 利用全卷积神经网络生成多深度三维全息
利用全卷积神经网络生成多深度三维全息
空间光调制器是一种在主动控制下利用自身属性对输入光的振幅、相位等参量做调制输出的光学器件,通过对光波波前、光波波束进行量化及指向性的控制,在最终接受面获得预期的光场分布。将空间光调制器应用在光学神经网络已经过几十年的发展,并且随着空间光调制器调制精度的提升以及计算算法的不断优化,光学神经网络的巨大潜力也不断地被挖掘,在机器视觉、医学影像处理、光学传感器网络等领域都有着潜在的应用前景。
论文信息
本文介绍了一种利用全卷积神经网络(FCN)生成多深度相位全息的方法。该方法主要涉及一个前向-后向衍射框架来计算多深度衍射场,以及一个逐层替换方法(L2RM)来处理遮挡关系。由前者计算的衍射场被输入到精心设计的FCN中,它利用其强大的非线性拟合能力来生成3D场景的多深度全息图。后者可以通过补充被遮挡物体的信息,使场景重建中不同层的边界进行平滑处理,从而提高全息图的重建质量。实验中通过将计算全息图(computer-generated hologram,CGH)加载到核心组件空间光调制器(spatial light modulator,SLM)上,实现刷新和动态3D显示。
部分实验过程及实验结果
实验中使用波长为638(±8)nm、功率为30mW的非偏振半导体激光器,如图1所示,光纤的输出端放置在焦距为100mm的准直透镜焦点处来获得平面波,使用中性密度滤波器作为衰减器和偏振器来获得线偏光。