 爱普生IMU产品在激光雷达测绘中的应用
爱普生IMU产品在激光雷达测绘中的应用
随着雷达应用的快速发展,激光雷达测绘技术也迅速发展,它集成了激光测距系统、全球定位系统(GPS)和惯性导航系统三种技术于一体。其中激光雷达通过发射扫描激光,并检测激光反射,从而测量反射物到激光雷达的距离。在知道自身三维空间坐标系和激光扫描方向的情况下,能够实时获取测量系统周围的高分辨率的三维空间信息。
该技术搭载于无人机上,被广泛应用于电力巡线、地形勘探、矿山测量等领域。
为什么需要惯性测量单元(IMU)
首先,惯性导航系统中一般具有惯性测量单元(IMU),可以用来精确测量出激光雷达自身的姿态数据,从而计算出激光雷达的扫描方向。
其次,在测量过程当中,通常由卫星系统(BDS/GPS/GLONASS/GALILEO)+惯导系统来实现测量激光雷达自身的空间坐标。但是,卫星系统在某些地方没有信号(如隧道),且卫星系统位置信号相对来说是慢速信号,解算位置信息需要更快速的坐标信息更新,因此需要惯性测量单元(IMU)每秒来提供更多位置信息。

惯性测量单元(IMU)对精度的影响
激光雷达测绘设备的指标包含了:系统参数指标,激光雷达单元指标、惯导系统指标等单元。惯性测量单元(IMU)精度决定了姿态和位置精度,因此直接影响系统精度。采用爱普生的M-G370,经过后处理,激光测绘雷达的惯导系统精度可以达到:
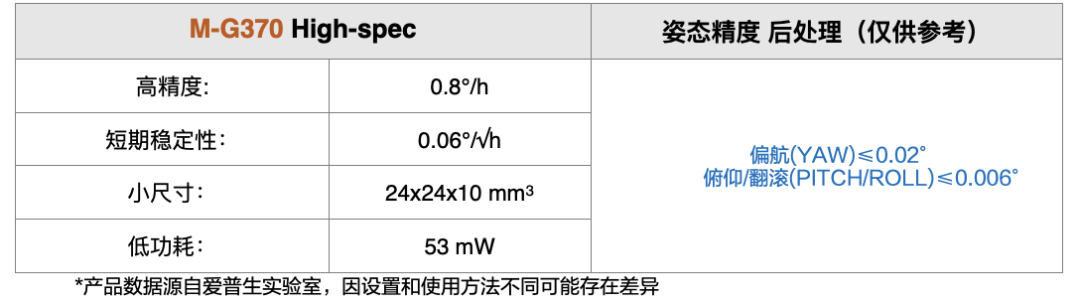
除了高精度,爱普生的惯性测量单元(IMU)还具有体积小、重量轻、功耗低的特点,有助于客户应用的小型化和轻型化的要求;并且产品设计能硬件和软件兼容,性能更稳定,也便于客户维护升级。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
爱普生
+关注
关注
0文章
336浏览量
22271 -
激光雷达
+关注
关注
969文章
4042浏览量
190574 -
IMU
+关注
关注
6文章
321浏览量
45978
发布评论请先 登录
相关推荐

一则消息引爆激光雷达行业!特斯拉竟然在自研激光雷达?
上。 作为对激光雷达最嗤之以鼻的车企,突然被曝光正在自研激光雷达,消息一出,随即引爆了激光雷达行业。禾赛当天股价暴涨36%,速腾聚创次日也大涨17%。 但有意思的是,特斯拉CEO马斯克
全场景适用!TS Spectrum高速数字化仪在激光雷达系统中的应用
一、基本介绍 50多年前,激光技术的发展催生了激光雷达 (LIDAR) 系统,该系统在距离计算方式上取得了突破。激光雷达的原理与雷达所使用的
激光雷达在安防监控中的优势
在现代安防监控系统中,技术的进步不断推动着监控手段的革新。激光雷达(LiDAR)作为一种高精度的遥感技术,近年来在安防监控领域展现出了巨大的潜力。 1. 高精度测距能力
激光雷达在农业中的创新应用
在现代农业中,技术的进步正在改变我们种植、管理和收获作物的方式。激光雷达(LiDAR)技术,作为一种高精度的遥感技术,已经成为这一变革的关键驱动力。 1. 作物监测与管理 激光雷达技术
如何提升激光雷达数据的精度
、航空测绘、环境监测等领域。提升激光雷达数据的精度对于提高这些应用的性能至关重要。以下是一些提升激光雷达数据精度的方法: 硬件优化 : 激光发射器 :使用更高功率的
激光雷达在城市规划中的应用
Detection and Ranging,简称LiDAR)技术作为一种先进的遥感技术,为城市规划提供了一种全新的数据获取方式。 1. 高精度地形测绘 激光雷达技术能够提供高精度的地形数据,这对于城市规划至关重要。传统的地形测绘
激光雷达在无人机中的应用实例
,激光雷达技术因其高精度、高分辨率和强大的穿透能力而成为无人机的关键传感器之一。 1. 测绘与地理信息系统(GIS) 在测绘领域,无人机搭载的激光雷
激光雷达在地形测绘中的作用
在地形测绘领域,精确和高效的数据获取一直是工程师和科学家们追求的目标。随着科技的进步,激光雷达(LiDAR)技术应运而生,为地形测绘带来了革命性的变化。 一、
激光雷达技术的发展趋势
激光雷达(LiDAR,Light Detection and Ranging)技术是一种通过发射激光脉冲并接收其反射来测量距离和速度的遥感技术。它在多个领域,如测绘、环境监测、自动驾驶汽车和无人机等
激光雷达在自动驾驶中的应用
自动驾驶技术正逐渐改变我们的出行方式,而激光雷达(LiDAR)作为实现这一技术的关键传感器之一,其重要性不言而喻。激光雷达通过发射激光脉冲并接收反射回来的光,能够精确测量车辆与周围物体之间的距离,为
爱普生M-G330PDG0惯性测量模块选型
),它结合了高精度、小巧轻便、宽温度工作范围和低功耗设计,使其成为现代科技设备不可或缺的核心组件,爱普生官方推荐的应用场景是激光雷达测绘和稳定云台/动中通天线。当

TS高速数字化仪在激光雷达系统中的应用
一、基本介绍 50多年前,激光技术的发展催生了激光雷达 (LIDAR) 系统,该系统在距离计算方式上取得了突破。激光雷达的原理与雷达所使用的
商用激光雷达产品InnovizOne有什么独特之处
Innoviz 是汽车行业的知名激光雷达制造商,率先开创了激光雷达感知技术。结合摄像头和雷达等其他传感器,Innoviz 能实现真正可脱手、解放双眼的自动驾驶体验。安森美 (onsemi)与 Innoviz 合作,助其推出了首款
晶振在激光雷达系统中的作用有哪些
激光雷达系统需要用精确的时间测量来计算距离和生成高分辨率的3D图像。晶振在激光雷达系统中起着关键作用,主要用于提供稳定的时钟信号和高精度的时间基准。





 工商网监
工商网监
评论