需要根据步进电机的参数和实际工作要求,进行合理的计算。
-
驱动器
+关注
关注
52文章
8226浏览量
146251 -
机械
+关注
关注
8文章
1570浏览量
40523 -
打印机
+关注
关注
10文章
768浏览量
45659 -
步进电机
+关注
关注
150文章
3109浏览量
147443
发布评论请先 登录
相关推荐
步进电机特性是什么?步距角计算方法有哪几种
步进电机及驱动器连接_步进电机驱动器接法_步进电机驱动器怎么调






 工商网监
工商网监
评论