 什么是步进电机控制器?步进电机控制器电路图
什么是步进电机控制器?步进电机控制器电路图
步进电机控制器是一种专门用于控制步进电机运行的装置。步进电机是一种将电脉冲信号转变为角位移或线位移的开环控制元件,其运行需要由步进电机控制器产生的脉冲信号来进行驱动。这些脉冲信号不仅决定了步进电机的转动方向,还决定了其转动的速度和位置。
步进电机控制器通常具备以下功能:
脉冲生成:步进电机控制器能够生成一系列的电脉冲信号,这些信号被用来驱动步进电机进行旋转。脉冲的频率决定了电机的转速,而脉冲的数量则决定了电机转动的角度。
方向控制:通过改变脉冲信号的顺序或极性,步进电机控制器可以控制电机的旋转方向。
细分控制:为了提高步进电机的精度和减小步距角,步进电机控制器通常支持细分控制。这意味着每个脉冲可以使电机转动更小的角度,从而实现更精细的位置控制。
加减速控制:为了避免步进电机在启动和停止时产生过大的冲击和振动,步进电机控制器通常具备加减速控制功能。它可以根据需要调整脉冲信号的频率,使电机在启动和停止时能够平稳地过渡。
保护功能:步进电机控制器还具备一些保护功能,如过流保护、过热保护等,以确保电机在异常情况下能够安全地停止运行。
步进电机控制器广泛应用于各种需要精确控制位置和速度的领域,如自动化设备、机器人、数控机床、医疗设备、包装机械等。随着技术的不断发展,步进电机控制器的性能也在不断提高,功能越来越丰富,控制精度也越来越高。
二、步进电机控制器电路图
1、 简单的步进电机控制器电路图
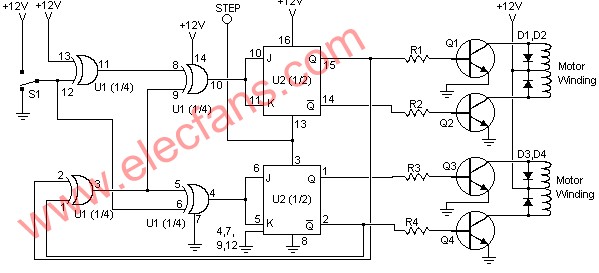
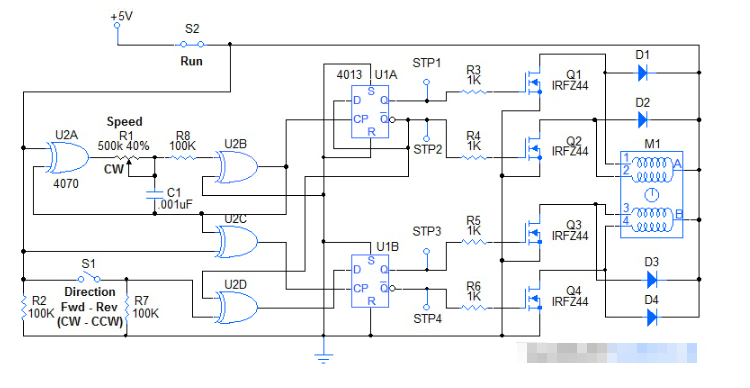
