 巡线机器人电路图 巡线机器人的工作原理和应用领域
巡线机器人电路图 巡线机器人的工作原理和应用领域
引言
巡线机器人,作为一种先进的智能巡检设备,近年来在多个领域得到了广泛应用。它以移动机器人为载体,搭载多种检测仪器,通过机器视觉、电磁场、GPS、GIS等多场信息融合技术,实现自主移动、自主巡检与数据分析。本文将详细阐述巡线机器人的定义、工作原理及其在多个领域的应用,以及还将分享一些巡线机器人电路图,以期为读者提供一个全面而深入的了解。
一、巡线机器人的定义
巡线机器人,顾名思义,是一种专门用于沿着特定线路(如电力线路、铁路轨道、管道走廊等)进行巡检的机器人。它以移动机器人作为载体,通过搭载可见光摄像机、红外热成像仪、激光雷达等多种传感器和检测仪器,实现对目标线路及其周围环境的全面监控与检测。巡线机器人不仅具备自主移动与导航能力,还能进行障碍物检测识别、自主作业规划、自主越障等复杂操作,是工业自动化、智能巡检领域的重要创新成果。
二、巡线机器人的工作原理
1. 导航与定位
巡线机器人的核心在于其自主导航与定位能力。这主要依赖于机器视觉、电磁场检测、GPS定位以及GIS地理信息系统等多种技术的综合应用。在巡检过程中,机器人首先通过视觉传感器捕捉线路标志或周围环境特征,利用图像处理技术识别并定位自身位置。同时,结合GPS信号和GIS地图信息,机器人能够实时更新自身位置,确保沿着预定线路准确行进。
2. 障碍物检测与识别
为了保障巡检任务的顺利进行,巡线机器人还具备强大的障碍物检测与识别能力。这主要通过激光雷达、超声波传感器等测距设备实现。在行进过程中,机器人会不断扫描周围环境,检测并识别出可能存在的障碍物(如树木、建筑物、其他设施等)。一旦发现障碍物,机器人会立即启动避障算法,规划出安全的绕行路径,确保巡检任务不受影响。
3. 自主作业规划与执行
巡线机器人不仅具备自主导航和避障能力,还能根据巡检任务的具体要求,自主规划作业流程并执行相应操作。这包括设定巡检路线、调整检测参数、启动检测仪器等。通过嵌入式计算机作为控制系统的软硬件开发平台,机器人能够实时处理传感器数据,分析巡检结果,并根据分析结果调整后续巡检策略。
4. 数据采集与传输
巡线机器人在巡检过程中会收集大量图像、视频、温度、湿度等数据信息。这些数据通过机器人内部的存储系统进行自动存储,并通过无线通信技术实时传输至远程监控中心。监控中心的工作人员可以通过电脑或移动设备远程查看巡检画面和数据报告,及时了解线路运行状态和潜在问题。
5. 自主越障与适应性调整
面对复杂多变的巡检环境,巡线机器人还具备自主越障和适应性调整的能力。通过机械臂、履带或轮腿等结构设计,机器人能够轻松跨越沟壑、楼梯、障碍物等复杂地形。同时,机器人还具备自动调节高度、角度和速度等参数的能力,以适应不同的巡检场景和需求。
三、巡线机器人的应用领域
1. 电力行业
在电力行业,巡线机器人被广泛应用于电力线路的巡检和维护工作。它们能够沿着高压线路、变电站等区域进行自主巡检,检测线路故障、设备老化、温度异常等问题。通过红外热成像仪等检测设备,机器人还能及时发现并预警潜在的火灾隐患和过热现象。此外,巡线机器人还能在恶劣天气条件下进行巡检工作,大大提高了电力巡检的效率和安全性。
2. 铁路和交通运输业
