 H桥电机驱动电路电路图 H桥电机驱动电路的工作原理和控制方式
H桥电机驱动电路电路图 H桥电机驱动电路的工作原理和控制方式
H桥电机驱动电路是一种广泛应用于电机控制领域的电子电路,其名称来源于其形状类似于英文字母“H”的电路布局。H桥电路主要用于控制直流电机(包括有刷直流电机、步进电机和伺服电机等)的正反转、调速以及制动等操作。下面将对H桥电机驱动电路进行详细的介绍,内容分为多个部分进行阐述。
一、H桥电机驱动电路的基本结构与组成
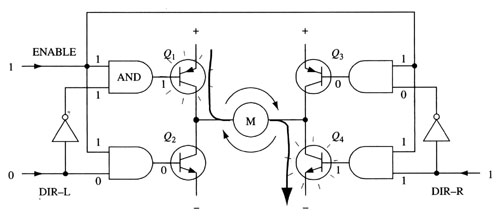
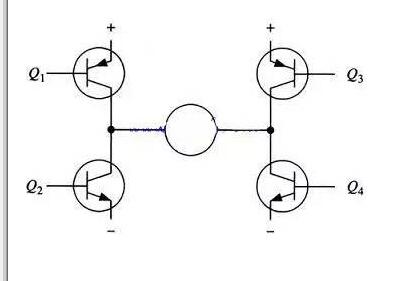
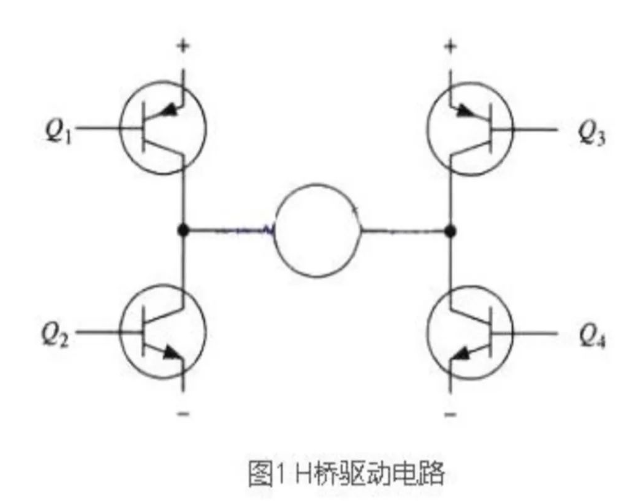
H桥电机驱动电路得名于其电路形状酷似英文字母“H”。该电路主要由四个开关器件(如MOS管、晶体管或继电器等)构成,这四个开关器件被分为两组,每组两个,分别连接在电机的两端。在电路中,电机作为负载位于两个并联支路之间,构成了形如“H”的电路结构。
具体来说,这四个开关器件在H桥电路中通常被标记为Q1、Q2、Q3和Q4。其中,Q1和Q4位于H桥的一侧,而Q2和Q3位于另一侧。这四个开关器件的通断状态直接决定了电机的转动方向、速度和制动。
二、H桥电机驱动电路的工作原理
H桥电机驱动电路的工作原理基于改变电机两端电流的方向来实现电机的正反转、调速和制动。以下是具体的工作原理分析:
正向转动:
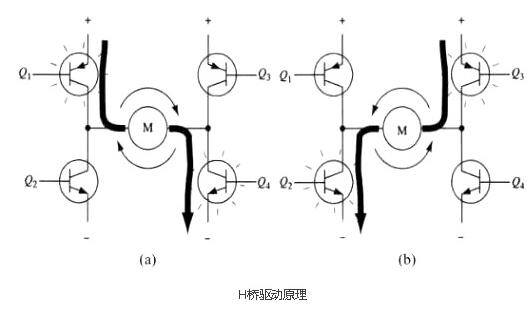
当需要电机正向转动时,控制Q1和Q4导通(即闭合),同时Q2和Q3断开(即打开)。
此时,电流从电源正极经过Q1流向电机的一端,再从电机的另一端经过Q4回到电源负极,形成正向电流。
在这个过程中,电机内部的磁场与电流方向相同,根据安培定则,电机将按照预定的方向旋转。
反向转动:
当需要电机反向转动时,控制Q2和Q3导通,同时Q1和Q4断开。
此时,电流从电源正极经过Q2流向电机的另一端,再从电机的一端经过Q3回到电源负极,形成反向电流。
在这个过程中,电机内部的磁场与电流方向相反,根据安培定则,电机将反向旋转。
调速:
H桥电机驱动电路可以通过调整开关器件的通断时间(即占空比)来实现电机的调速。
当使用PWM(脉宽调制)信号控制开关器件时,可以通过改变PWM信号的占空比来改变电机两端的平均电压,进而改变电机的转速。
