 人形机器人关节的磁编码器理想选择——AS5048 产品介绍
人形机器人关节的磁编码器理想选择——AS5048 产品介绍
人形机器人作为另一个颠覆性产品赛道,在满足社会发展需求的背景下迎来了巨大的发展机遇。预计到2035年,人形机器人市场将保持50%以上的高增速发展,全球需求总量将达到100-200亿台,为人形机器人开辟了巨大的市场空间。
作为关键组件之一的传感器,其性能直接影响到机器人的精度、稳定性和响应速度。AS5048是一款高精度的磁编码器,因其卓越的性能和多功能性,成为人形机器人市场的理想选择。
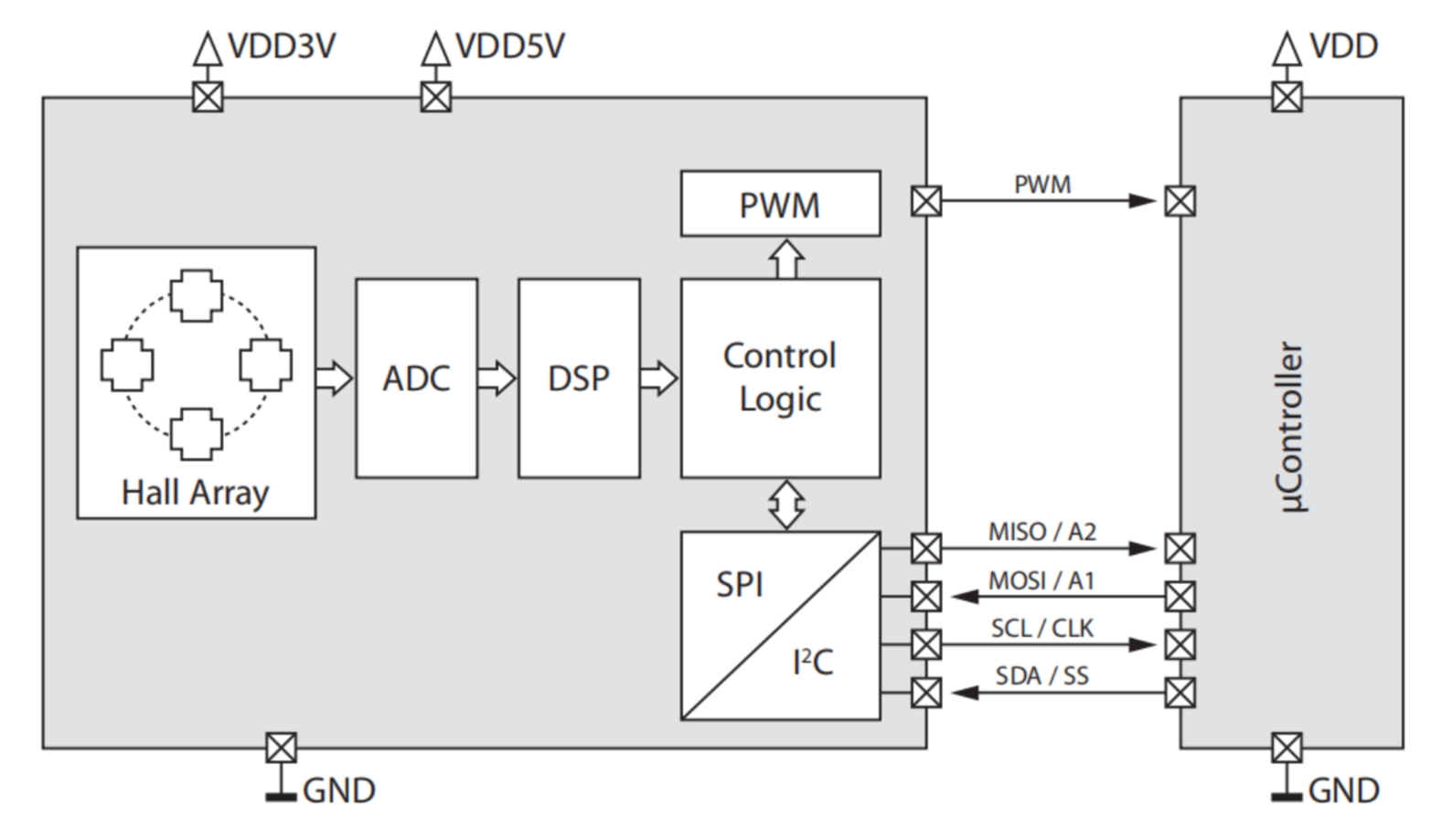
AS5048是易于使用的360° 角度位置传感器,具有14位高分辨率输出。系统精度最高可达0.05°(线性化及平均值由外置微控制器计算情况下)。传感器IC由霍尔传感器、模拟数字转换器和数字信号处理器组成,可测量磁铁旋转角度的绝对位置。
零位位置可通过SPI或I²C指令进行编程设置,无需编程器。由于磁铁零位位置无需机械校正,简化了整个系统组件的组装,帮助开发人员减少开发时间。AS5048可免受磁铁安装位置偏差、气隙变化、温度变化以及外部磁场的干扰的影响。
AS5048稳健性和较宽的运行温度范围(-40°C至150°C)使其成为恶劣工业和医疗环境中旋转角度感测的理想选择。部分AS5048 IC可以菊链连接,进行串行数据读取。
磁铁的绝对位置信息可通过PWM输出直接获得,并可同时通过标准SPI或高速I²C接口读取。AS5048A配有SPI和PWM接口。AS5048B配有I²C接口以及PWM输出。AS5048的内置电压调节器使其可在3.3V 或5V电压下运行。
应用
机器人
工业
医疗
- 外科手术机器人
- 注射泵
- 健身器材
特点
- 360°非接触式角度位置传感器
- 标准SPI或高速I²C接口和PWM
- 通过SPI或I²C指令可设置零点位置
- 无需编程器
- 14位分辨率:0.0219°/ LSB
- 系统线性及平均化后角度精确度达0.05°
- 可进行菊链连接
- 磁场输入范围:30mT-70mT
- 运行温度 -40°C至125°C
- 非接触传感的高可靠性
- 可抗外部杂散磁场干扰
- 兼容3.3V / 5V电压
- 14-pin TSSOP封装
产品框图
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
AS5048
+关注
关注
0文章
3浏览量
7449 -
人形机器人
+关注
关注
2文章
443浏览量
16549 -
磁编码器
+关注
关注
0文章
53浏览量
6171
发布评论请先 登录
相关推荐
小鹏汽车公布人形机器人腿部结构创新专利
信息显示,该专利主要解决了人形机器人在腿部动作时面临的惯量增加问题。传统的人形机器人腿部结构,为了实现关节的弯曲,通常将
泰科机器人获奖,开启人形机器人关节模组新动力
泰科机器人携多款产品及解决方案惊喜亮相2024高工人形机器人年会暨高工金球奖颁奖典礼,并凭借深厚的技术积淀和高效可靠的供应链体系荣膺“高工金球奖——2024年度优秀供应链企业”。本次年