旋转半波片(HWP)使得光的偏振方向与LCOS配向角方向一致,接着插入一个矩形孔径,得到矩形轮廓。利用空间光调制器(中科微星 FSLM-4K70-P02)对入射光进行相位调制和反射,再使用焦距为100mm的傅里叶透镜进一步放大重建场景。采用空间滤波器,使所需的衍射阶通过,其他衍射阶滤波。重建后的放大3D场景使用相机拍摄。
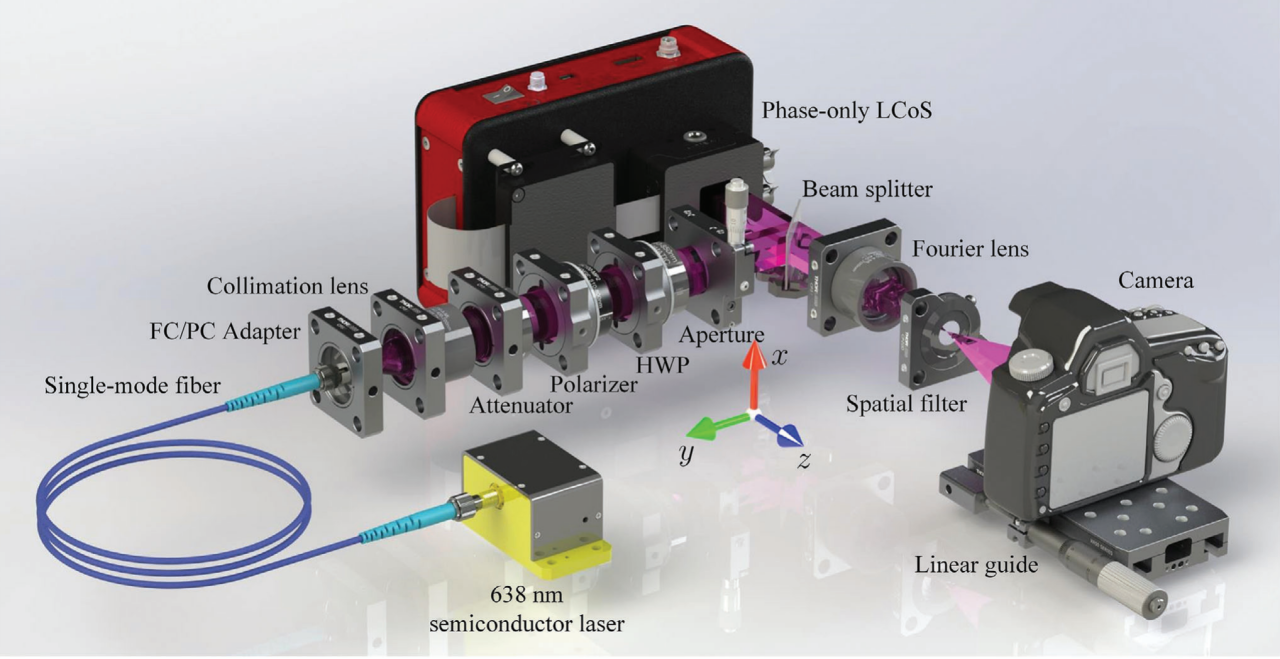 图1 实验装置(相位型空间光调制器,型号:FSLM-4K70-P02)
图1 实验装置(相位型空间光调制器,型号:FSLM-4K70-P02)

|
型号 |
FSLM-4K70-P02 |
调制类型 |
相位型 |
|
液晶类型 |
反射式 | 灰度等级 |
8位,256阶 |
|