占空比越大,电机两端的平均电压越高,电机转速越快;占空比越小,电机两端的平均电压越低,电机转速越慢。
制动:
当需要电机快速停止时,可以同时关闭所有开关器件(即Q1、Q2、Q3和Q4都断开)。
此时,电机两端的电流被切断,电机内部的磁场迅速消失,电机将迅速停止转动。
另外,也可以通过使对角线上的两个开关器件(如Q1和Q3或Q2和Q4)同时导通,将电机两端短路,形成电机制动状态,使电机迅速停止转动。
三、H桥电机驱动电路的特点与应用
H桥电机驱动电路具有以下特点:
控制灵活:通过控制四个开关器件的通断状态,可以实现对电机的正反转、调速和制动等多种控制。
效率高:由于H桥电路直接控制电机的电流方向,因此具有较高的能量转换效率。
可靠性高:采用成熟的半导体开关器件和电路设计,具有较高的可靠性和稳定性。
H桥电机驱动电路广泛应用于各种需要精确控制电机转动方向和速度的场合,如工业机器人、无人驾驶汽车、无人机、传送带、起重设备等。在这些应用中,H桥电机驱动电路为电机提供了稳定可靠的动力支持,实现了对电机的高效控制。
四、H桥电机驱动电路图
1、基于 IC L293D 的 H 桥电机驱动电路图
简单且使用最广泛的 H 桥电机驱动电路,使用 L293D 绘制在原理图和 PCB 中,我们知道 H 桥是一个切换施加到负载的电压极性的电路(这里负载是电机),因此我们可以改变电机的旋转方向。
这里,H 桥电机驱动器协调负载电机的电源和信号并相应地驱动它。德州仪器 (TI) 的 IC L293D 是一款四路高电流半 H 驱动器。 L293D 能够在 4.5V 至 36V 电压范围内提供高达 600mA 的双向驱动电流。该 IC 可以驱动感性负载,例如电机、继电器、螺线管和双极步进电机。
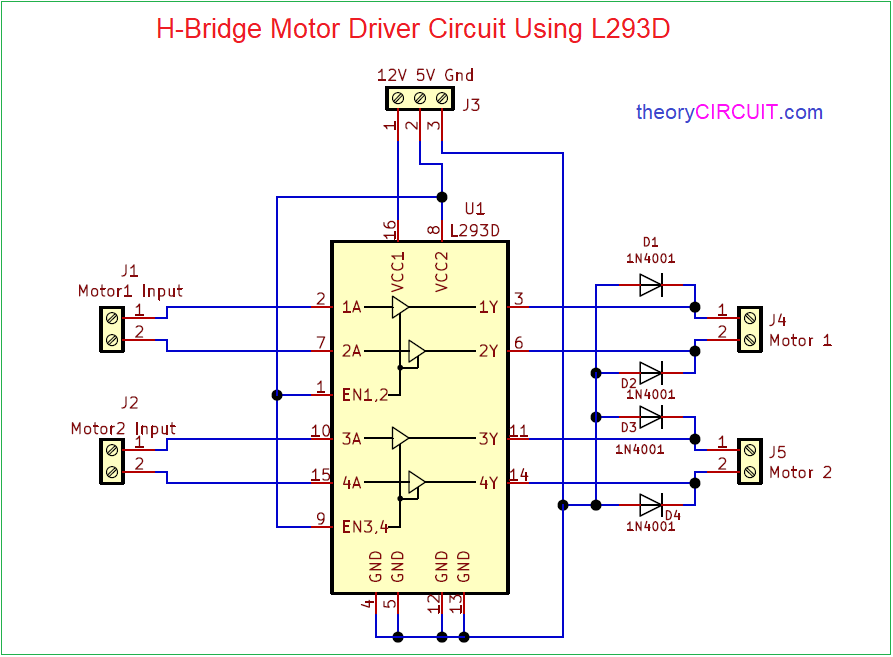
该 IC L293D 采用 16 引脚 PDIP 封装。它具有内部 ESD 保护、高抗噪输入和 4.5V 至 36V 的宽电源电压范围。这种采用L293D的H桥电机驱动电路原理图和PCB设计非常简单,外部元件只有四个二极管。
该电机驱动电路设计用于使用两个输入驱动两个独立的电机。电机 1 输入信号施加到 L293D 的 1A、2A 引脚,电机 1 输出取自 1Y、2Y 引脚。电机 2 输入信号施加到 L293D 的 3A、4A 引脚,电机 2 输出取自 3Y、4Y 引脚。这里 D1 – D4 二极管用作电机的反向电压保护。
