 泳池清洁机器人的EMC问题整改案例
泳池清洁机器人的EMC问题整改案例
一前言
随着社会经济的发展和人们生活水平的不断提高,公众对文化娱乐设施提出了更高要求,游泳作为一项健身运动受到了越来越多人的欢迎,全球的泳池数量呈持续增长态势。目前泳池清洁市场仍以人工清洁为主,但随着未来人工成本的提升以及泳池清洁机器人自动化、智能化水平的提升,泳池清洁机器人的渗透率将越来越高。随着各种各样泳池清洁机器人的出现,EMC问题也会越来越多,本次给大家分享的案例就是一款泳池清洁机器人。
二实际案例
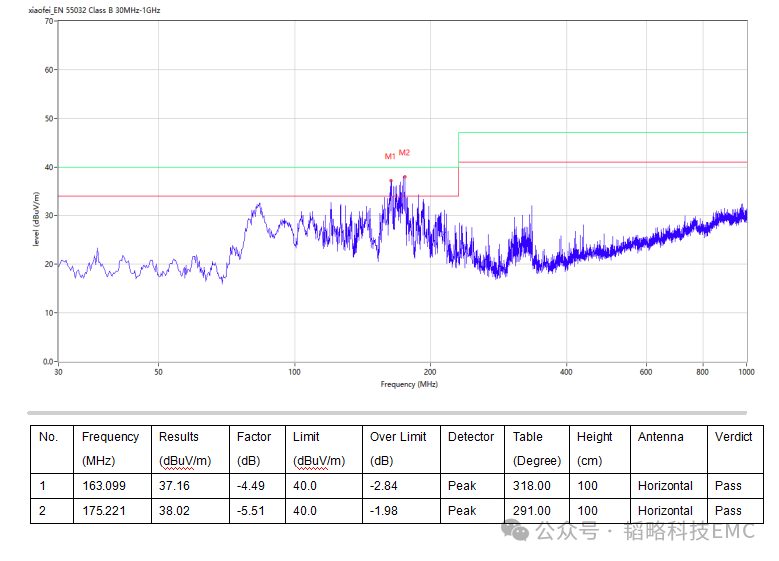
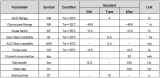
某客户已经接到了来自国外的大批量订单,目前仅有EMC问题没解决完,只需要解决掉EMC问题,就能够直接大批量生产,向国外客户交付机器。该品牌的泳池清洁机器人初始测试数据如下所示:
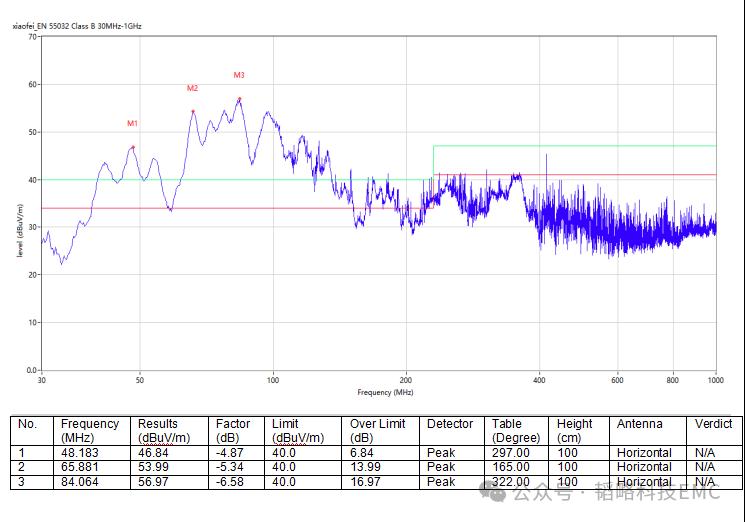
拿到数据的第一步就是分析数据,首先从数据中可以看出该机器的辐射噪声较高,超出限值线将近17db,电源噪声和电机噪声同时存在,至于还有没有其它模块的噪声干扰,暂时不能知道。俗话有说:“工欲善其事,必先利其器”,所以我们不要着急去进行整改,盲目整改只会让自己摸不着头脑,浪费时间,我们应该先把机器的各个功能模块熟悉一遍,理清机器的架构,再开始进行EMC问题的整改。下图是本次案例分享的泳池清洁机器人的架构。
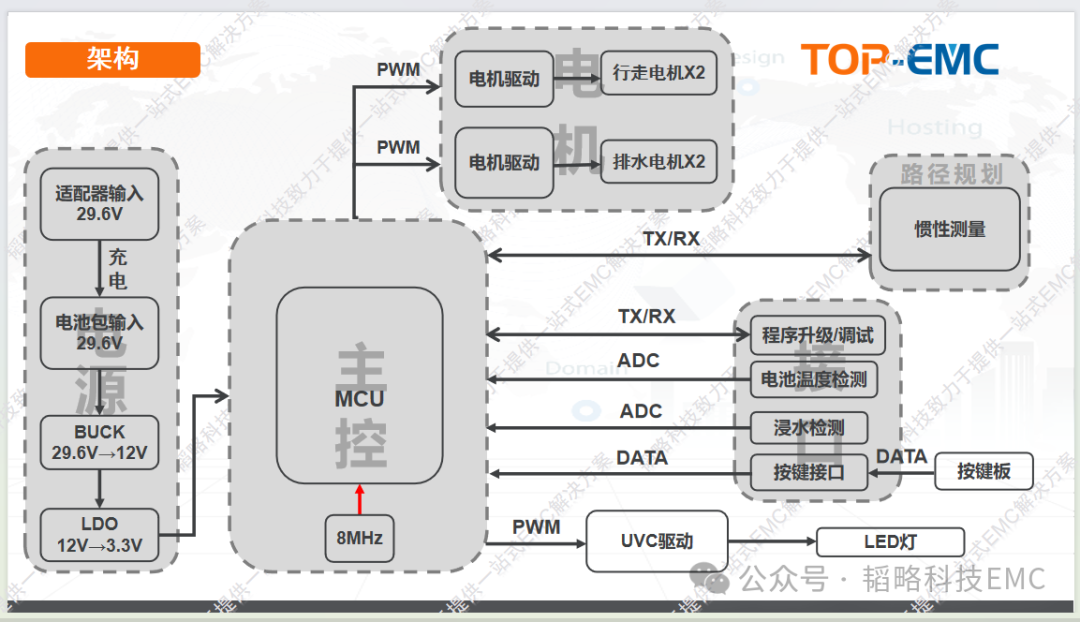
从架构中可以看出,板子上强干扰源不多,BUCK电路,电机驱动电路和电机本身,电池充电电路这三个模块可以算强干扰源,其它模块基本都是一些检测信号,反馈信号之类的低功耗电路,我们先着重于上面分析出来的三个强干扰源模块,若整改完这三个模块还不能解决问题,再去研究其它模块。由于本次的机器较为特殊,需要在水下工作测试,导致我们无法用频谱仪对其进行噪声源定位,所以理清机器架构后再进行整改显得尤为重要。