像素数 |
4094×2400 |
像元大小 | 3.74μm |
|
有效区域 |
0.7" 15.31mm×8.98mm |
相位范围 |
2π@633nm |
| 填充因子 | 90% | 光学利用率 | 60%@532nm |
| 配向角 |
0° |
衍射效率 | >97%@32阶 633nm |
|
刷新频率 |
60Hz | 光学利用率 |
35%@532nm |
|
电源输入 |
12V 2A |
响应时间 |
上升10.8ms,下降18.5ms |
|
损伤阈值 |
2W/cm² |
数据接口 |
HDMI |
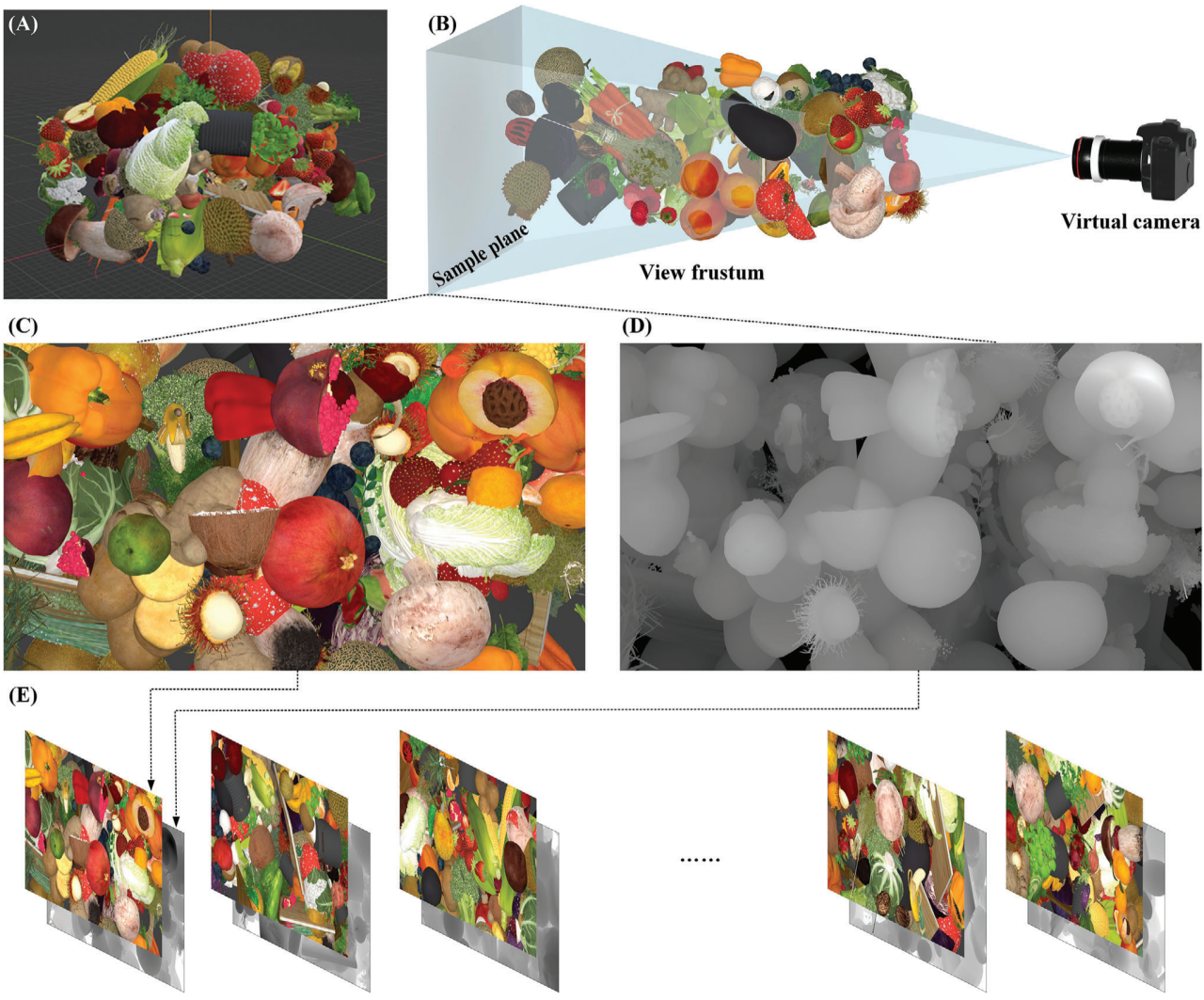 图2三维图形数据集的生成。A)3D随机场景。B)取样过程。C)强度图像。D)深度图像。E)三维图形数据集。
