 六维力传感器——人形机器人的力觉
六维力传感器——人形机器人的力觉
导读:六维力传感器可同时测量3个力分量和3个力矩分量,是最完整的多维力传感器形式;而人形机器人主要由旋转关节、线性关节、控制与感知系统、灵巧手以及其他组成,因此将六维力传感器安装在人形机器人的手腕、脚踝和灵巧手等部位,是目前的六维力传感器在人形机器人上的应用趋势。
6月14日召开的特斯拉2024股东大会上,特斯拉CEO马斯克表示,人形机器人将成为工业主力,特斯拉工厂预计在明年部署超过一千个,甚至数千个人形机器人。
就在不久之前,特斯拉展示的第二代人形机器人Optimus已经采用六维力传感器用于手腕和脚踝的力控。通过六维力传感器,Optimus能够精确感知和调整与环境的交互力,从而实现复杂任务的自主操作,如搬运物品、装配零件等。六维力传感器的高精度和快速响应使Optimus在工厂和服务环境中表现出色,显著提高了任务的完成质量和效率。
人形机器人的设计制造目的是为了与人工工具和环境进行交互,从而辅助甚至替代人类的生产生活。在工业领域,人形机器人可以在装配线、仓储管理、精细操作等方面替代人类,提高生产效率,降低人力成本;在家庭服务、医疗康复和公共服务等领域,人形机器人可以帮助人类完成日常任务,提高生活质量;而实现/提升柔顺控制,对人形机器人对于复杂地形的通过能力、人机柔顺交互能力的提升非常重要。
而基于力反馈的柔顺控制就是从力传感器取得控制信号,用此信号去控制机器人,使之响应这个变化而动作。
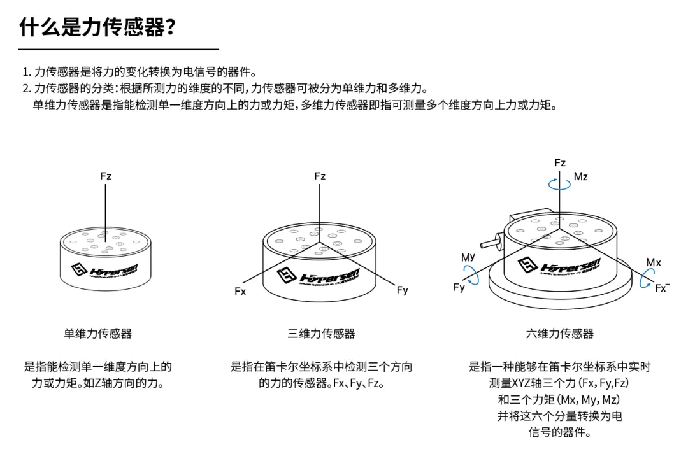
六维力传感器是一种特殊的力觉传感器,可以测量物体在笛卡尔坐标系下三个轴向的力和力矩,是目前最完整的多维力传感器形式;其为机器人提供了类似于人类触觉的功能,使得机器人能够感知和适应外部环境的变化,从而完成更加复杂和精细的任务,是机器人柔顺控制和操作的核心部件。
六维力传感器通常基于应变效应工作,即通过弹性体上的应变片来检测力或力矩引起的微小形变,其运作原理可涉及以下方面:
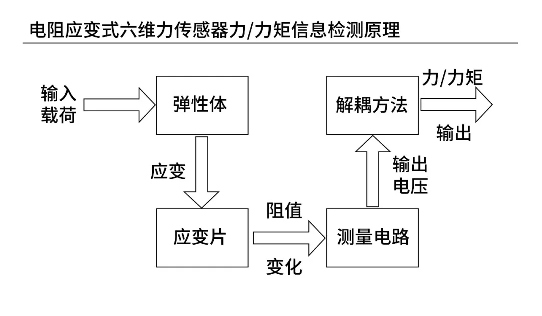
1、应变效应:当弹性体受到力或力矩作用时,其形状变化会导致应变片电阻值的变化。
2、信号转换与放大:应变片检测到的微小电阻变化通过电荷放大器放大,并转化为电信号,这些电信号随后被转换成数字信号。
3、数据处理与解耦:通过数据采集系统进行采集,并进行模数转换(A/D转换)。随后,控制系统中的软件算法对数据进行处理,包括解耦算法,以分离各个方向上的力和力矩,确保测量结果的准确性。
4、标定和校准:为了确保测量的准确性,六维力传感器需要进行精确的标定和校准。这涉及到复杂的六维联合加载技术,确保传感器在所有六个自由度上都能准确测量力和力矩。
