 瑞萨RA2L1系列CAN通信应用
瑞萨RA2L1系列CAN通信应用
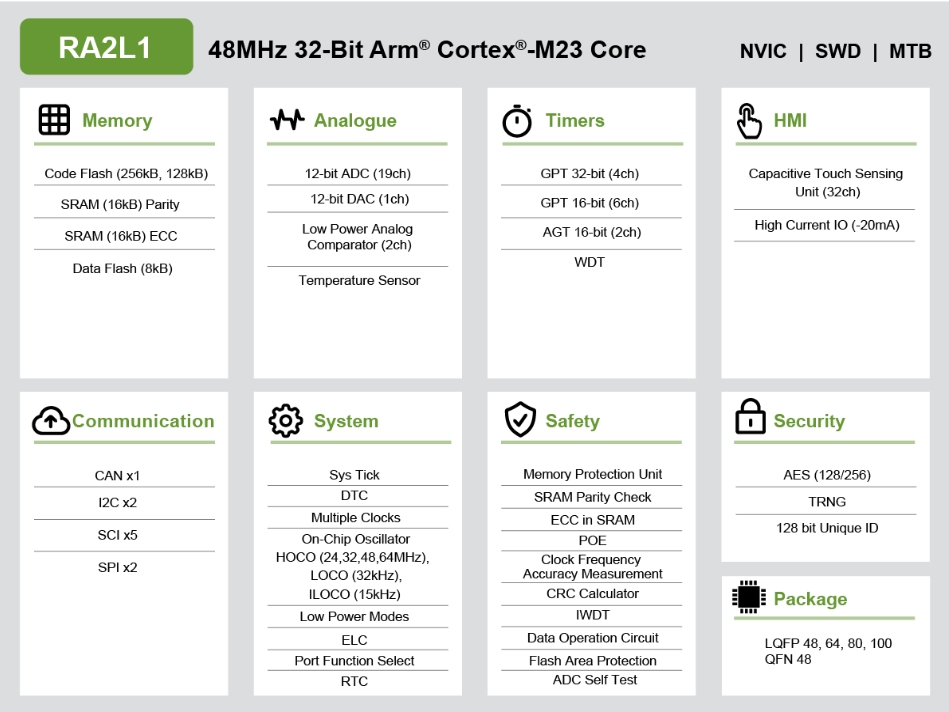
RA2L1产品组基于ArmCortex-M23 核心(现今 ArmCortex-M系列中功耗最低的 CPU)。这款产品采用优化的制程和瑞萨电子的低功耗工艺技术,是业界一流水平的超低功耗微控制器。RA2L1产品组能够支持1.6V至5.5V宽电压工作,CPU时钟频率最高48MHz,且运行模式电流和待机模式电流更低。RA2L1产品群配备了增强型电容式触摸感应单元(CTSU2)、CAN控制器局域网总线,串行通信接口、高精度模拟电路和定时器。产品封装从48引脚到100引脚。
控制器局域网CAN模块简介
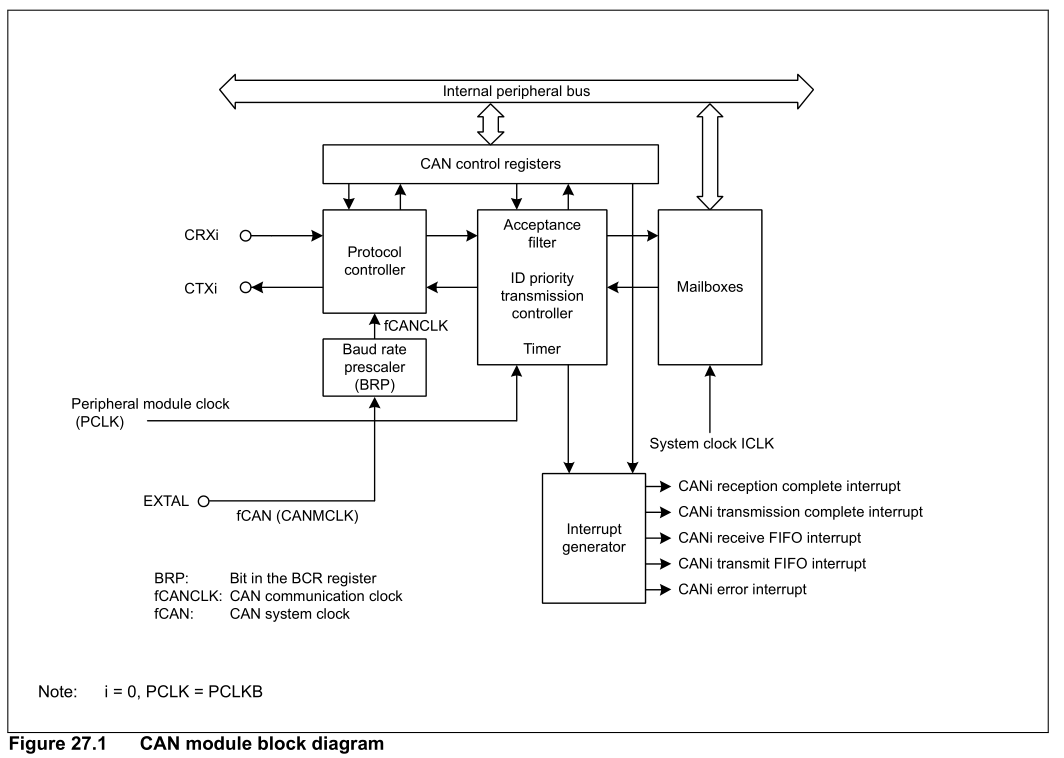
控制器局域网(CAN)模块使用基于消息的协议在电磁噪声应用中的多个从机和主机之间接收和传输数据。
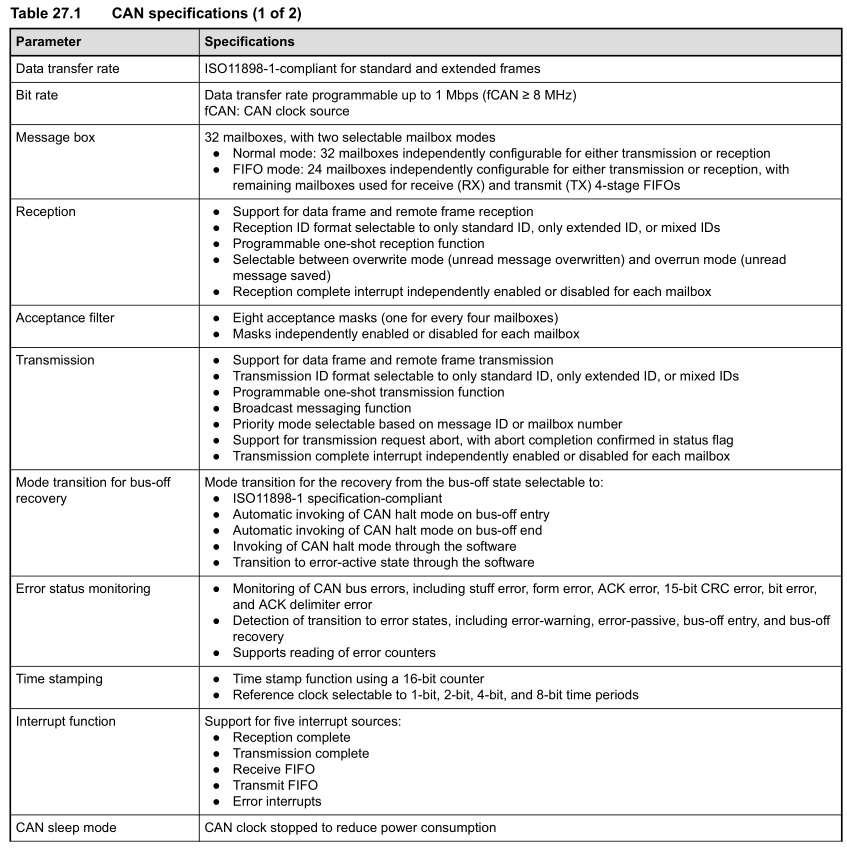
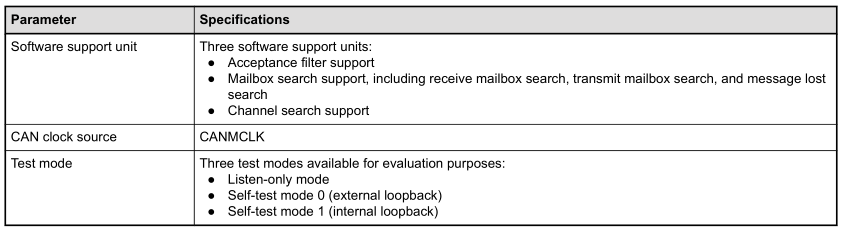
该模块符合ISO11898-1(CAN2.0A / CAN2.0B)标准,最多支持32个邮箱,可配置为普通邮箱和FIFO模式下的发送或接收。支持标准(11位)和扩展(29位)消息格式。CAN模块需要额外的外部CAN收发器。
CAN模块框图

RA2L1 CAN通信应用例程
使用官方e2studio开发工具创建RA2L1工程,并添加CAN外设模块底层应用。
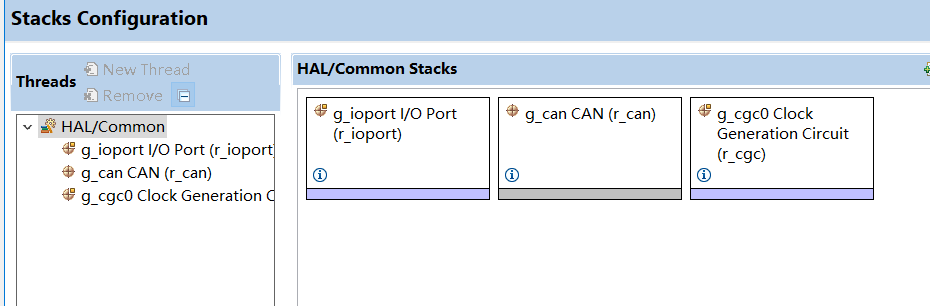
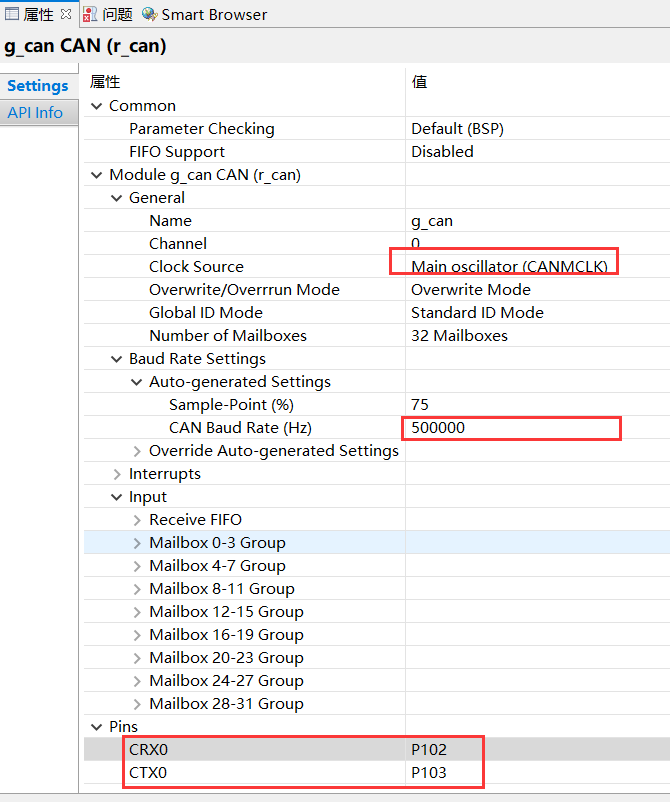