在铁路和交通运输领域,巡线机器人同样发挥着重要作用。它们可以在铁路轨道上自主巡检信号灯、轨道、道岔等设施的运行状态,及时发现并解决故障和安全隐患。通过机器视觉技术,机器人还能对轨道进行高精度测量和定位,为铁路维护提供精确的数据支持。此外,在交通运输枢纽内,巡线机器人还能协助进行车辆调度和安全管理等工作。
3. 石油和天然气行业
在石油和天然气行业,巡线机器人被用于巡检管道、储罐和井场等设施。它们能够沿着管道走廊自主行进,检测管道泄漏、腐蚀、破损等问题。通过搭载的气体检测传感器和红外热成像仪等设备,机器人还能实时监测管道周围的环境参数和潜在危险源。这有助于及时发现并处理安全隐患,保障石油和天然气行业的安全生产。
4. 制造业
在制造业领域,巡线机器人被应用于生产线上的设备巡检和产品质量检测。它们能够沿着生产线自主行进,检测设备的运行状态和性能参数。通过机器视觉技术,机器人还能对产品进行外观检测和尺寸测量等工作。这有助于及时发现并解决设备故障和产品质量问题,提高生产效率和产品质量。
5. 建筑业
在建筑业中,巡线机器人扮演着重要角色,特别是在大型建筑项目如桥梁、隧道、高楼等的施工和维护阶段。这些机器人能够进入人类难以到达或危险的区域进行巡检,如检查钢结构焊缝的完整性、混凝土结构的强度以及防水层的完好性等。通过高精度传感器和数据分析,它们能及时发现潜在的结构问题,为工程师提供关键数据支持,确保建筑的安全性和耐久性。
此外,巡线机器人还能在建筑物内部进行巡检,如检查电梯井、管道井、电缆井等区域的设备状况。这些机器人通常具备灵活的运动能力,能够轻松穿越狭窄空间,并进行详细的视觉和物理检查,减少了对人工巡检的依赖,提高了巡检效率和安全性。
6. 物流业
在物流行业中,巡线机器人被应用于仓库管理和货物追踪。它们可以在仓库内部自主导航,对货物进行盘点、分类和定位。通过扫描条形码或RFID标签,机器人能够快速准确地识别货物信息,并将其上传至物流管理系统。这不仅提高了仓库管理的自动化水平,还减少了人为错误,提高了物流效率。
此外,巡线机器人还能在运输过程中进行货物监控,确保货物在运输过程中的安全和完整。它们可以安装在运输车辆上,实时检测车辆的行驶状态、货物温度、湿度等环境参数,并在异常情况下及时发出警报,通知相关人员进行处理。
7. 农业
在农业领域,巡线机器人被用于农田的巡检和作物生长监测。它们可以沿着预设的路线在田间地头自主行驶,利用高清摄像头和光谱传感器等设备对作物进行拍摄和分析。通过分析作物的生长状态、叶片颜色、病虫害情况等数据,机器人能够为农民提供精准的农事建议,如灌溉、施肥、病虫害防治等。
此外,巡线机器人还能在农业大棚内进行巡检,监测温室内的温度、湿度、光照等环境参数,确保作物在最佳的生长环境下生长。这有助于提高农作物的产量和品质,减少资源浪费,促进农业可持续发展。
8. 公共安全
在公共安全领域,巡线机器人发挥着不可替代的作用。它们可以被部署在重要场所如机场、火车站、地铁站等进行巡逻和监控。通过搭载高清摄像头、红外热成像仪等设备,机器人能够实时捕捉现场画面并传输至监控中心,为安全人员提供实时信息支持。
在灾难救援现场,巡线机器人能够进入危险区域进行侦查和搜救工作。它们能够穿越废墟、隧道等复杂地形,利用传感器探测生命迹象和有害物质浓度等信息,为救援人员提供宝贵的信息支持。此外,机器人还能携带必要的救援物资和设备进入灾区,为被困人员提供紧急援助。