2、使用两个 555 定时器 IC 的 H 桥电路驱动电路图
H 桥是一种允许电流在负载上双向流动的电路。这些电路经常用于机器人技术,以允许直流电机向前和向后运行。 H桥电路主要包含4个晶体管,用于双向驱动电机。
我们将向您展示如何使用两个 555 定时器 IC 制作 H 桥电路。 555定时器可用作电流源或电流吸收器。它还可以驱动额定电流高达200mA的负载,这足以驱动小型直流电机。
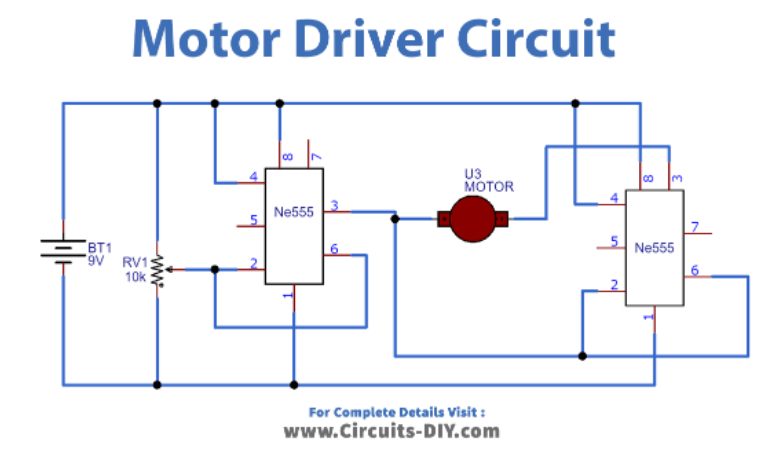
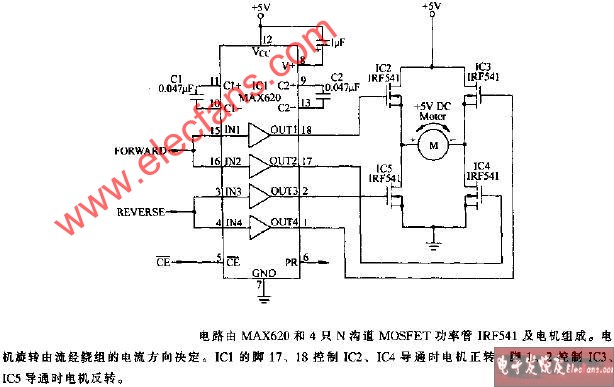
对于该电路,我们将使用两个 555 定时器 IC。两个 IC 的输出将连接到电机的单独端子。其中一个 IC 将向前驱动电机,另一个 IC 将向后驱动电机。电机的方向可以通过电位器来控制。当我们向一个方向移动电位器的旋钮时,直流电机沿一个方向旋转,当我们沿相反方向移动旋钮时,电机也沿相反方向旋转。通过移动电位计的旋钮,我们将改变 IC 引脚 2 和引脚 6 之间的电阻。
利用两个 555 定时器 IC 的 H 桥电机驱动电路图
在电子电路中,H 桥的使用很常见。几乎所有其他电路都在许多应用中采用 H 桥。一般来说,H 桥是一种电子电路,可以在其中双向施加电压。然而,H 桥电路通常适用于高级机械、机器人、功率性能电路等。
然而,该电路主要用于直流电机的运行。尽管如此,平均直流电压可以施加在任一轴承上,以使直流电机向前或向后旋转。随后,直流电机进一步向前或向后移动机器人或任何电机驱动的系统。
这里制作的 H 桥可以利用两个 555 定时器 IC 来制作。 555定时器IC是电子硬件中的一个非凡的部分;它很好地可以用作电流源,也可以用作电流接收器。此外,555定时器IC再次可以驱动高达200mA的电流,这足以驱动小型直流发动机。
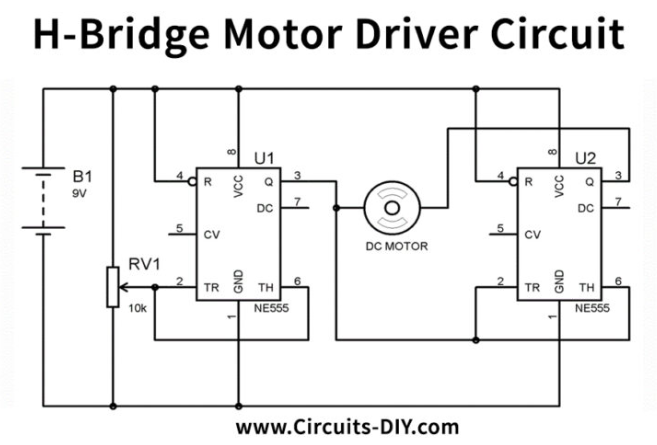
按照上述 H 桥电机驱动电路原理图所示的方式关联电路。当我们向一个方向移动 10k 电位器时,直流电机会朝一个方向旋转,而当我们将电位器移动到反向时,直流电机也会反向转动。
然而,当我们以一种方式移动电位器时,触发引脚 2 处的电压会低于 Vcc/3,这是 555 IC 内部下比较器的同相输入。此后,这将设置触发器的输出,并且 555 继续作为电流源,而另一个 555 则充当电流吸收器。因此,直流发动机在一个方向上旋转转动。