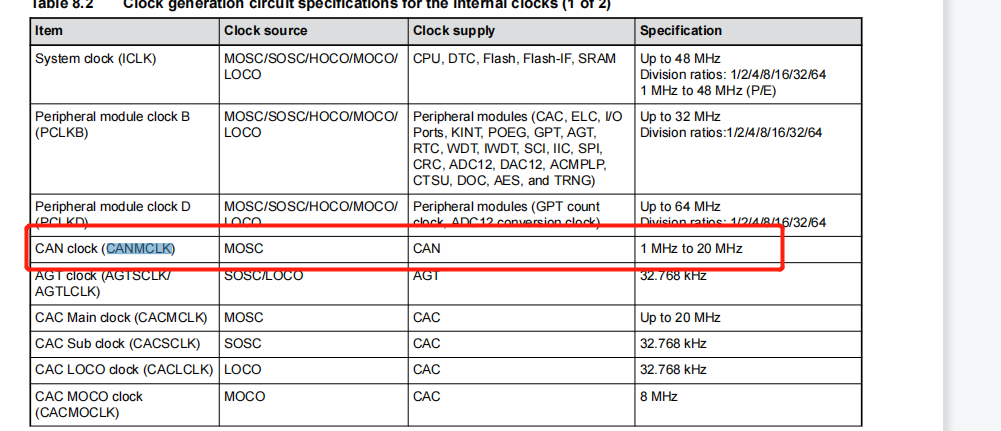
配置CAN模块参数(包括通信速率、引脚配置等)。
CAN应用参考代码
#define WAIT_TIME (500U) //wait time value #define CAN_MAILBOX_NUMBER_TX (0U) //mail box number #define CAN_MAILBOX_NUMBER_RX (1U) #define CAN_FRAME_TRANSMIT_DATA_BYTES (8U) //data length #define ZERO (0U) /* Private global variables*/ /* Flags, set from Callback function */ static volatile bool b_can_tx = false; //CAN transmission status static volatile bool b_can_rx = false; //CAN receive status static volatile bool b_can_err = false; //CAN error status /* CAN frames for tx and rx */ static can_frame_t g_can_tx_frame; //CAN transmit frame static can_frame_t g_can_rx_frame; //CAN receive frame void hal_entry(void) { /* TODO: add your own code here */ fsp_err_t err = FSP_SUCCESS; uint32_t time_out = WAIT_TIME; // time out uint8_t can_tx_msg[CAN_FRAME_TRANSMIT_DATA_BYTES] = {0,1,2,3,4,5,6,7}; uint8_t can_rx_msg[CAN_FRAME_TRANSMIT_DATA_BYTES] = {0}; /* Initializes the CGC module. */ err = R_CGC_Open(&g_cgc0_ctrl, &g_cgc0_cfg); /* Handle any errors. This function should be defined by the user. */ assert(FSP_SUCCESS == err); /* Start the CGC_CLOCK_MAIN_OSC. */ err = R_CGC_ClockStart(&g_cgc0_ctrl, CGC_CLOCK_MAIN_OSC, NULL); assert(FSP_SUCCESS == err); /* Initialize CAN module */ err = R_CAN_Open(&g_can_ctrl, &g_can_cfg); /* Error trap */ if(FSP_SUCCESS != err) { __asm("BKPT #0\n"); } g_can_tx_frame.id = CAN_MAILBOX_NUMBER_TX; g_can_tx_frame.type = CAN_FRAME_TYPE_DATA; g_can_tx_frame.data_length_code = CAN_FRAME_TRANSMIT_DATA_BYTES; /* copy the tx data frame with TX_MSG */ memcpy((uint8_t*)&g_can_tx_frame.data[ZERO], (uint8_t*)&can_tx_msg[ZERO], CAN_FRAME_TRANSMIT_DATA_BYTES); err = R_CAN_Write(&g_can_ctrl, CAN_MAILBOX_NUMBER_TX, &g_can_tx_frame); /* Error trap */ if (FSP_SUCCESS != err) { err = R_CAN_Close(&g_can_ctrl); if (FSP_SUCCESS != err) { __asm("BKPT #0\n"); } } while(1) { /* check if receive flag is set */ if (true == b_can_rx) { /* Reset flag bit */ b_can_rx = false; g_can_rx_frame.data[CAN_FRAME_TRANSMIT_DATA_BYTES-1] = g_can_rx_frame.id; /* Transmit the rx data frame as acknowledging the data transfer is successful */ err = R_CAN_Write (&g_can_ctrl, CAN_MAILBOX_NUMBER_TX, &g_can_rx_frame); /* Error trap */ if (FSP_SUCCESS != err) { err = R_CAN_Close(&g_can_ctrl); if (FSP_SUCCESS != err) { __asm("BKPT #0\n"); } } /* wait for transmit flag bit to set */ while ((true != b_can_tx) && (time_out--)); if (0 == time_out) { __asm("BKPT #0\n"); } /* Reset flag bit */ b_can_tx = false; } } } void can_callback(can_callback_args_t *p_args) { switch (p_args->event) { case CAN_EVENT_TX_COMPLETE: { b_can_tx = true; //set flag bit break; } case CAN_EVENT_RX_COMPLETE: { b_can_rx = true; //copy the received data to rx_frame memcpy(&g_can_rx_frame, p_args->p_frame, sizeof(can_frame_t)); break; } case CAN_EVENT_MAILBOX_MESSAGE_LOST: //overwrite/overrun error event case CAN_EVENT_BUS_RECOVERY: //Bus recovery error event case CAN_EVENT_ERR_BUS_OFF: //error Bus Off event case CAN_EVENT_ERR_PASSIVE: //error passive event case CAN_EVENT_ERR_WARNING: //error warning event { b_can_err = true; //set flag bit break; } } }
CAN通信实测验证
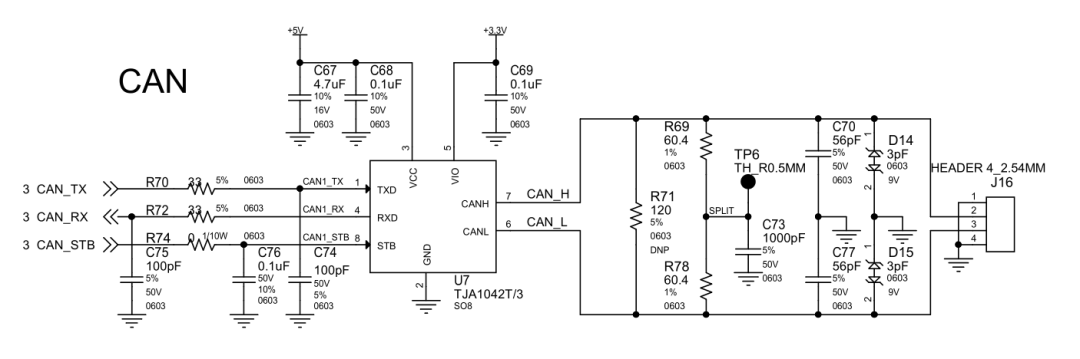
RA2L1芯片内部只有CAN控制器,需要与外部CAN设备通信时,还需要外接CAN收发器。
CAN收发器应用参考原理图
使用USB-CAN工具测试CAN通信
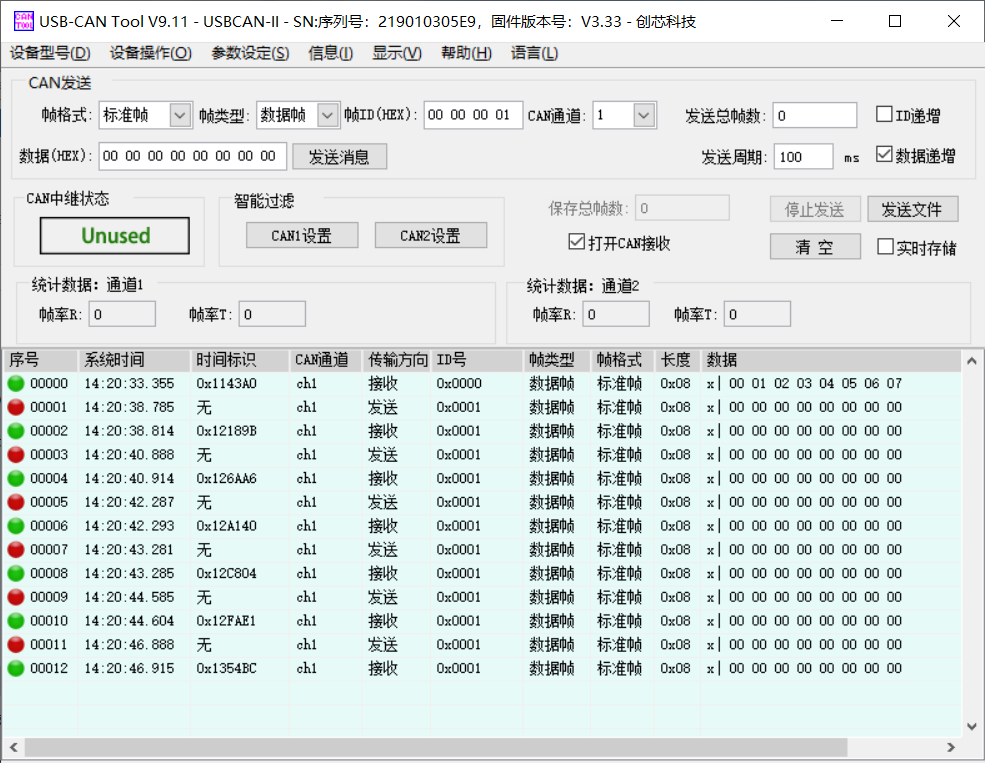
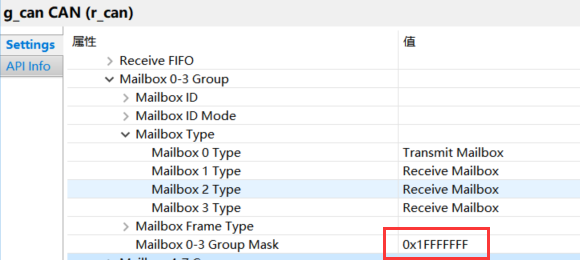
a. 接收不到ID为0的数据
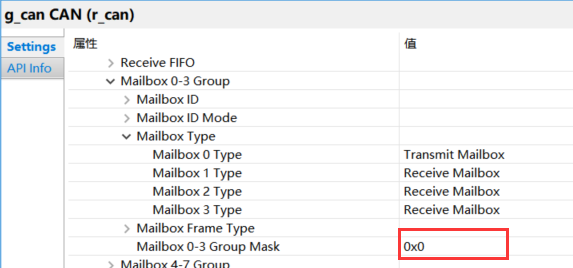
b. 禁止Mask功能后,可接收所有ID的数据.
-
mcu
+关注
关注
146文章
16949浏览量
350112 -
CAN通信
+关注
关注
5文章
93浏览量
17804 -
瑞萨
+关注
关注
34文章
22285浏览量
85986
发布评论请先 登录
相关推荐
瑞萨RA2L1系列MCU简介和CAN通信应用例程
【瑞萨RA2系列开发板体验】瑞萨RA2L1试用笔记
Renesas RA2L1开发板之PWM方波配置相关资料推荐
瑞萨RA2L1系列MCU在BMS电池管理系统的应用

产品 | 瑞萨超低功耗RA2L1 MCU产品群,具有高级电容式触摸感应功能,打造经济节能的IoT节点HMI应用







 工商网监
工商网监
评论