图2三维图形数据集的生成。A)3D随机场景。B)取样过程。C)强度图像。D)深度图像。E)三维图形数据集。
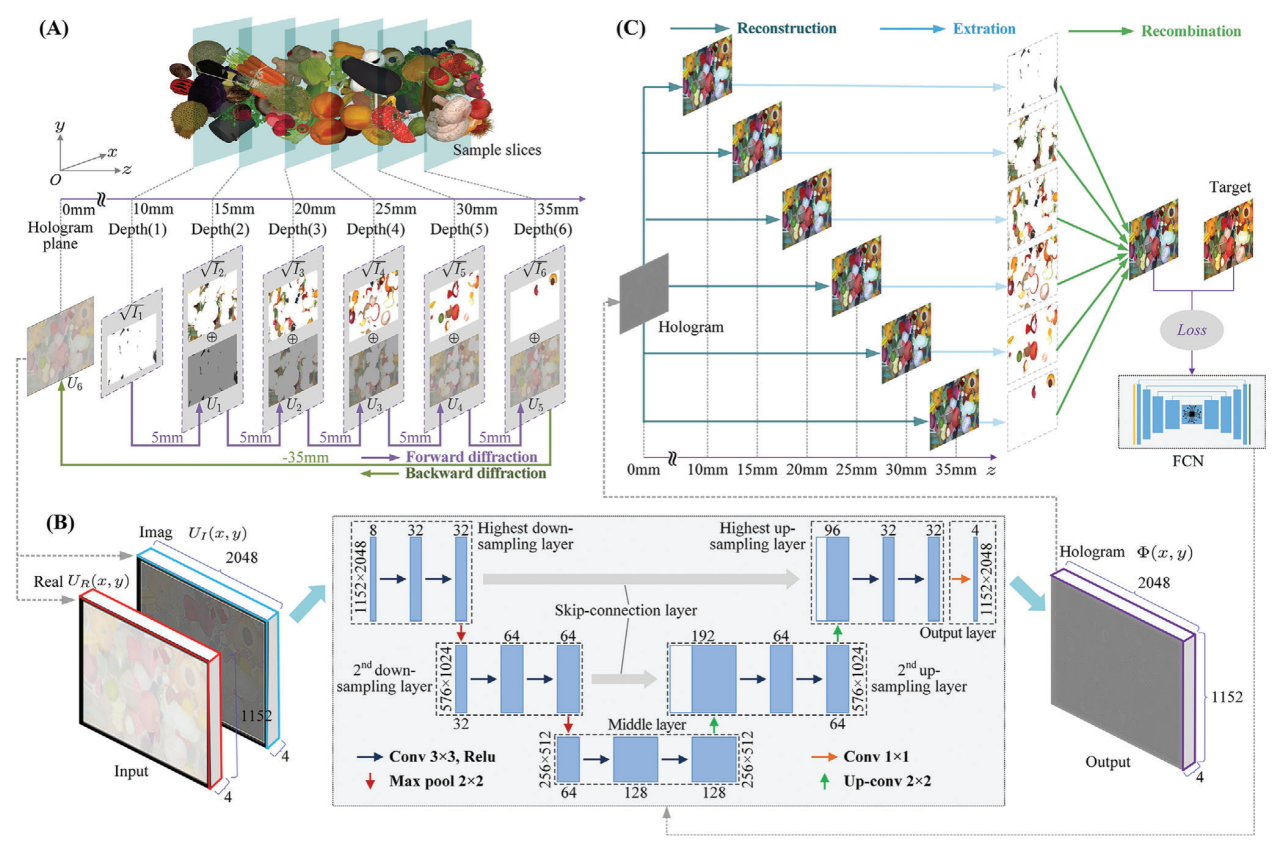 图3 用FCN生成多深度全息图。A)利用前后衍射框架计算多深度衍射场。B)FCN的结构。C)多深度误差的计算。
图3 用FCN生成多深度全息图。A)利用前后衍射框架计算多深度衍射场。B)FCN的结构。C)多深度误差的计算。
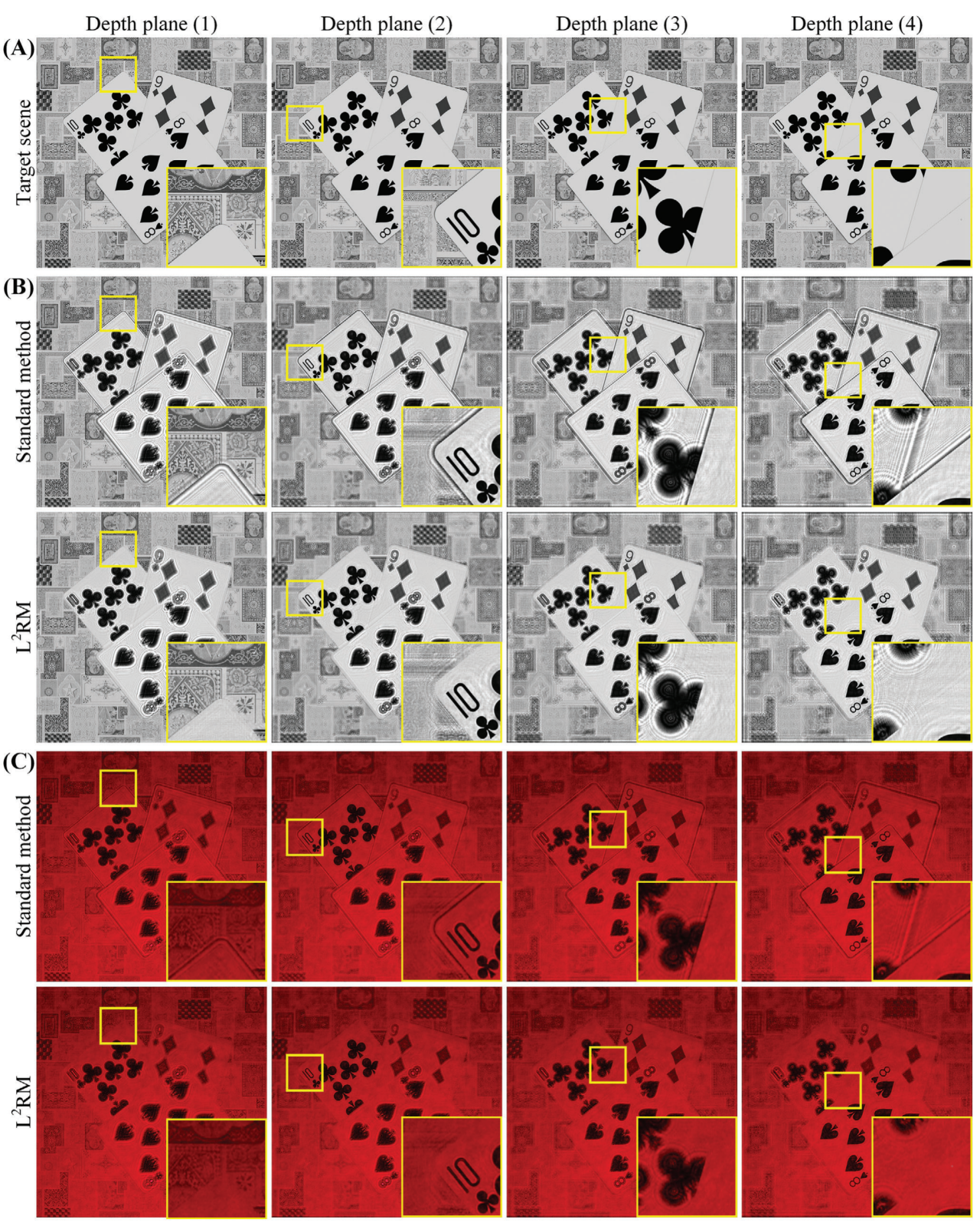 图4 重建图像的质量比较。A)目标场景。B) 分别对应标准方法和L2RM的数值重建。C) 分别对应标准方法和L2RM的光学重建。