当我们反向移动 Pot 时,阈值 PIN 6 处的电压超过 2/3Vcc,这是 555 IC 内部比较器的同相输入。因此,这会重置触发器的输出,并且 555 继续充当电流吸收器,同时另一个 555 充当电流源,从而使直流引擎反向旋转。
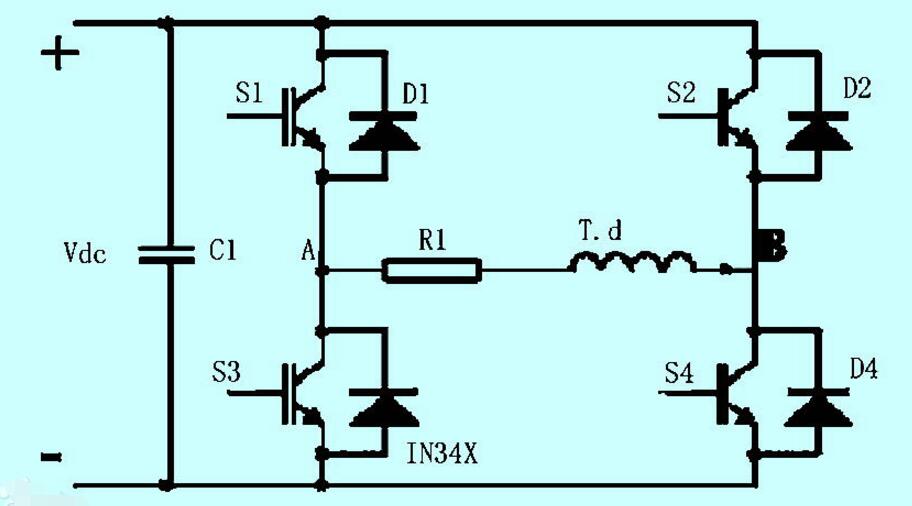
4、使用 MOSFET 的 H 桥电机驱动电路图
在本教程中,我们将使用 MOSFET制作一个简单的 H 桥电机驱动电路。 H 桥是一种配置为控制有刷直流电机的速度和方向的电路。 H桥电机驱动电路的便利之处在于低电流数字信号控制高电流电机。
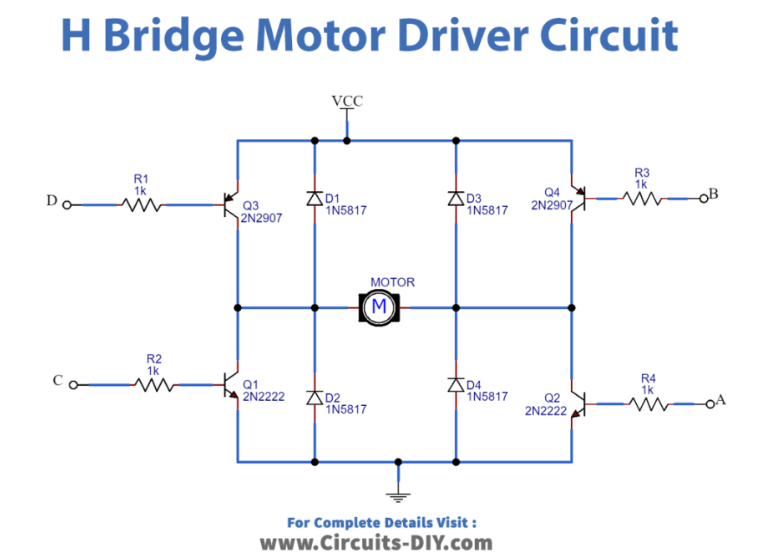
在电路中,我们看到电机周围的 4 个 MOSFET 形成“H”形状。 MOSFET 用作开关并以对角线对形式激活。二极管 D1 至 D4 为来自电机的反电动势提供更安全的路径。从而保护相应的 MOSFET 免受损坏。
该电路的工作原理非常容易理解。当D端接地且A连接至+Vcc时,晶体管Q1和Q4将导通,电流从左向右流过电机。当B端接地、C端接+Vcc时,三极管Q3、Q2导通,电流从右到右流过电机,导致电机反方向旋转。
H桥电机驱动电路的控制方式是电机控制领域中的关键部分,它决定了电机如何响应并执行所需的动作。以下是对H桥电机驱动电路控制方式的详细阐述,包括其原理、分类、特点以及应用场景,力求内容清晰、详细且结构分明。
五、H桥电机驱动电路的控制方式
H桥电机驱动电路的控制方式主要通过调节开关器件(如MOS管、晶体管等)的通断状态,来控制电机两端的电流方向和大小,进而实现对电机的正反转、调速和制动等操作。其控制方式多种多样,下面将逐一进行介绍。
1、开关控制
开关控制是最简单直接的控制方式,通过直接控制H桥电路中开关器件的通断状态,来实现电机的正反转和停止。例如,当需要电机正向转动时,可以闭合Q1和Q4两个开关,断开Q2和Q3;当需要电机反向转动时,则闭合Q2和Q3,断开Q1和Q4。这种控制方式简单易懂,但无法实现电机的平滑调速和精确控制。
2、PWM(脉宽调制)控制
