 plc控制伺服驱动器编程实例介绍
plc控制伺服驱动器编程实例介绍
在现代工业自动化领域,可编程逻辑控制器(PLC)和伺服驱动器的组合应用非常广泛。PLC 控制伺服驱动器可以实现精确的速度、位置和力矩控制,广泛应用于机械手、输送带、数控机床等多种自动化设备。本文将详细介绍 PLC 控制伺服驱动器的编程实例。
1. 伺服驱动器与 PLC 的基本概念
伺服驱动器 :伺服驱动器是一种将电信号转换为机械运动的装置,通常用于精确控制电机的速度、位置和力矩。
PLC :可编程逻辑控制器(Programmable Logic Controller)是一种用于工业自动化控制的数字操作电子系统,具有高度的可靠性、灵活性和易用性。
2. 系统组成
一个典型的 PLC 控制伺服驱动器系统通常包括以下部分:
- PLC :作为控制系统的大脑,负责接收输入信号、处理逻辑并输出控制信号。
- 伺服驱动器 :接收 PLC 的控制信号,驱动伺服电机实现精确运动。
- 伺服电机 :执行机构,根据伺服驱动器的指令进行运动。
- 传感器 :用于检测系统状态,如位置、速度等,并将信息反馈给 PLC。
3. 通信协议
在 PLC 和伺服驱动器之间进行通信时,通常使用以下几种协议:
4. PLC 编程基础
在进行 PLC 控制伺服驱动器编程之前,需要了解以下基本概念:
5. 编程实例
5.1 系统需求
假设我们需要控制一个简单的直线运动平台,使其能够根据 PLC 的指令在两个固定位置之间移动。
5.2 硬件配置
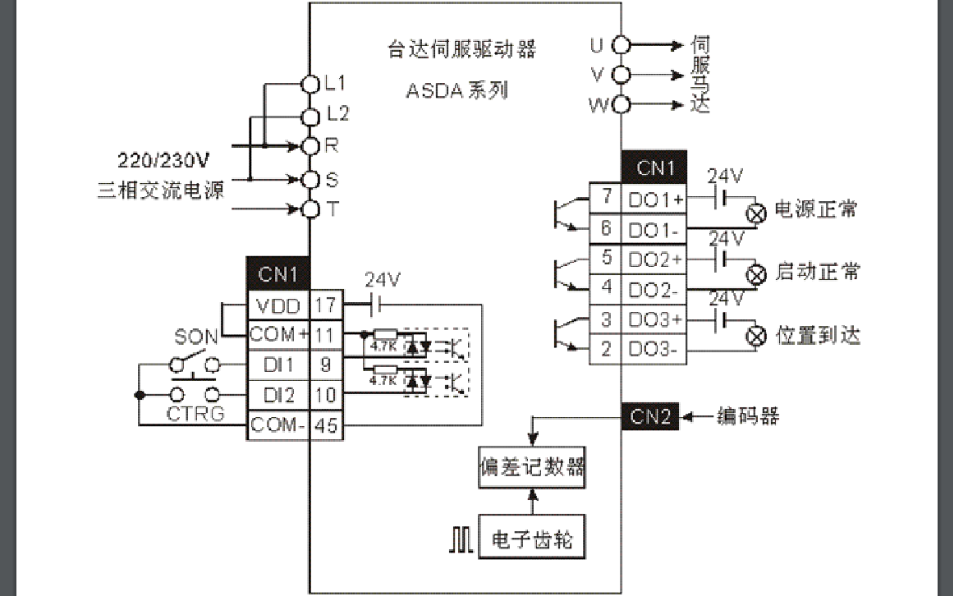
5.3 接线
- 将伺服驱动器的控制信号线连接到 PLC 的输出端口。
- 将传感器的信号线连接到 PLC 的输入端口。
5.4 编程步骤
- 初始化 :设置 PLC 的输入/输出端口,初始化寄存器和变量。
- 定义常量和变量 :
- 定义两个位置的编码值:
POS1和POS2。 - 定义当前位置变量:
currentPos。
- 主控制逻辑 :
- 使用一个按钮或传感器信号作为启动条件。
- 读取传感器信号,更新
currentPos。 - 根据
currentPos与POS1、POS2的比较结果,计算目标位置。
- 运动控制 :
- 发送目标位置到伺服驱动器。
- 使用 PLC 的定时器监控运动状态,确保到达目标位置。
- 异常处理 :
- 检测伺服驱动器的状态,处理可能的故障。
- 优化和调试 :
- 根据实际运行情况调整参数,如加速度、减速度等。
- 调试程序,确保系统稳定运行。
6. 编程示例代码(伪代码)
// 初始化
init_plc();
init_servo_driver();
// 主循环
while (true) {
// 读取输入
read_inputs();
// 更新当前位置
currentPos = read_position_sensor();
// 判断目标位置
if (currentPos != POS1 && currentPos != POS2) {
// 计算目标位置
targetPos = decide_target_position(currentPos);
// 发送目标位置到伺服驱动器
send_position_to_servo_driver(targetPos);
// 监控运动状态
monitor_motion_status();
}
// 异常处理
check_for_errors();
// 延时等待下一个循环
wait_for_next_cycle();
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
PLC控制
+关注
关注
9文章
251浏览量
27427 -
编程
+关注
关注
88文章
3647浏览量
94206 -
机械手
+关注
关注
7文章
341浏览量
29825 -
伺服驱动器
+关注
关注
22文章
495浏览量
31926
发布评论请先 登录
相关推荐


PLC与伺服驱动器、负载的关系
已知伺服驱动器Pm=10000Pulse/r,PLC控制器发出的频率f (puls/s),如何计算负载轴的转速n(r/s),
伺服驱动器A、B、C相脉冲输出有什么作用?怎么与plc连接?
伺服驱动器A、B、C相脉冲输出的作用及与PLC的连接方式 伺服驱动器是一种常用的电气设备,用于控制
PLC控制伺服驱动器的主要方式
在工业自动化领域中,伺服驱动器作为控制伺服电机运行的关键设备,其性能的稳定性和控制精度对于整个生产线的运行效率具有重要影响。而
伺服驱动器和伺服电机介绍
在工业自动化和精密控制领域,伺服系统扮演着至关重要的角色。与传统的变频技术相比,伺服系统具备更精确的控制能力和更高的性能水平。 一、驱动器





 工商网监
工商网监
评论