1.下图为两个排水电机的驱动模块:
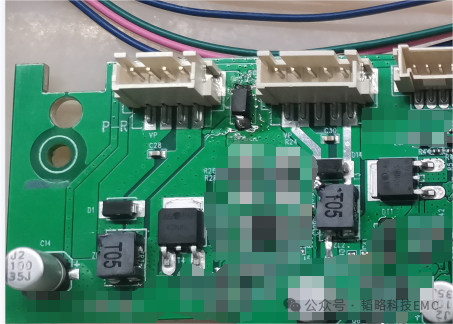
从图中可以很明显地看出共模电感的layout不合理,共模电感的位置距离端口过远,通过查看PCB还发现共模电感的下方也没有去掉覆铜,导致共模电感失效,所以我们在整改的时候把共模电感移到了线束上,等问题解决完再一起改板。另外可以从图中看出MOS管处是没有做滤波处理的,所以我们在MOS这里的DS之间也增加了RC滤波,R选择10欧姆,C选择10nF。
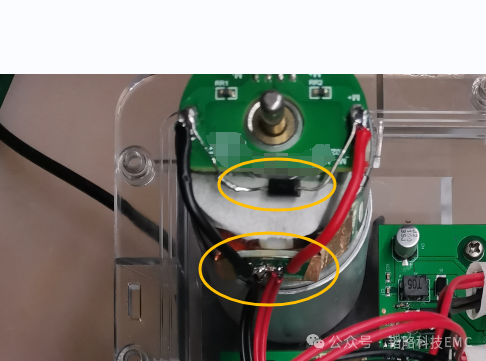
2.处理完电机驱动之后我们接着看电机本身的问题,我司有一款产品BDL专门用来滤除电机的干扰噪声,我们先给电机加上 BDL ,另外由于排水电机是单向工作的,所以我们可以选择在电机正负极之间并联一个二极管来吸收反向电动势,电机整改完图片如下,两个黄色圈圈内为所做措施:
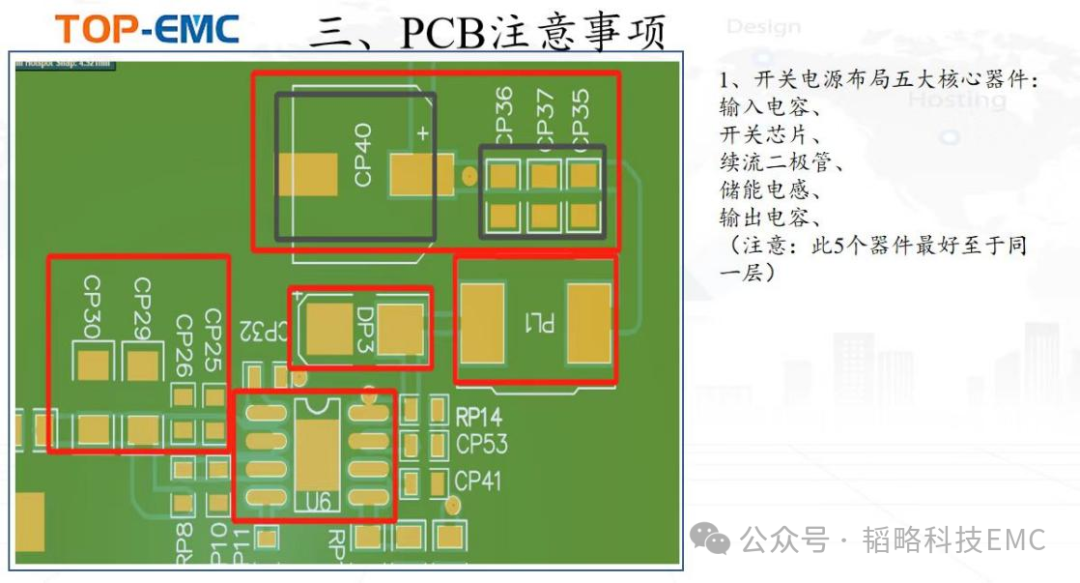
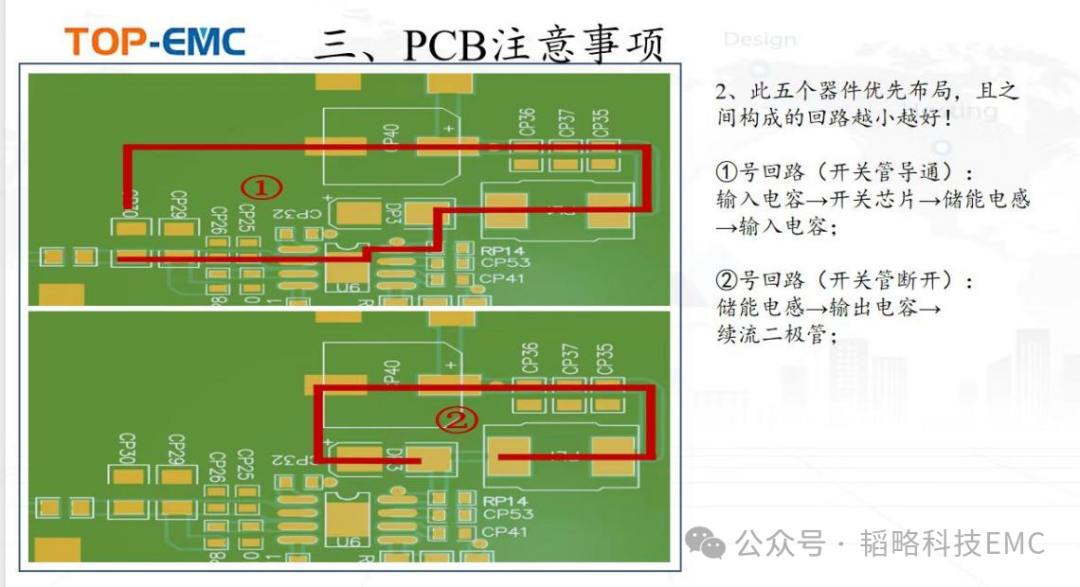
3.处理完电机部分我们接着看BUCK电路的问题,我们在看BUCK电路的原理图部分时发现该电路的滤波电容过少,且参数不对,所以我们在BUCK电路的输入输出部分都增加1nF和100nF电容进行 滤波 ,另外二极管的两端增加了RC滤波,R选择5.6欧姆,C选择1nF,另外BUCK电路的回路也可以做优化,优化推荐如下图:
4.最后剩下一个前面分析的电池模块的问题,我们选择了在电池包输入到板子上的电源线绕 磁环 。
做完以上措施,我们把机器和水箱拿到实验室里面进行测试,测试照片如下:

