 机器视觉控制机械手的具体过程
机器视觉控制机械手的具体过程
机器视觉控制机械手是一种将机器视觉技术与机械手控制技术相结合的自动化技术。它通过机器视觉系统获取目标物体的图像信息,然后利用图像处理技术对图像进行分析和处理,从而实现对机械手的精确控制。以下是机器视觉控制机械手的具体过程的介绍:
- 系统设计
机器视觉控制机械手系统的设计需要考虑以下几个方面:
1.1 系统组成
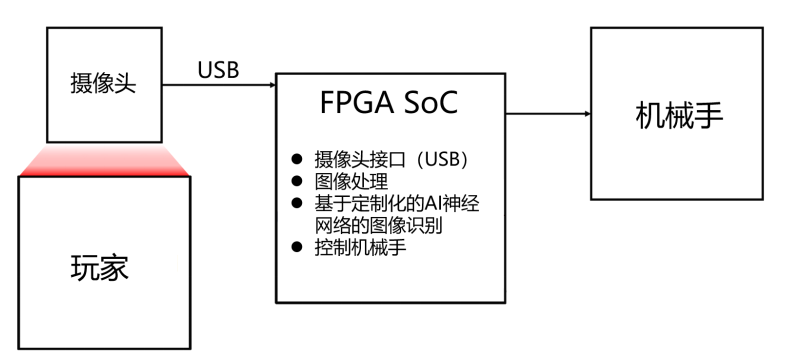
机器视觉控制机械手系统主要由以下几个部分组成:
- 机械手:用于执行各种操作任务的设备,包括手爪、关节、驱动器等。
- 机器视觉系统:用于获取目标物体的图像信息,包括摄像头、镜头、光源等。
- 图像处理系统:用于对获取的图像进行分析和处理,包括图像采集卡、图像处理软件等。
- 控制系统:用于控制机械手的运动和操作,包括控制器、驱动器、传感器等。
1.2 系统布局
根据实际应用场景和需求,设计合理的系统布局。例如,将摄像头安装在机械手的上方或侧面,以便获取目标物体的图像信息。
1.3 系统接口
设计合适的系统接口,以便实现各个组件之间的通信和数据交换。例如,设计合适的通信协议,实现摄像头与图像处理系统之间的数据传输。
- 机器视觉系统
2.1 摄像头选择
根据实际应用场景和需求,选择合适的摄像头。考虑因素包括分辨率、帧率、灵敏度、光谱响应等。
2.2 镜头选择
根据摄像头的参数和实际应用场景,选择合适的镜头。考虑因素包括焦距、光圈、视场角等。
2.3 光源设计
根据目标物体的特性和图像处理的需求,设计合适的光源。考虑因素包括光源类型、光源强度、光源分布等。
- 图像采集
3.1 图像采集卡
选择适合的图像采集卡,实现摄像头与图像处理系统之间的数据传输。
3.2 图像采集参数设置
根据实际应用场景和需求,设置合适的图像采集参数,包括分辨率、帧率、曝光时间等。
- 图像预处理
4.1 噪声去除
对采集到的图像进行噪声去除处理,提高图像质量。
4.2 灰度化
将彩色图像转换为灰度图像,简化后续处理过程。
4.3 二值化
将灰度图像转换为二值图像,便于后续的图像分割和特征提取。
- 图像分割
5.1 阈值分割
根据目标物体与背景的灰度差异,选择合适的阈值进行图像分割。
5.2 边缘检测
5.3 区域生长
利用区域生长算法,从目标物体的种子点开始,逐步扩展到整个目标区域。
- 特征提取
6.1 几何特征
提取目标物体的几何特征,如面积、周长、形状等。
6.2 颜色特征
提取目标物体的颜色特征,如颜色直方图、颜色矩等。
6.3 纹理特征
提取目标物体的纹理特征,如灰度共生矩阵、局部二值模式等。
- 目标识别
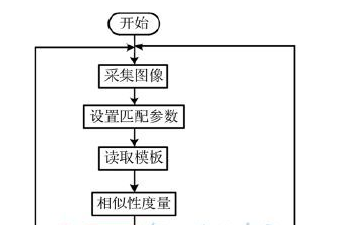
7.1 模板匹配
利用模板匹配算法,将提取到的特征与已知目标物体的特征进行比较,实现目标识别。
7.2 机器学习
利用机器学习算法,如支持向量机、神经网络等,对提取到的特征进行分类和识别。
- 机械手控制
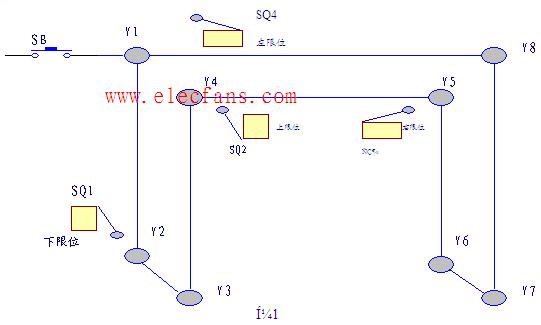
8.1 运动规划
根据目标物体的位置和姿态信息,规划机械手的运动轨迹。
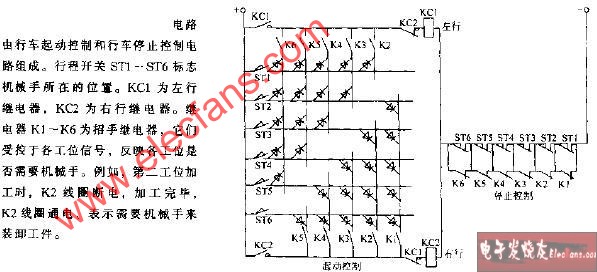
8.2 运动控制
利用控制器和驱动器,实现机械手的精确运动控制。
8.3 手爪控制
根据目标物体的形状和大小,控制手爪的开合程度,实现对目标物体的抓取。
- 系统调试与优化
9.1 参数调整
根据实际应用场景和需求,调整系统参数,如摄像头参数、光源参数、图像处理参数等。
9.2 算法优化
优化图像处理和目标识别算法,提高系统的识别精度和鲁棒性。
9.3 控制策略优化
优化机械手的运动控制策略,提高系统的稳定性和响应速度。
- 应用案例
10.1 工业自动化
机器视觉控制机械手在工业自动化领域有广泛的应用,如装配、搬运、检测等。
10.2 农业自动化
机器视觉控制机械手在农业自动化领域也有应用,如果实采摘、病虫害检测等。
10.3 服务机器人
机器视觉控制机械手在服务机器人领域也有应用,如家庭清洁、医疗护理等。
-
机器视觉
+关注
关注
161文章
4174浏览量
119005 -
机械手
+关注
关注
7文章
323浏览量
29400 -
数据交换
+关注
关注
0文章
92浏览量
17880 -
图像处理系统
+关注
关注
0文章
22浏览量
8276
发布评论请先 登录
相关推荐
基于机器视觉的机械手装配系统方案设计






 工商网监
工商网监
评论