 施耐德全新EtherCAT运动控制器M310介绍
施耐德全新EtherCAT运动控制器M310介绍

在制造业的蓬勃发展下,高性能运动控制器成为提升生产效率、保障产品质量的关键设备之一。M310是施耐德电气新一代高性能运动控制器,它基于Intel X86硬件平台和Codesys V3.5 SP19软件平台开发,支持EtherCAT总线,拥有强大算力、高易用性和高灵活度,提供最大16轴,32轴和64轴同步控制三种机型,为打造高端制造设备及自动化产线提供了高性能的EtherCAT运动控制解决方案。
 施耐德全新EtherCAT运动控制器M310
施耐德全新EtherCAT运动控制器M310一、施耐德M310技术特点
1.超高性能:强大的运算及运动控制能力
施耐德M310拥有强大的运算及运动控制能力,其CPU处理速度高达3.3 ns/单条指令,同步控制周期分别可达16轴/250us,32轴/0.5ms,64轴/1ms,满足了客户对响应速度、控制精度的不同需求。
2.便携易用:基于Codesys 3.5 SP19软件平台开发
施耐德M310基于标准的Codesys3.5 SP19软件平台开发,符合PLCopen和 IEC-61131-3标准,支持运动控制功能和功能块封装,并支持LD/IL/FBD/ST/SFC/CFC等主流编程语言,用户可以方便地利用标准编程语言和工具开发,不仅节省时间,还能根据实际需求进行深度开发,实现更广泛的应用场景。