最后机器在正常工作模式下测试通过,下图为最终的测试数据:
三总结
我们在拿到机器时先不着急进行整改,先把机器的架构理清进行分析,然后再开始整改往往能达到事半功倍的效果。
-
MOS管
+关注
关注
108文章
2439浏览量
67448 -
电机
+关注
关注
142文章
9081浏览量
146267 -
emc
+关注
关注
170文章
3947浏览量
183640 -
清洁机器人
+关注
关注
2文章
55浏览量
6082
原文标题:泳池清洁机器人的EMC问题整改分享
文章出处:【微信号:TLTECH,微信公众号:韬略科技EMC】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
望圆科技深主板IPO获受理!私人泳池清洁机器人市占率全球第三,募资10亿
智能清洁机器人
【深联华杯】基于SLH89F5162单片机的智能清洁机器人
SA:服务机器人销量2022年将达3400万 扫地机器人需求大
什么是基于SLH89F5162的智能清洁机器人?
泳池清洁机器人的眼睛--传感器
爱普生电子助力智能泳池清洁机器人导航方案

安全效率并存:泳池清洁机器人的无线充电进化
智能清洁:泳池机器人的无线充电技术变革
爱普生陀螺仪模块助力智能泳池清洁机器人导航方案

EPSON助力智能泳池清洁机器人导航

爱普生SGPM01助力智能泳池清洁机器人导航方案





 工商网监
工商网监
评论