 can转485数据是如何对应的
can转485数据是如何对应的
CAN(Controller Area Network)是一种用于汽车和工业控制系统的局域网技术,它具有高可靠性、实时性和灵活性。而RS-485是一种串行通信协议,常用于长距离通信和多点通信。将CAN总线数据转换为RS-485数据,可以方便地实现不同通信协议之间的数据交换。
本文将详细介绍CAN转485数据的对应关系,包括CAN总线和RS-485通信原理、数据格式、转换方法和应用实例等方面的内容。
- CAN总线通信原理
1.1 CAN总线概述
CAN总线是一种基于时间分割的通信协议,它采用非破坏性仲裁机制来解决多个节点同时发送数据时的冲突问题。CAN总线具有以下特点:
- 高可靠性:CAN总线具有错误检测和错误处理机制,可以保证数据传输的可靠性。
- 实时性:CAN总线采用时间分割机制,可以保证数据传输的实时性。
- 灵活性:CAN总线支持多种通信速率和通信距离,可以适应不同的应用场景。
1.2 CAN总线数据传输过程
CAN总线的数据传输过程包括以下几个步骤:
- 帧起始:发送节点发送一个帧起始信号,表示数据传输开始。
- 仲裁场:发送节点发送仲裁场,用于确定数据传输的优先级。
- 控制场:发送节点发送控制场,包括数据长度和远程传输请求标志。
- 数据场:发送节点发送数据场,包含实际传输的数据。
- CRC校验:发送节点发送CRC校验码,用于检测数据传输过程中的错误。
- 应答场:接收节点发送应答信号,表示数据已成功接收。
- 帧结束:发送节点发送帧结束信号,表示数据传输结束。
- RS-485通信原理
2.1 RS-485概述
RS-485是一种差分信号的串行通信协议,它具有以下特点:
- 长距离通信:RS-485可以支持长达1200米的通信距离。
- 多点通信:RS-485支持多个节点同时通信,实现多点通信。
- 抗干扰性:RS-485采用差分信号,具有较强的抗干扰能力。
2.2 RS-485数据传输过程
RS-485的数据传输过程包括以下几个步骤:
- 起始位:发送节点发送一个起始位,表示数据传输开始。
- 数据位:发送节点发送数据位,包含实际传输的数据。
- 奇偶校验位:发送节点发送奇偶校验位,用于检测数据传输过程中的错误。
- 停止位:发送节点发送停止位,表示数据传输结束。
- CAN转485数据格式
3.1 CAN数据格式
CAN数据格式包括以下几个部分:
- 帧起始:1位
- 仲裁场:11位(标准帧)或29位(扩展帧)
- 控制场:6位
- 数据场:0~64位
- CRC校验:15位
- 应答场:2位
- 帧结束:7位
3.2 RS-485数据格式
RS-485数据格式包括以下几个部分:
- 起始位:1位
- 数据位:8位
- 奇偶校验位:1位
- 停止位:1位或2位
- CAN转485转换方法
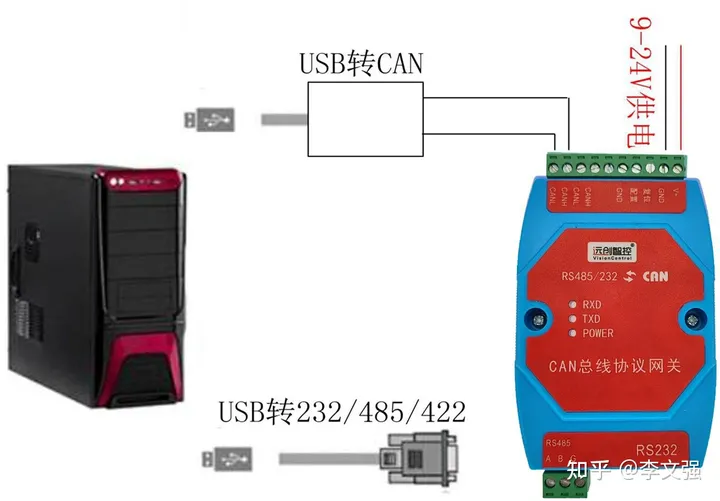
4.1 硬件转换
硬件转换是指通过硬件设备将CAN总线数据转换为RS-485数据。常见的硬件转换设备有CAN转RS-485转换器、CAN-RS-485网关等。硬件转换的优点是实现简单,稳定性高,但成本较高。
4.2 软件转换
软件转换是指通过编写程序将CAN总线数据转换为RS-485数据。软件转换的优点是成本低,灵活性高,但实现复杂,稳定性相对较低。
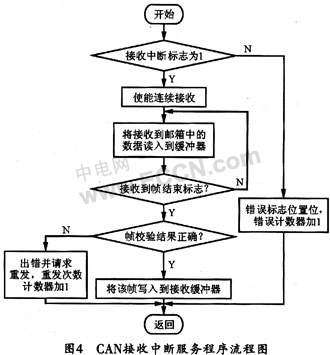
4.3 转换流程
CAN转485的转换流程如下:
- 接收CAN总线数据:首先,需要接收CAN总线上的数据。
- 解析CAN数据:对接收的CAN数据进行解析,提取出数据场、控制场等信息。
- 转换数据格式:将解析出的CAN数据转换为RS-485数据格式,包括起始位、数据位、奇偶校验位和停止位。
- 发送RS-485数据:将转换后的RS-485数据通过RS-485通信接口发送出去。
- 应用实例
5.1 工业自动化
在工业自动化领域,CAN总线和RS-485通信协议都有广泛的应用。通过CAN转485转换器,可以实现工业设备之间的数据交换和协同工作,提高生产效率。
5.2 汽车电子
在汽车电子领域,CAN总线是主要的通信协议。通过CAN转485转换器,可以将汽车内部的CAN总线数据转换为RS-485数据,实现与其他电子设备的通信。
-
CAN
+关注
关注
57文章
2756浏览量
463861 -
局域网
+关注
关注
5文章
755浏览量
46303 -
485
+关注
关注
0文章
73浏览量
32872 -
工业控制系统
+关注
关注
3文章
110浏览量
16596
发布评论请先 登录
相关推荐
Link-Max CAN转485/CAN转232智能型CAN转串口转换网桥
有关UART转CAN
基于CAN/RS485双层网络的远程抄表系统设计
基于PIC18单片机的CAN RS485转换器的设计
网口转can口工具如何实现CAN总线数据
智嵌物联CAN转串口RS485 RS232使用说明

CAN接口与485接口如何实现互相转换?
CAN现场总线转RS485/232 智能协议网关
Profinet转485modbus网关解决传输距离及数据丢失问题






 工商网监
工商网监
评论