 伺服电机矢量控制原理详解
伺服电机矢量控制原理详解
一、引言
伺服电机矢量控制作为现代电机控制技术的重要分支,广泛应用于工业自动化、精密加工、机器人技术等领域。其核心思想是通过模拟直流电机的控制原理,实现对交流电机的高效、精确控制。本文将详细阐述伺服电机矢量控制的原理,包括其理论基础、控制策略、实现方法以及应用领域等方面。
二、伺服电机矢量控制的理论基础
伺服电机矢量控制是基于电机学、电力电子学和自动控制原理等多学科交叉融合的一种控制方法。其理论基础主要包括电机的数学模型、坐标变换和磁场定向控制等。
电机的数学模型
伺服电机矢量控制首先需要对电机的数学模型进行深入研究。电机的数学模型描述了电机内部的电磁关系、转矩产生机理以及运动特性等。在矢量控制中,通常将电机的数学模型简化为一个线性时不变系统,以便于进行数学分析和控制设计。
坐标变换
坐标变换是伺服电机矢量控制的关键技术之一。在三相坐标系下,电机的电压、电流和磁链等物理量都是时变的,难以直接进行控制。因此,需要通过坐标变换将三相坐标系下的物理量转换到两相静止坐标系或两相旋转坐标系下,以便于进行解耦控制和精确控制。
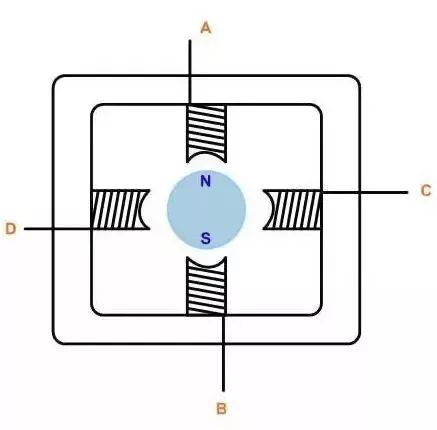
磁场定向控制
磁场定向控制是伺服电机矢量控制的另一个重要技术。在磁场定向控制中,通过控制电机定子绕组的电流,使电机的磁场方向与转子的磁场方向保持一致,从而提高电机的转矩和控制精度。磁场定向控制可以实现电机的快速响应和高精度控制。
三、伺服电机矢量控制策略
伺服电机矢量控制策略主要包括速度闭环控制、位置闭环控制和电流环控制等。
速度闭环控制
速度闭环控制是伺服电机矢量控制的基本控制策略之一。通过测量电机转子的瞬时速度,并将其与给定速度进行比较,得到速度误差信号。然后,根据速度误差信号,通过控制算法计算出电机的控制信号,通过电机驱动器将控制信号转化为实际的电机转矩。通过实时调整电机的转矩,使其与给定的速度尽可能接近。
位置闭环控制
位置闭环控制是在速度闭环控制的基础上,进一步实现对电机位置的精确控制。在位置闭环控制中,首先需要将电机的转矩转化为角度信息,即通过测量电机转子的位置,得到与之对应的位置信号。然后,将位置信号与给定位置进行比较,得到位置误差信号。通过控制算法计算出电机的控制信号,控制电机的转矩,使其按照给定位置进行运动。通过不断调整电机的转矩,使位置误差尽可能减小,实现对电机位置的精确控制。
电流环控制
电流环控制是伺服电机矢量控制中的另一个重要环节。在电流环控制中,通过对电机定子电流的实时监测和控制,确保电机在运行过程中电流的稳定性和准确性。电流环控制可以实现对电机转矩的精确控制,进一步提高电机的控制精度和响应速度。
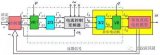
四、伺服电机矢量控制的实现方法
伺服电机矢量控制的实现方法主要包括基于数字信号处理器的控制方法和基于微控制器的控制方法。
基于数字信号处理器的控制方法
基于数字信号处理器的控制方法通常采用高性能的数字信号处理器(DSP)作为控制核心,通过编写特定的控制算法程序,实现对电机的精确控制。这种方法具有控制精度高、响应速度快、功能强大等优点,但成本相对较高。
基于微控制器的控制方法
基于微控制器的控制方法通常采用微控制器(MCU)作为控制核心,通过编写嵌入式控制程序实现对电机的控制。这种方法具有成本低、易于实现等优点,但控制精度和响应速度可能受到微控制器性能的限制。
五、总结归纳
伺服电机矢量控制作为一种高效、精确的电机控制方法,在现代工业自动化和精密加工等领域得到了广泛应用。其理论基础包括电机的数学模型、坐标变换和磁场定向控制等;控制策略主要包括速度闭环控制、位置闭环控制和电流环控制等;实现方法包括基于数字信号处理器的控制方法和基于微控制器的控制方法等。通过深入研究伺服电机矢量控制的原理和实现方法,可以进一步提高电机的控制精度和响应速度,为工业自动化和精密加工等领域的发展提供有力支持。
-
控制技术
+关注
关注
3文章
346浏览量
33158 -
伺服电机
+关注
关注
85文章
2048浏览量
57937 -
矢量控制
+关注
关注
2文章
284浏览量
32236
发布评论请先 登录
相关推荐
矢量控制和伺服控制相关资料分享
电机矢量控制学习

BLDC电机的矢量控制介绍





 工商网监
工商网监
评论