这是仅使用基本部件的简单步进电机控制器的电路图。驱动电路使用四个晶体管(SL100)驱动电机绕组,两个非门和一个异或门解码两位控制逻辑来驱动电机的四个绕组。二极管D1至D4保护相应的晶体管免受电机绕组切换期间产生的瞬变的影响。 d0 和 d1 是确定旋转方向和速度的控制逻辑。

该电路的控制逻辑可以从由555非稳态多谐振荡器提供时钟的2位向上/向下计数器获得。计数方向决定旋转方向,非稳态多谐振荡器的频率决定旋转速度。
如上图所示,IC1a IC1b 属于同一个 IC 7404。 IC1和IC2的引脚14和引脚7必须分别连接至+5V和地,尽管电路图中未示出。5V可以从基于7805的电源电路获得。
Vcc是步进电机所需的电压。它因电机而异。这里我们可以使用最高24V的步进电机。为了获得更高的工作电压和功率,必须将 SL100 晶体管替换为更高功率的晶体管,例如 2N3055。
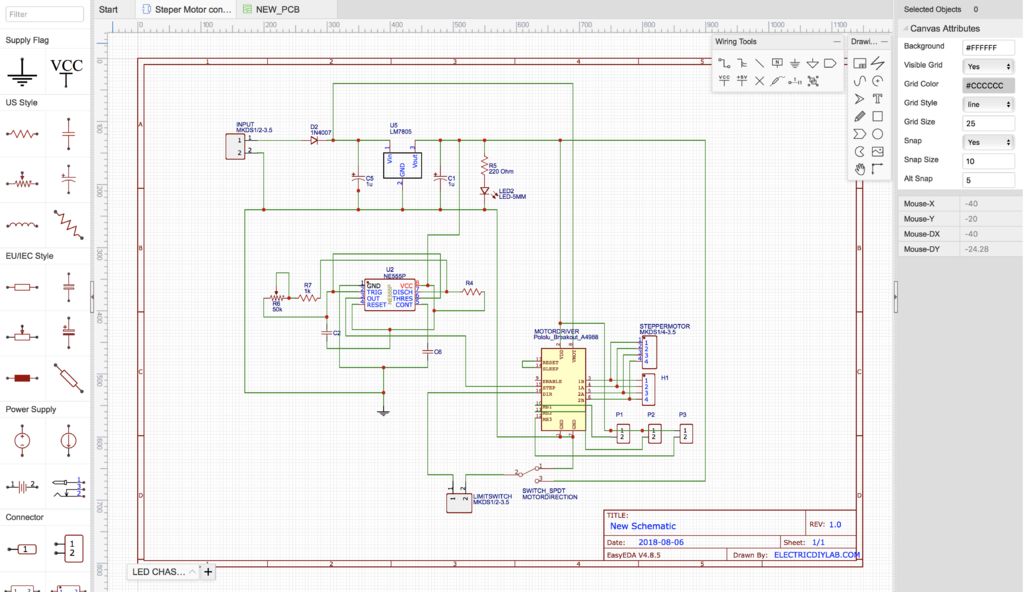
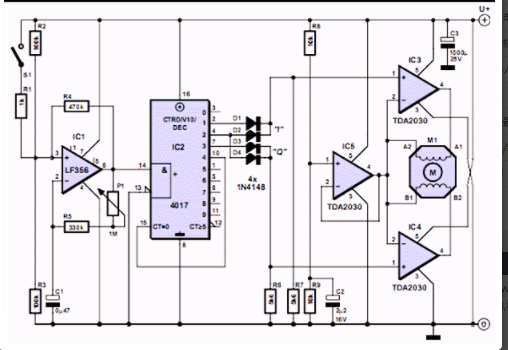
2、基于555定时器的步进电机控制器电路图
简单的555定时器步进电机控制器电路采用少量易于使用的组件进行设计。该电路使步进电机连续驱动,没有任何中断或步进停止。通过使用该电路,我们可以驱动具有不同额定电压的单极步进电机。请记住,该电路仅使用 9V 电源,并且能够驱动 12V 以下的步进电机。如果要驱动高于 12V 的步进电机,请为步进电机和功率开关晶体管添加外部电源。
该电路有两部分,一部分用于产生方波脉冲振荡,另一部分用于向步进电机提供步进脉冲。
步进电机
