 逐际动力携手英伟达Isaac平台, 助力通用机器人研发
逐际动力携手英伟达Isaac平台, 助力通用机器人研发
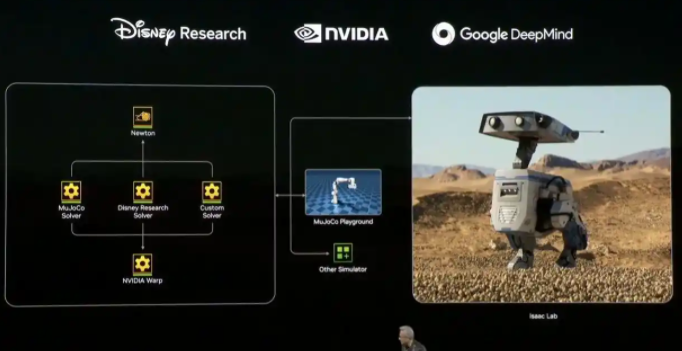
在近日举行的年度计算机视觉与模式识别会议(CVPR)上,英伟达发布了其最新版本的NVIDIA Isaac Sim。与此同时,逐际动力也宣布将采用这一升级版的Isaac平台,以强化学习和提升通用机器人的泛化能力为核心目标,推动机器人技术的进一步发展。
英伟达Isaac平台作为业界领先的机器人仿真和AI开发平台,一直以其强大的性能和创新的技术架构,受到业界的广泛关注。此次发布的NVIDIA Isaac Sim新版本,更是在仿真真实度和AI训练效率上取得了显著的提升。
逐际动力作为机器人技术的领军企业,始终致力于推动机器人技术的创新和应用。通过与英伟达的合作,逐际动力将能够充分利用Isaac平台的优势,进一步提升其通用机器人的泛化能力。通过强化学习技术,逐际动力将能够使机器人更好地适应各种复杂环境,提高机器人的智能水平和实用性。
此次合作不仅是逐际动力在机器人技术领域的又一重要布局,也是英伟达Isaac平台在机器人行业应用的又一成功案例。未来,双方将继续深化合作,共同推动机器人技术的创新和发展,为人类社会的智能化进程贡献更多的力量。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
212文章
29015浏览量
210019 -
计算机
+关注
关注
19文章
7582浏览量
89304 -
英伟达
+关注
关注
22文章
3891浏览量
92576
发布评论请先 登录
相关推荐
机器人Blue亮相 搭载英伟达最新GR00T N1人形机器人通用基础模型
2025年3月19日机器人Blue亮相,英伟达在GTC 2025大会上正式发布机器人Blue,CEO黄仁勋现场展示机器人Blue.黄仁勋称
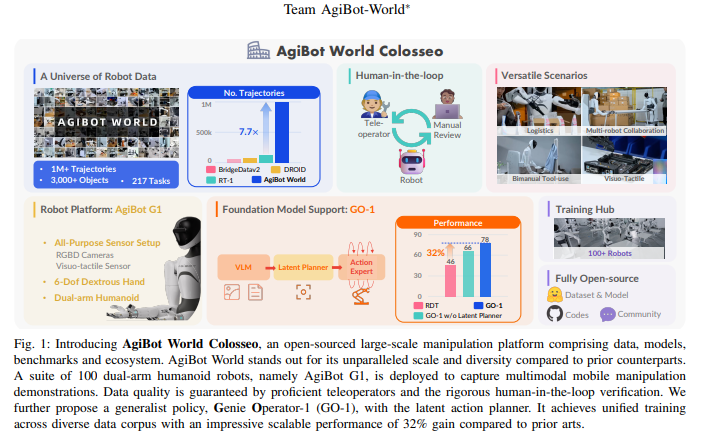
AgiBot World Colosseo:构建通用机器人智能的规模化数据平台
AgiBot World Colosseo:构建通用机器人智能的规模化数据平台 随着人工智能在语言处理和计算机视觉领域取得突破,机器人技术仍面临现实场景泛化能力的挑战。这一困境的核心在于高质量
广东新支柱产业“拼图”:深圳这四家人形机器人企业受关注
电子发烧友网综合报道 近日,广东省省长王伟中调研了深圳多家人形机器人企业,包括逐际动力、乐聚、帕西尼感知和众擎机器人,另外他还考察了腾讯的R
发表于 02-14 00:03
•721次阅读
优锘科技携手逐际动力,共创数字孪生与具身智能机器人新未来
近日,优锘科技与逐际动力正式宣布达成战略合作,双方将在业务和技术领域展开深度协作,共同探索数字孪生与具身智能机器人的融合应用。这一合作无疑将为智能科技领域注入全新
星海图发布R1系列仿人形通用机器人新品
近日,星海图公司正式发布了其全新的R1系列仿人形通用机器人产品,该系列包括R1 Pro、R1和R1 Lite三款不同配置的型号,定价从19.9万元起。 星海图R1系列机器人均标配了英伟达
地瓜机器人发布一系列通用机器人套件
在“机器人+”浪潮的推动下,地瓜机器人近日隆重推出了一系列面向未来的软硬件产品组合,旨在赋能新一代通用机器人的发展。此次发布的亮点包括旭日5智能计算芯片、RDK X5机器人开发者套件以
逐际动力发布全尺寸人形机器人CL-2
2024世界机器人大会盛大启幕于北京·北人亦创国际会展中心,国内领先通用机器人制造商逐际动力LimX Dynamics在此盛会中震撼发布了其
阿尔特携手英伟达,将Omniverse融入机器人研发
近日,阿尔特公司在其机构调研活动中透露,公司正携手英伟达技术团队,将Omniverse平台深度融入机器人
逐际动力再获资本青睐,加速通用人形机器人技术商业化进程
通用机器人领域的创新先锋——逐际动力LimX Dynamics宣布,继今年5月成功完成由阿里巴巴旗下杭州灏月领投的战略融资后,近期再次吸引了多家知名投资机构的青睐,其中招商局创投与上汽
通用人形机器人公司逐际动力完成A轮战略融资
在科技日新月异的今天,通用机器人领域正迎来前所未有的发展机遇。作为该领域的佼佼者,逐际动力LimX Dynamics在短短数月内连续取得融资佳绩,再次证明了其在
软通动力与智元新创在通用机器人领域将展开合作
在上海携手签署了一项具有里程碑意义的战略合作协议,标志着双方在通用机器人产品创新、场景示范等关键领域将展开深度合作,共同探索人形机器人技术的新边界,致力于将这一前沿科技成果推向千行万业,赋能社会各领域的智能化升级。
NVIDIA Isaac 机器人平台利用最新的生成式 AI 和先进的仿真技术,加速 AI 机器人技术的发展
观众展示了用于人形机器人学习的通用基础模型 Project GR00T(代表通用机器人 00 技术)。Project GR00T 利用 NVIDIA Isaac

NVIDIA Isaac机器人平台升级,加速AI机器人技术革新
NVIDIA Isaac机器人平台近期实现重大升级,通过引入最新的生成式AI技术和先进的仿真技术,显著加速了AI机器人技术的发展步伐。该平台正不断扩展其基础模型、





 工商网监
工商网监
评论