 施耐德全新EtherCAT运动控制器M310
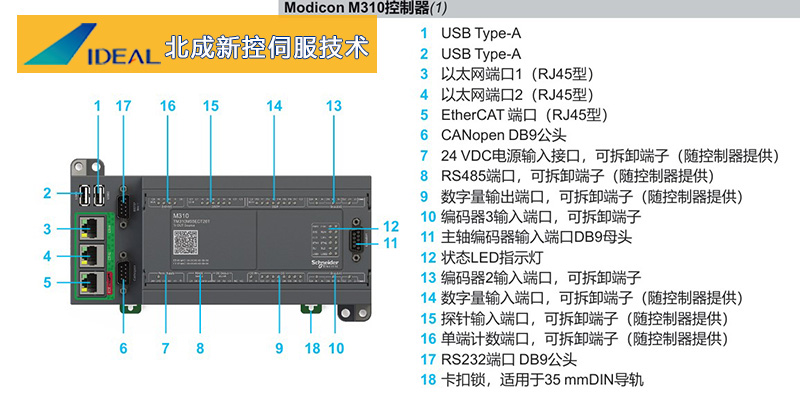
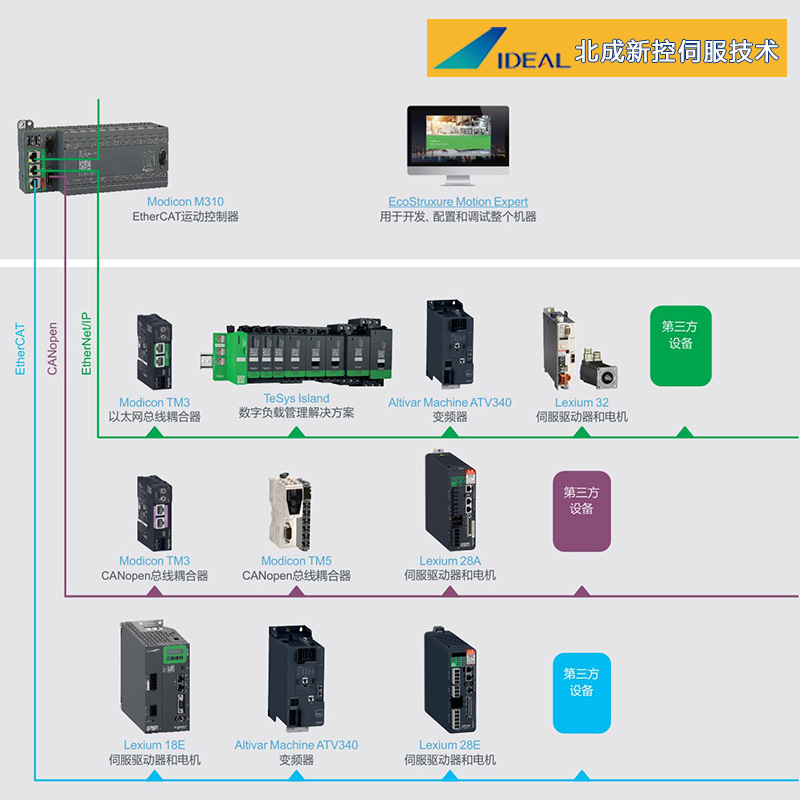
施耐德全新EtherCAT运动控制器M310施耐德M310提供了丰富的嵌入式通讯接口,包括以太网、EtherCAT、CANopen、RS485和1个RS232C等等,不仅提高了逻辑控制和运动控制应用的灵活性,还能无缝嵌入现有的施耐德电气或第三方控制系统,实现数据的实时传输和共享,轻松适应各种复杂的工业自动化环境。
• 2个独立千兆RJ45以太网端口,支持EtherNet/IP、 Modbus TCP
• 1个百兆RJ45 EtherCAT端口
• 2个串口(1个RS485和1个RS232C),支持 Modbus RTU/ASCII主站和/Modbus RTU从站
• 1个CANopen主站端口,最大工作频率1Mbps
• 1个主轴编码器输入/2个增量型编码器输入
 施耐德全新EtherCAT运动控制器M310
施耐德全新EtherCAT运动控制器M310二、施耐德M310在双头灌装旋盖机的应用