图4 重建图像的质量比较。A)目标场景。B) 分别对应标准方法和L2RM的数值重建。C) 分别对应标准方法和L2RM的光学重建。
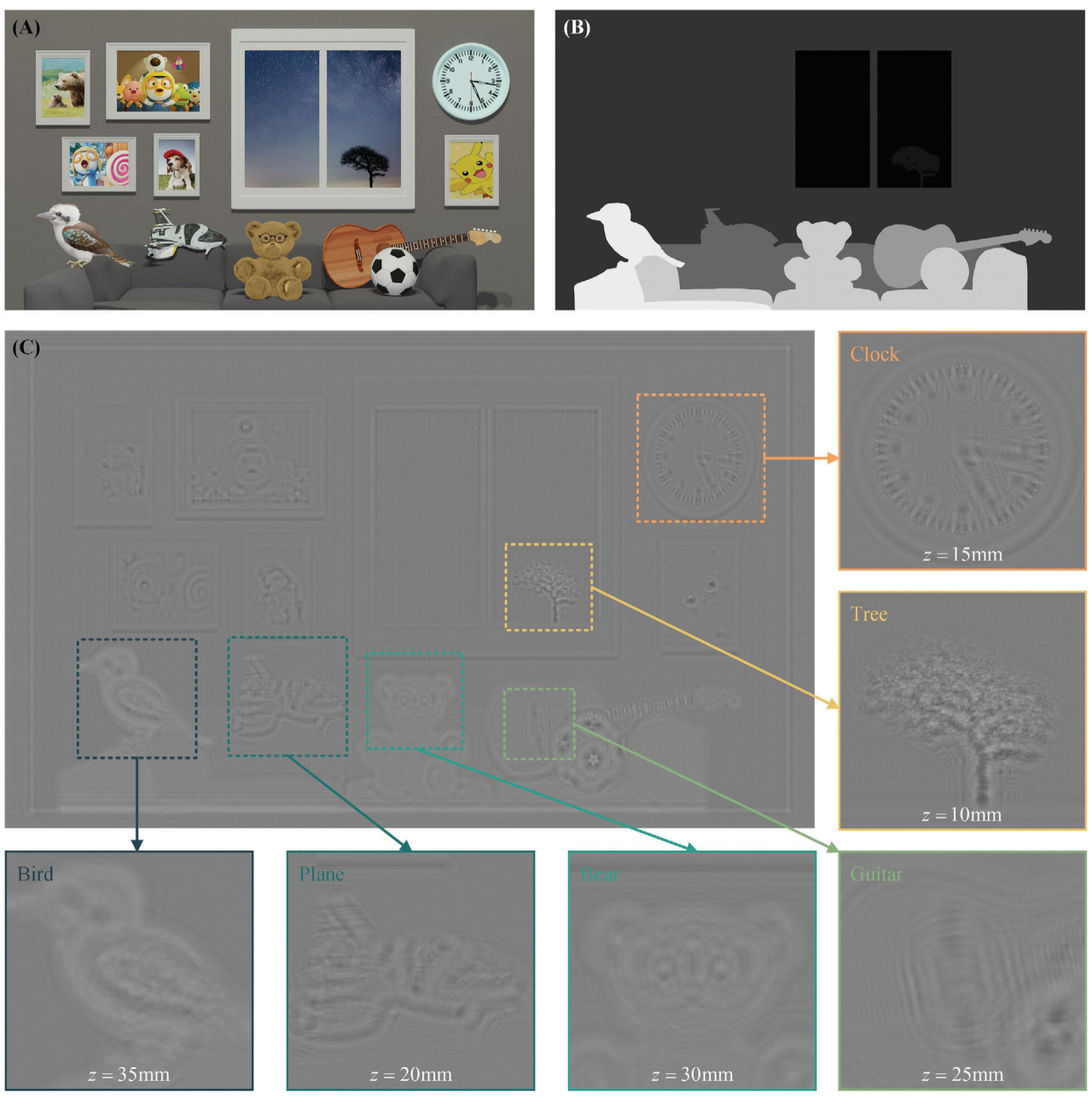 图5 复杂的三维场景和相应的全息图。A)强度图像和B)三维场景的深度图像。C)由FCN生成的多深度全息图。
图5 复杂的三维场景和相应的全息图。A)强度图像和B)三维场景的深度图像。C)由FCN生成的多深度全息图。
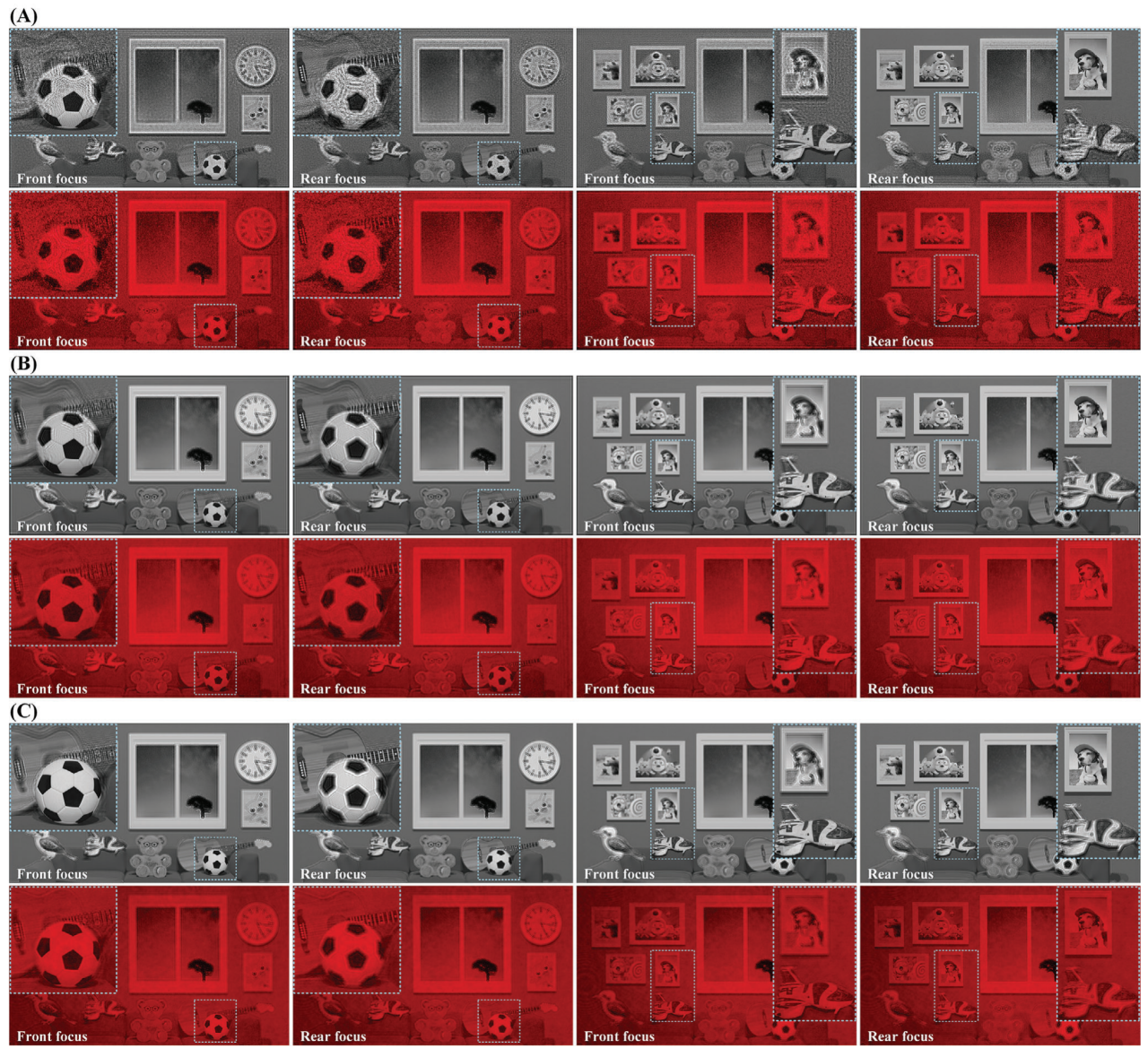 图6 A) WH、B) DPH和C) L2RM的数值重建和光学重建。第1、3、5行的图像表示数值重建,而第2、4、6行表示光学重建。