 abb机器人编程指令详解中的call什么意思
abb机器人编程指令详解中的call什么意思
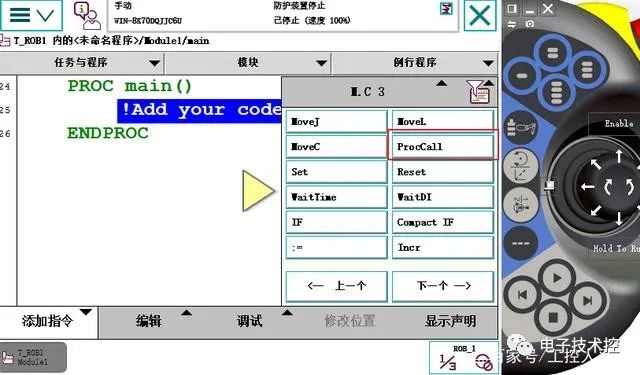
ABB机器人编程指令详解中的“call”是一个非常重要的指令,它允许程序员在程序中调用另一个程序或子程序。
- 概述
在ABB机器人编程中,程序是由一系列的指令组成的,这些指令可以控制机器人的运动、操作和逻辑。然而,随着程序的复杂性增加,将所有指令都放在一个程序中可能会导致代码难以维护和理解。为了解决这个问题,ABB提供了“call”指令,允许程序员将一部分代码封装成一个子程序,然后在主程序中调用这个子程序。
- 语法
“call”指令的基本语法如下:
call [with ]
其中:
- `` 是要调用的子程序的名称。
[with ]是可选的参数列表,用于传递数据给子程序。
- 功能
“call”指令的主要功能是调用子程序。子程序可以是一个独立的程序,也可以是一个程序块。使用“call”指令,程序员可以将重复使用的代码或复杂的逻辑封装在子程序中,然后在主程序中通过“call”指令调用这个子程序。这有助于提高代码的可读性、可维护性和可重用性。
- 使用场景
以下是一些常见的使用“call”指令的场景:
- 重复使用的代码:如果一段代码在程序中多次出现,可以将这段代码封装成一个子程序,然后在需要的地方使用“call”指令调用。
- 复杂的逻辑:如果程序中的某个逻辑比较复杂,可以将这个逻辑封装成一个子程序,以简化主程序的代码。
- 参数化操作:如果一个操作需要根据不同的参数执行不同的逻辑,可以将这个操作封装成一个子程序,并在调用时传递相应的参数。
- 示例
以下是一个使用“call”指令的示例:
假设我们有一个机器人需要在不同的位置上执行相同的操作,我们可以将这个操作封装成一个子程序,然后在主程序中调用这个子程序。
子程序(命名为“do_operation”):
do_operation:
MoveJ p1, v100, z100
WaitTime 1
MoveJ p2, v100, z100
WaitTime 1
EndSub
主程序:
MainProgram:
MoveJ home, v100, z100
call do_operation with p1:=[100, 0, 0, 0, 0, 90], p2:=[200, 0, 0, 0, 0, 90]
MoveJ home, v100, z100
call do_operation with p1:=[-100, 0, 0, 0, 0, 90], p2:=[-200, 0, 0, 0, 0, 90]
EndProgram
在这个示例中,我们定义了一个名为“do_operation”的子程序,它接受两个参数p1和p2。在主程序中,我们使用“call”指令调用了两次“do_operation”子程序,每次传递不同的参数。
- 注意事项
在使用“call”指令时,需要注意以下几点:
- 子程序的名称应该是唯一的,以避免与其他程序或子程序混淆。
- 在调用子程序时,确保传递的参数与子程序定义的参数类型和数量一致。
- 如果子程序需要返回值,可以使用“return”指令将值返回给主程序。
- 在编写子程序时,要确保子程序的逻辑是独立的,不依赖于主程序的上下文。
- 结论
“call”指令是ABB机器人编程中一个非常有用的工具,它允许程序员将代码封装成子程序,然后在主程序中调用这些子程序。这有助于提高代码的可读性、可维护性和可重用性。通过合理使用“call”指令,程序员可以编写更加简洁、高效的机器人程序。
-
指令
+关注
关注
1文章
611浏览量
35804 -
编程
+关注
关注
88文章
3637浏览量
93931 -
代码
+关注
关注
30文章
4823浏览量
68959 -
ABB机器人
+关注
关注
15文章
89浏览量
13566
发布评论请先 登录
相关推荐
ABB IRB5400-喷涂工业机器人
ABB机器人指令模块介绍与开发过程
ABB机器人维修保养指南
对《工业机器人编程指令详解》的详细介绍

工业机器人ABB编程常用指令





 工商网监
工商网监
评论