施耐德M310在工业自动化领域应用广泛,如包装、电子电工、机加工等行业。施耐德M310在双头灌装旋盖机上的应用,实现了灌装和旋盖过程的精准控制,确保了产品的稳定性和一致性,提高了生产效率。未来,北京北成新控将继续携手施耐德电气,为工业自动化打造高适配性、高稳定性的运动控制系统解决方案。
北京北成新控伺服技术——台湾apex减速机,ABB伺服电机、变频器,日本哈默纳科减速机、执行元件北京核心代理商!提供人机界面,运动控制,交直流驱动,机械传动,光栅测量成套运动控制技术解决方案!
-
控制器
+关注
关注
114文章
17894浏览量
195395 -
运动控制器
+关注
关注
2文章
495浏览量
26168 -
施耐德
+关注
关注
5文章
170浏览量
25042 -
ethercat
+关注
关注
20文章
1587浏览量
46274
发布评论请先 登录

探索MB9A310A系列32位ARM® Cortex® - M3 FM3微控制器的魅力

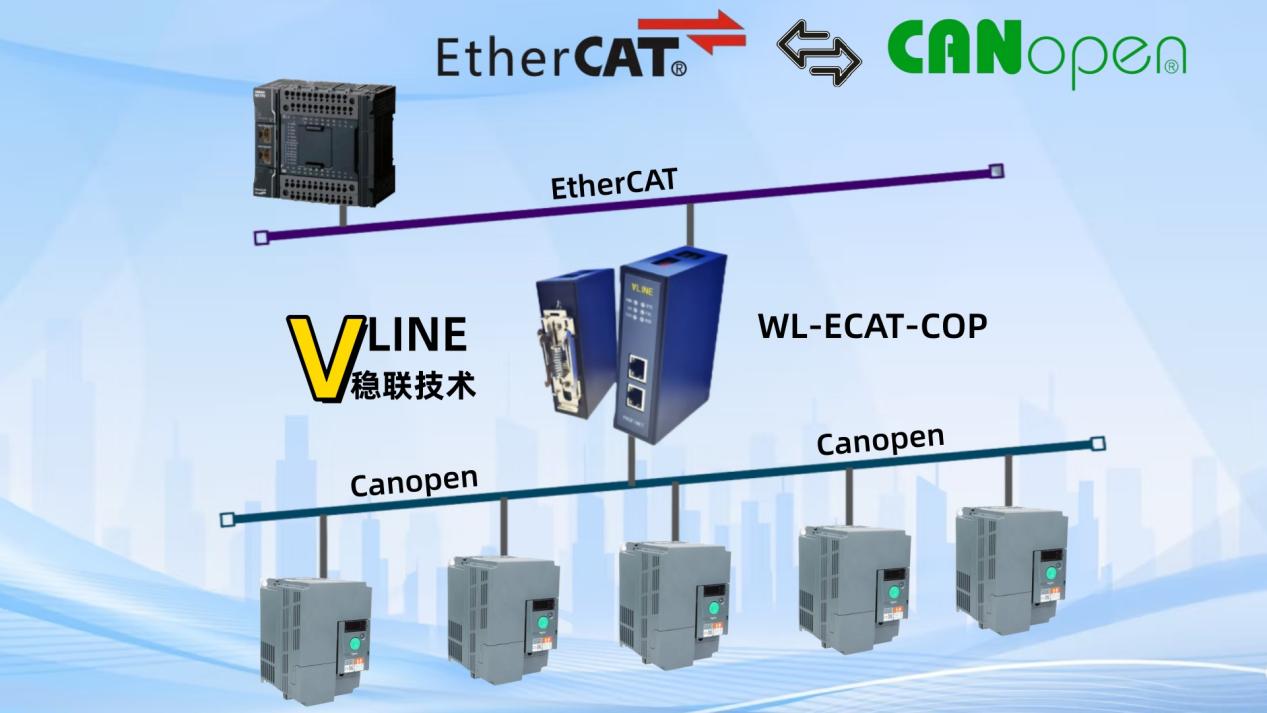
协议桥接新范式:稳联技术打通EtherCAT与CANopen,赋能施耐德变频器
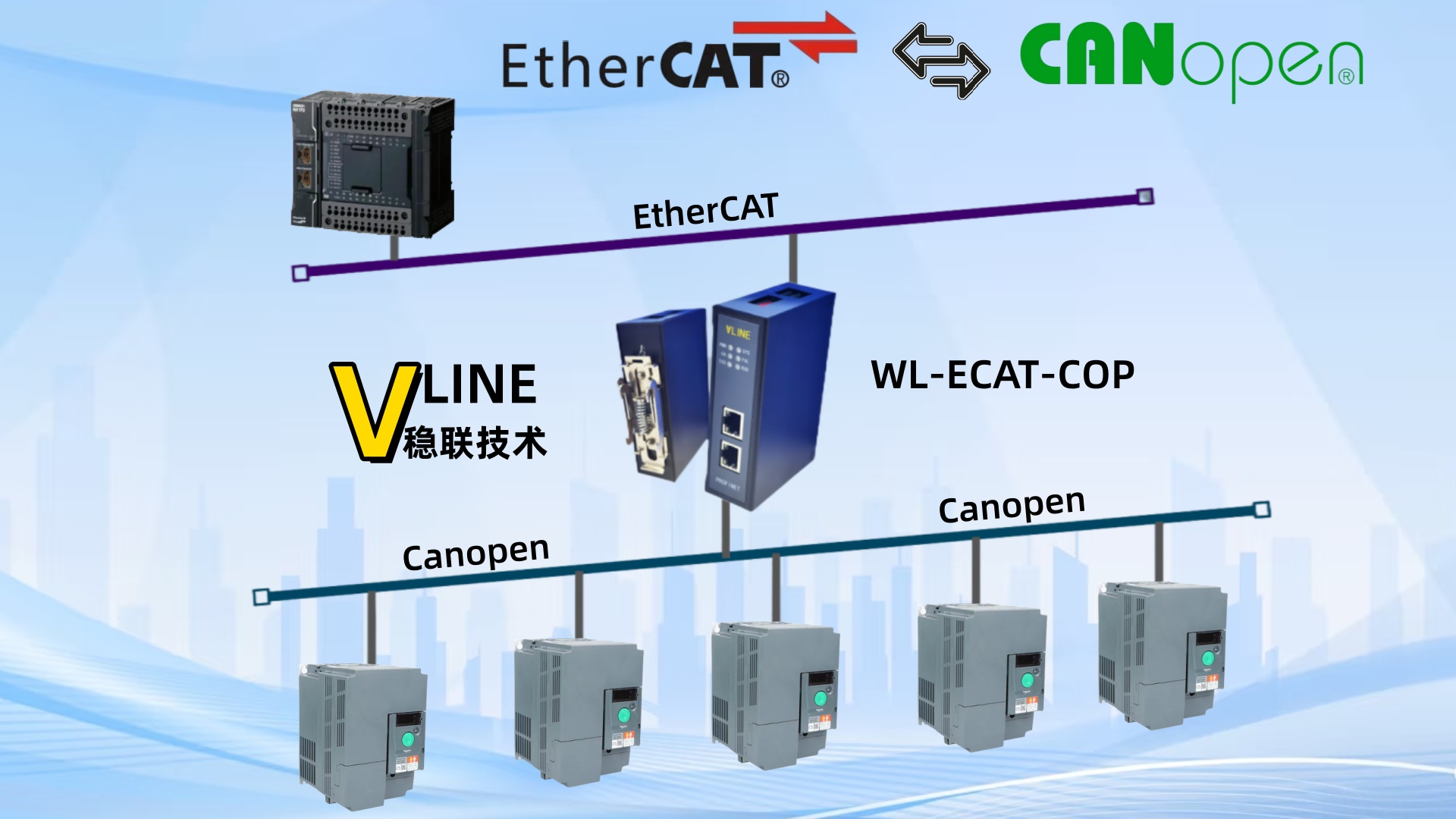
协议桥接新范式:稳联技术打通EtherCAT转CANopen赋能施耐德变频器






评论