在第1列和第2列中,相机分别聚焦于“足球-吉他”的前聚焦平面(“足球”)和后聚焦平面(“吉他”)。在第3列和第4列中,相机分别聚焦于“飞机-狗”的前对焦平面(“飞机”)和后对焦平面(“狗”)。
图6 A) WH、B) DPH和C) L2RM的数值重建和光学重建。第1、3、5行的图像表示数值重建,而第2、4、6行表示光学重建。在第1列和第2列中,相机分别聚焦于“足球-吉他”的前聚焦平面(“足球”)和后聚焦平面(“吉他”)。在第3列和第4列中,相机分别聚焦于“飞机-狗”的前对焦平面(“飞机”)和后对焦平面(“狗”)。
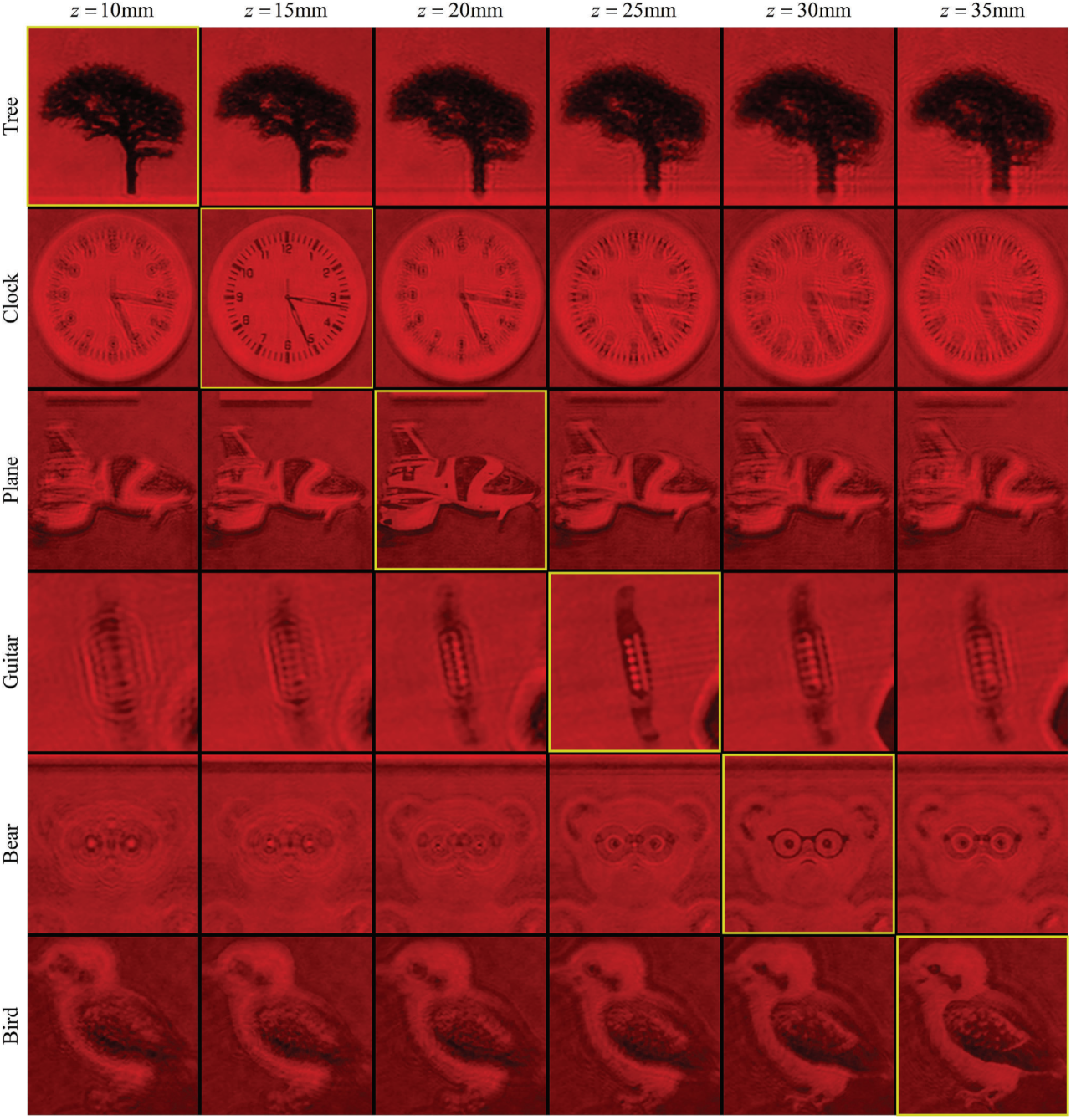 图7 在不同深度的平面上重建对象。
图7 在不同深度的平面上重建对象。
写在最后
光神经网络因具有并行大规模计算、低功耗运行以及快速响应的潜力而受人们的广泛关注,而空间光调制器作为衍射器件在衍射神经网络中扮演着重要角色,并且应用在众多领域中,例如AR/VR的3D全息成像计算、生物医学成像、光学传感等。基于衍射神经网络的可编程能力,未来有望实现更高性能的衍射神经网络。
审核编辑 黄宇
-
神经网络
+关注
关注
42文章
4789浏览量
101530 -
三维全息
+关注
关注
0文章
3浏览量
5944 -
光调制器
+关注
关注
0文章
87浏览量
8460
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论