编码器在机器人技术中的应用 编码器在传感器系统中的作用
编码器在机器人技术中扮演着至关重要的角色,特别是在传感器系统中,其作用不可忽视。以下是对编码器在机器人技术中的应用以及其在传感
高精度磁编码器选型指南 磁编码器的安装与调试技巧
的工作环境,包括温度、湿度、振动和电磁干扰等因素。选择能够适应这些环境条件的磁编码器,以确保其长期稳定运行。 输出信号 : 根据控制系统的要求,选择合适的输出信号类型,如模拟信号(如电
磁编码器常见故障及解决方法
磁编码器是一种利用磁场变化来测量角度或位置的传感器,广泛应用于工业自动化、机器人、航空航天等领域。由于其高精度和高可靠性,磁
“0元购”智元灵犀X1机器人,软硬件全套图纸和代码全公开!资料免费下载!
和开发指南分别上线GitHub和智元机器人官网,“一站式”开源软硬件全套图纸和代码,大幅降低了机器人技术开发的门槛,推动了全球机器人技术的普及与创新,让“人形
发表于 10-25 15:20
机器人关节模组为何选择双编码器设计?
关节模组是机器人关节控制系统中的核心组件,决定了机器人的运动控制与动作精准度。在关节模组中,位置反馈和误差校正是确保精确运动的关键,而双

专为人形机器人应用打造,助力具身智能行业发展,泰科机器人关节模组持续升级!
为满足新老客户在定制人形机器人一体化关节时的最新需求,泰科机器人在结构设计、材料选择和定制化开发等方面不断推出创新方案,

MT6701磁编码IC在关节型喷涂机器人领域中的应用
的特点,成为了汽车制造、家电生产、航空航天等领域不可或缺的关键设备。而 MT6701 磁编码IC 作为这一领域内的一项创新技术,其在关节型喷涂机器人中的应用,更是极大地提升了

编码器在机器人系统中的应用
随着科技的飞速发展,机器人技术已广泛应用于工业、医疗、服务等多个领域。在机器人系统中,编码器作为核心的位置和速度检测装置,发挥着至关重要的作用。本文将从编码器的原理、分类及其在
泰科机器人携新款行星滚柱丝杠线性关节模组和双臂协作机器人亮相2024年ITES深圳工业展
作为开年第一大展,ITES深圳工业展于3月28-31日,在深圳宝安国际会展中心成功举办,泰科机器人携人形机器人关节模组新品、智能分拣搬运、双臂协作试剂开拧瓶盖、移液、臂展1米8的大负载






 工商网监
工商网监
评论