 工业机器人控制柜的组成有哪些
工业机器人控制柜的组成有哪些
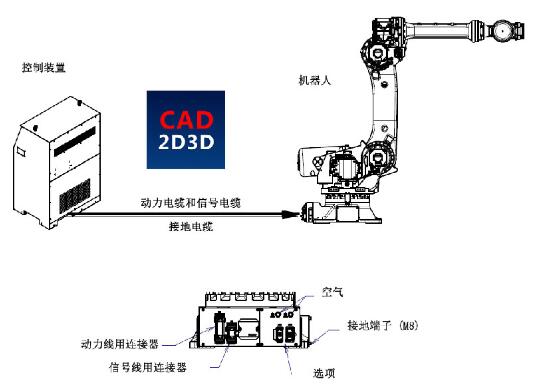
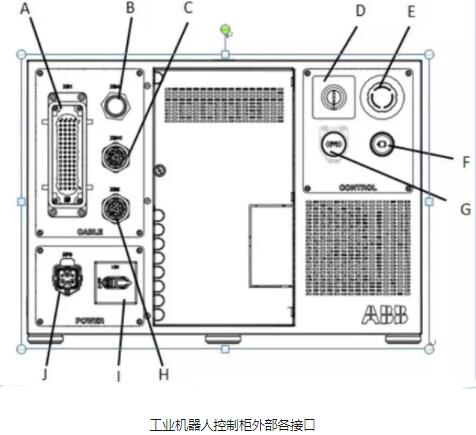
工业机器人控制柜是工业机器人系统的核心组成部分,它负责接收操作者或自动化系统的指令,控制机器人的运动和工作。控制柜的设计和制造对于机器人的性能、稳定性和可靠性至关重要。本文将详细介绍工业机器人控制柜的组成,包括硬件和软件两个方面。
一、硬件组成
电源模块是控制柜的能源供应部分,它负责将输入的交流电转换为机器人所需的直流电。电源模块通常包括整流器、滤波器、稳压器和保护电路等。整流器将交流电转换为脉动直流电,滤波器消除脉动直流电中的纹波,稳压器保证输出电压的稳定,保护电路则在电源模块出现异常时进行保护。
控制器是控制柜的核心部件,它负责接收操作者或自动化系统的指令,计算机器人的运动轨迹和速度,控制机器人的各个关节和执行器。控制器通常包括主控制器、运动控制器和I/O接口等。主控制器负责处理高级指令和协调各个子系统的工作,运动控制器负责实现机器人的运动控制,I/O接口则负责与外部设备进行通信。
驱动器是控制柜的动力输出部分,它负责将控制器的指令转换为机器人各个关节和执行器的驱动力。驱动器通常包括伺服驱动器、步进驱动器和直流驱动器等。伺服驱动器具有高精度、高响应速度和高稳定性的特点,适用于高精度和高速度的机器人应用;步进驱动器具有结构简单、成本低和控制方便的特点,适用于低速和低精度的机器人应用;直流驱动器则具有大扭矩、高效率和高可靠性的特点,适用于重型和大型机器人应用。
传感器是控制柜的感知部分,它负责检测机器人的运动状态、位置、速度、力矩等信息,并将这些信息反馈给控制器。传感器通常包括编码器、力矩传感器、触觉传感器、视觉传感器等。编码器用于检测机器人关节的角度和速度,力矩传感器用于检测机器人关节的力矩,触觉传感器用于检测机器人与物体的接触状态,视觉传感器则用于获取机器人工作环境的视觉信息。
- 通信模块
通信模块是控制柜的信息传输部分,它负责将控制柜内部的信息传输到外部设备,或将外部设备的信息传输到控制柜内部。通信模块通常包括以太网模块、串行通信模块、无线通信模块等。以太网模块用于实现控制柜与工业以太网的连接,串行通信模块用于实现控制柜与串行设备的连接,无线通信模块则用于实现控制柜与无线设备的连接。
- 人机界面
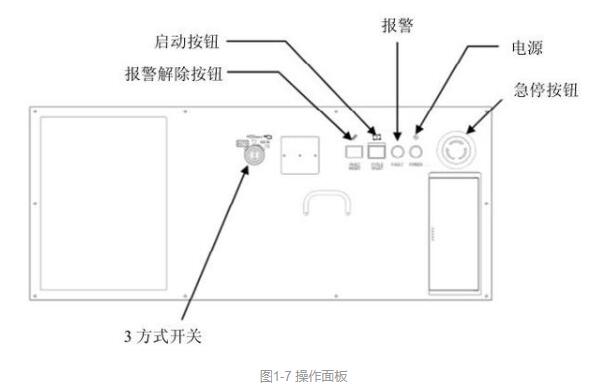
人机界面是控制柜的操作部分,它负责将操作者的指令输入到控制柜,并将控制柜的状态信息显示给操作者。人机界面通常包括触摸屏、键盘、鼠标、指示灯、显示屏等。触摸屏和键盘用于输入操作者的指令,鼠标用于实现精确的操作,指示灯用于显示控制柜的工作状态,显示屏则用于显示控制柜的详细信息。
- 安全模块
安全模块是控制柜的保护部分,它负责在机器人出现异常或危险情况时进行保护和报警。安全模块通常包括紧急停止按钮、安全门开关、安全光幕等。紧急停止按钮用于在机器人出现异常时立即停止其运动,安全门开关用于检测机器人的安全区域是否被侵入,安全光幕则用于检测机器人的工作区域是否有人或物体进入。
二、软件组成
操作系统是控制柜软件的基础,它负责管理控制柜的硬件资源,提供软件运行的环境。常见的操作系统包括实时操作系统(RTOS)、嵌入式操作系统(如Linux、VxWorks等)和通用操作系统(如Windows、macOS等)。
- 机器人编程语言
机器人编程语言是用于编写机器人控制程序的编程语言,它具有易于理解和编写、易于调试和维护的特点。常见的机器人编程语言包括C/C++、Python、Java等。
- 机器人运动学和动力学库
机器人运动学和动力学库是用于计算机器人的运动轨迹和速度的软件库,它包括正运动学、逆运动学、动力学模型等。这些库可以简化机器人控制程序的编写,提高程序的可靠性和稳定性。
- 机器人控制算法
机器人控制算法是用于实现机器人运动控制的算法,它包括PID控制、自适应控制、模糊控制等。这些算法可以根据机器人的实际运动状态和工作环境,自动调整控制参数,实现精确和稳定的控制。
- 机器人通信协议
机器人通信协议是用于实现控制柜与外部设备通信的协议,它包括Modbus、Profibus、EtherCAT等。这些协议可以保证通信的可靠性和实时性,提高机器人系统的兼容性和扩展性。
-
滤波器
+关注
关注
161文章
7946浏览量
179880 -
自动化系统
+关注
关注
3文章
261浏览量
29849 -
工业机器人
+关注
关注
91文章
3406浏览量
93276 -
控制柜
+关注
关注
4文章
167浏览量
15351
发布评论请先 登录
相关推荐
什么是工业机器人
青岛ABB工业机器人无法正常进入系统故障维修
一种工业机器人码垛实操工作站
PDF——工业机器人技术及应用
工业机器人控制柜组成_工业机器人控制柜的作用是什么
工业机器人安装调试的13个步骤


基于KUKA C4机器人的控制柜(CCU)设计

发那科机器人A型控制柜急停板安全回路接线方法





 工商网监
工商网监
评论