目前,业内对实现/提升人形机器人柔顺控制的共识,是将六维力传感器安装在人形机器人的手腕、脚踝和灵巧手等部位,让其持续检测人形机器人与环境之间的多维交互力和力矩,并最终在运控规划、姿态调整、力度感知等功能中起到重要作用。
通过装配六维力传感器,人形机器人将实现更高级别的自主操作,能够直接响应指令,执行复杂任务。
作为人形机器人中的关键零部件,六维力传感器的关键性能参数直接影响人形机器人的运作效果。
1、灵敏度:灵敏度决定了传感器对力和力矩变化的响应程度。高灵敏度的传感器可以更准确地检测到微小的力变化,这对于需要精细操作的任务非常重要。
2、精度:精度反映了传感器测量结果的准确性。它包括了测量结果的重复性和与理论值的接近程度。高精度的传感器可以提供更可靠的数据,从而提高机器人操作的准确性。
3、串扰:串扰指标用来衡量多维力传感器各测量方向间的耦合影响。低串扰可以减少不同测量方向之间的相互干扰,提高测量的准确性。
4、非线性:力传感器的非线性指的是力传感器输出信号与输入的实际力之间不是线性关系的一种特性。理想情况下,力传感器的输出信号与输入力成正比,即输出信号与输入力之间的关系可以用一条直线表示。但在实际应用中,由于各种原因(如材料的非线性、结构变形、电气特性变化等),力传感器的输出信号往往不是严格的线性关系,这就形成了非线性误差。
5、迟滞:迟滞是指传感器在加载和卸载过程中输出信号的差异,它影响测量结果的一致性。
6、零点:零点稳定性是指在没有外力作用时传感器输出信号的稳定性,它影响传感器在长时间运行中的可靠性。
7、分辨率:分辨率是传感器能够区分的最小力或力矩变化,高分辨率对于执行精细操作尤为重要。
8、过载能力:过载能力指传感器能够承受的最大力超过其额定量程的能力,而不会对传感器造成损坏。
9、温漂:温度漂移是指由于温度变化引起的传感器输出信号的变化。低温漂可以保证传感器在不同温度环境下的稳定性。
10、动态响应:动态响应能力决定了传感器对快速变化的力和力矩的跟踪能力,这对于需要快速反应的应用场景非常重要。
这些参数共同决定了六维力传感器的性能,进而影响了人形机器人在执行任务时的灵活性、稳定性和准确性;因此,为人形机器人特定部位功能,进行六维力传感器的性能匹配选型,是机器人厂商在设计和制造过程中不可或缺的关键步骤。
【海伯森HPS-FT系列六维力传感器】
自2016年发布第一款六维力传感器产品以来,海伯森持续投入研发,通过新材料应用、技术创新、软件升级等方式实现产品的不断迭代优化,结合市场大范围拓展带来的大量产品应用经验,今年成功推出新一代六维力传感器产品HPS-FT080,广受市场好评。