我们知道步进电机也称为步进电机,大多数是无刷直流电机,将其整个旋转分成多个相等的步数,该电机可用于不同的应用,如3D打印机、数控机床、自动门等..,
这种步进电机根据定子绕组基本上分为两类,
双极步进电机
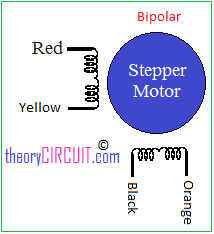
双极步进电机每相只有一个绕组,只有4根引线连接两组内部电磁铁线圈,可以通过改变通过电机线圈的电流方向来实现正向和反向步进,这可能比单极更复杂,但H-电桥和步进电机驱动电路使其变得非常简单。
单极步进电机
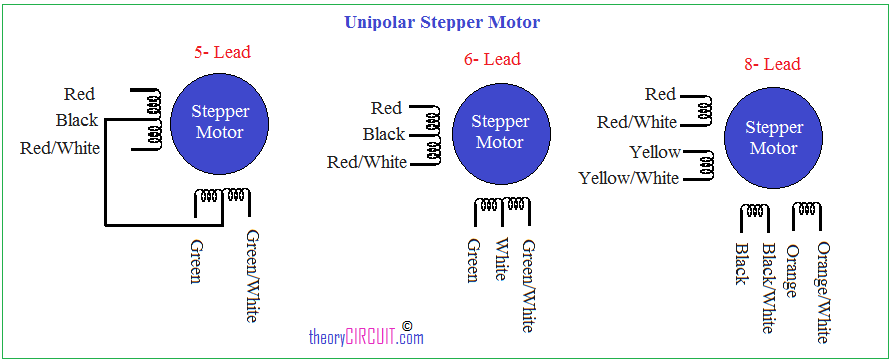
单极配有 5、6 和 8 根引线,并通过每相输入的中心抽头运行一个绕组。此图显示了不同类型的单极步进电机及其引线配置,请参阅步进电机的数据表以了解更多信息。
电路原理图
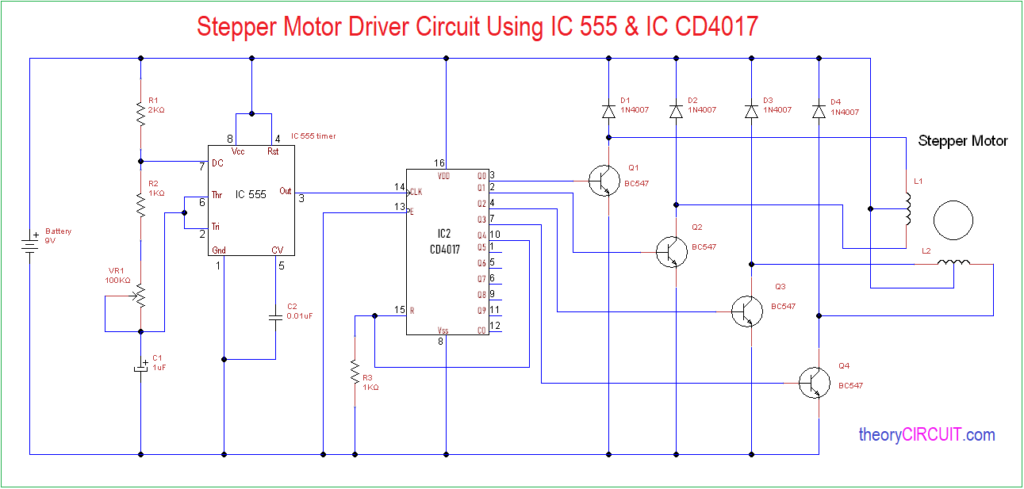
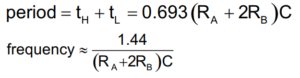
这里,定时器IC 555用作非稳态多谐振荡器,并基于定时电阻器和定时电容器振荡方波脉冲。
第二级是十进制计数器IC CD4017级,该集成电路对来自定时器IC的方波脉冲进行计数,并通过Q0、Q1、Q2和Q3输出引脚提供步进脉冲输出,每个脉冲通过开关晶体管BC547馈送到步进电机线圈。
-
电路图
+关注
关注
10356文章
10725浏览量
532511 -
步进电机
+关注
关注
151文章
3120浏览量
147788 -
步进电机控制器
+关注
关注
1文章
19浏览量
6436
发布评论请先 登录
相关推荐
如何使用FPGA实现步进电机控制器








 工商网监
工商网监
评论