PWM控制是H桥电机驱动电路中常用的控制方式之一,它通过改变PWM信号的占空比来调节电机两端的平均电压,从而实现对电机转速的精确控制。具体来说,PWM信号由一系列高电平和低电平组成的方波构成,通过改变方波中高电平与整个周期的比例(即占空比),可以控制电机两端的平均电压大小。当占空比增加时,电机两端的平均电压增大,电机转速提高;当占空比减小时,电机两端的平均电压减小,电机转速降低。PWM控制具有响应速度快、调速范围广、控制精度高等优点,广泛应用于需要精确控制电机转速的场合。
在PWM控制中,PWM信号的频率也是一个重要的参数。一般来说,PWM信号的频率越高,电机转速的调节越平滑;但过高的频率会增加开关器件的损耗和发热量。因此,在实际应用中需要根据具体情况选择合适的PWM信号频率。
3、电流控制
电流控制是通过检测电机电流并实时调整开关器件的通断状态,使电机电流保持在设定值附近的一种控制方式。在H桥电机驱动电路中,可以通过在电机两端串联电流传感器来检测电机电流,并根据检测到的电流值调整PWM信号的占空比或开关器件的通断状态。电流控制具有响应速度快、控制精度高等优点,特别适用于需要精确控制电机转矩的场合。但电流控制也需要考虑到开关器件的承受能力和电路的复杂度等问题。
4、传感器反馈控制
传感器反馈控制是一种基于闭环原理的控制方式,它通过在电机上安装传感器(如编码器、霍尔传感器等)来实时监测电机的转速、位置等状态信息,并将这些信息反馈到控制器中。控制器根据反馈信息实时调整开关器件的通断状态或PWM信号的占空比等参数,使电机按照预定的轨迹和速度运行。传感器反馈控制具有控制精度高、稳定性好等优点,特别适用于对电机控制精度要求较高的场合。但传感器反馈控制也需要考虑到传感器的安装位置、精度和成本等问题。
不同的控制方式具有不同的特点和适用场景。开关控制简单直接但控制精度低;PWM控制具有响应速度快、调速范围广等优点但需要考虑PWM信号的频率和开关器件的损耗;电流控制精度高但需要考虑开关器件的承受能力和电路的复杂度;传感器反馈控制控制精度高但需要考虑传感器的安装位置和成本等问题。在实际应用中需要根据具体需求和场景选择合适的控制方式或多种控制方式的组合。
-
电路图
+关注
关注
10368文章
10726浏览量
535474 -
MOS管
+关注
关注
108文章
2469浏览量
68228 -
驱动电路
+关注
关注
153文章
1544浏览量
108973 -
H桥电机
+关注
关注
1文章
18浏览量
1168
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论