【关键技术难点及解决方案】
01高精度力矩测量
挑战:六维力传感器需要在多个自由度上同时测量力和力矩,其精度要求极高。
解决方案:海伯森选择高灵敏度和高线性度的应变片材料,并采用优化的布置方式,有效分离各个方向上的力和力矩,减少耦合效应。通过先进的制造工艺,确保应变片与弹性体之间的牢固结合,提高测量精度。
02低温漂和零点稳定性
挑战:温度变化对传感器输出信号的影响显著,必须在广泛的温度范围内保持稳定的输出。
解决方案:海伯森在传感器内部集成高精度的温度补偿算法,使用具有热稳定性的材料,确保传感器在不同温度下输出稳定。通过严格的温度测试和优化,减少温度漂移对测量精度的影响。
03高动态响应和抗冲击能力
挑战:传感器需要能够实时响应快速变化的力和力矩,同时具备良好的抗冲击能力。
解决方案:海伯森在结构设计上采用高刚性材料,并引入减振技术,提升传感器的抗冲击能力。通过优化信号处理电路,确保传感器具备高动态响应能力,能够迅速跟踪快速变化的力和力矩。
04低串扰和高线性度
挑战:多维力传感器各测量方向间的耦合影响(串扰)会降低测量精度。
解决方案:海伯森采用先进的结构解耦设计和高性能的嵌入式微处理器,结合复杂的补偿算法,减少各测量方向间的耦合,确保高线性度和低串扰。
05高分辨率和灵敏度
挑战:高分辨率和灵敏度是六维力传感器的核心性能指标,决定了传感器能否检测到微小的力和力矩变化。
解决方案:海伯森使用高增益、低噪声的信号处理电路,并精益求精地设计应变片材料和结构,确保传感器具备高分辨率和高灵敏度。
06过载保护和长寿命设计
挑战:传感器在使用过程中难免会遇到超过额定量程的力,这就要求传感器具有强大的过载保护能力。
解决方案:海伯森通过优化弹性体结构和采用先进的力传递路径设计,提高传感器的过载保护能力。选择高耐用性的材料和改进制造工艺,确保传感器的长期可靠性和使用寿命。
【行业应用】
海伯森HPS-FT系列六维力传感器在多个行业领域中展现了其卓越性能和广泛应用:
工业机器人:在工业生产线上,六维力传感器帮助工业机器人实现高精度的装配、焊接和搬运任务。传感器提供的实时力反馈数据,使机器人能够精确控制力和位置,提高生产效率和产品质量。
协作机器人:协作机器人需要与人类紧密协作,六维力传感器确保机器人在执行任务时能够感知并响应外界的力变化,保证安全性和操作灵活性。
外骨骼机器人:在医疗康复和辅助领域,六维力传感器用于外骨骼机器人的关节部位,提供力反馈数据,帮助患者进行精准的康复训练,增强运动能力。
医疗康复机器人:在康复治疗中,六维力传感器用于监测和控制康复机器人的操作力,确保治疗过程的安全和有效性,为患者提供个性化的康复方案。
柔性夹爪和机器人关节:在自动化生产中,六维力传感器应用于柔性夹爪和机器人关节,实现对工件的精细抓取和搬运,适应各种复杂工况。
自动化测量与控制:在测量和控制系统中,六维力传感器用于精确测量多维力和力矩,提供高精度的数据支持,应用于风洞测试、实验室研究等领域。
六维力传感器是人形机器人技术进步的核心,其通过精确测量力和力矩,赋予机器人更高的操作精度和灵活性。这些传感器的动态响应能力,为机器人执行复杂任务提供了强有力的技术支持,是实现机器人智能化和自动化不可或缺的组件。
结语:展望未来,随着研发的持续投入及技术的不断突破,海伯森HPS-FT系列六维力传感器将继续以其微型化、智能化和高性价比进一步推动其在各个领域的应用,并在人形机器人的多场景应用中展现出更加卓越的性能,不仅提升机器人的适应性和可靠性,也将为人形机器人的进一步发展和智能制造的创新贡献关键力量。
作为中国领先的高端智能传感器企业,海伯森技术(深圳)有限公司专注于高性能工业传感器的技术创新和探索,具备光、机、电、算技术综合应用于传感器产品的研发能力和规模化生产能力,主营产品包括3D闪测传感器、3D线光谱共焦传感器、点光谱共焦传感器、六维力传感器、激光对刀仪、超高速工业相机、激光对针传感器等。
-
传感器
+关注
关注
2557文章
51728浏览量
758787 -
特斯拉
+关注
关注
66文章
6352浏览量
127281 -
测量
+关注
关注
10文章
5014浏览量
112186 -
人形机器人
+关注
关注
3文章
558浏览量
16955
发布评论请先 登录
相关推荐
发力机器人传感器领域,华培动力拟设立机器人全资子公司

伺服电动缸在人形机器人中的应用
洞察:人形机器人传感器产业链概览

A股上市公司凯尔达宣布控股六维力传感器企业 布局人形机器人关键核心部件
成立15年,鑫精诚这家深圳传感器公司获亿元天使融资(六维力传感器这条赛道真火)

6L2A六维力传感器为机器人提供全方位解决方案

一文讲透人形机器人常用的四类感知传感器:视觉、力/力矩、触觉、IMU
FUTEK传感器在人形机器人中的应用


人形机器人领域六维力传感器市场规模将达138.40亿元






 工商网监
工商网监
评论