巡线机器人在多个领域展现出了广泛的应用前景和巨大的价值。它们通过自主导航、障碍物检测、数据采集与传输等先进技术实现了对目标线路的全面监控与检测,提高了巡检效率和安全性。随着技术的不断进步和应用场景的不断拓展,巡线机器人将在更多领域发挥重要作用,为社会的智能化和可持续发展贡献力量。未来,我们可以期待巡线机器人在技术性能、智能化水平以及与其他系统的集成能力方面取得更大的突破和创新。
四、巡线机器人电路图
1、使用L293D的巡线机器人电路图(1)
这里给出了简单的循线机器人电路,它是使用L293D IC 构建的,它是一个四路高电流半 H 桥驱动器。其设计目的是提供双向导出电流。
通过使用该电路,您可以构建巡线机器人,而无需任何微控制器或任何程序代码。
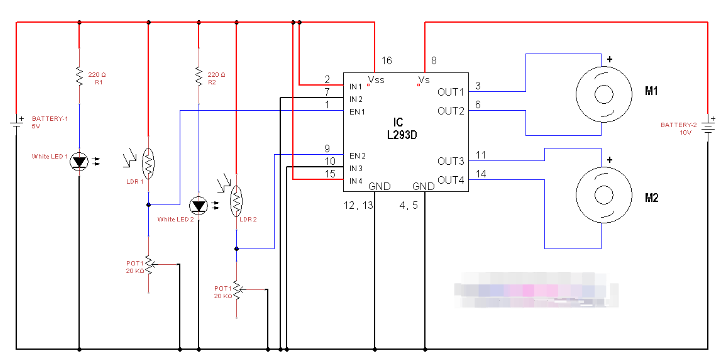
两个电机连接为 M1 和 M2,这两个电机将充当左侧和右侧电机,这些电机的旋转由 ICL293D 使能输入 1 和 2 控制,当光强度落在上时,这些电机直接与两个LDR(光电管)连接LDR变化意味着电机(M1,M2)方向会改变,因此机器人不断沿着线轨迹移动,使用黑色线作为轨迹。
2、使用L293D的巡线机器人电路图(2)
如今,巡线机器人非常常见。基本上,这些机器人遵循或运行在特定的黑色线路轨道上。在工业层面,这些机器人有很多实际应用。例如,他们可以轻松执行物料搬运过程。此外,该机器人可以成为一种令人印象深刻的车辆,可以将货物从一个地方运输到另一个地方,从而节省时间。我们可以用不同的方式制造这种机器人。它可以通过使用微控制器和 IR 来构建。然而,并不是每个人都理解并执行编程。既然如此,我们就来制作这个机器人,无需编程。因此,在本教程中,我们将“使用 L293D 的巡线机器人”

对于这个项目,首先,您需要绘制黑线轨道。现在,在使用 L293D 的机器人的这条生产线上,我们连接了两个名为 M1 和 M2 的电机。因此,这两个电机分别作为左侧电机和右侧电机工作。 L293D IC 控制这些电机的旋转。 IC 的使能引脚(引脚 1 和 9)与 LDR 连接。我们都知道LDR的工作原理。当没有光照射到其上时,电流就会流过电路。换句话说,你可以说LDR电路在黑暗中工作。因此,该机器人可以轻松地跟随黑光(黑暗)。因此,当落在 LDR 上的光线发生变化时,有线电机就会改变方向。结果,机器人连续地沿着线轨道行驶。
3、使用L293D的巡线机器人电路图(3)
巡线机器人(通常称为 LFR)基本上是一种智能设备,可以检测线路并遵循地板上的路径。该路径通常可以是地板上可见的黑线,也可以是具有高对比度颜色的白色地板。 LFR 的基本原理是基于光在表面上的入射。
巡线机器人是最常见的,通常也是学生在学术中制作的第一个基于机器人的项目。巡线机器人的基本工作原理是沿着白色表面上的黑线移动。这意味着黑线作为机器人的轨迹。在这篇文章中,我们使用 IC L293D 来驱动两个电机。

该机器人的基本原理是沿着黑色胶带制成的轨道行驶。机器人在驱动器IC L293D驱动的电机的帮助下向前、向左、向右移动。 LDR1和LDR2分别放置在机器人的左侧和右侧。白色表面反射最大的光,而黑色表面吸收最大的光。因此,当两个 LDR 检测到白色表面时,机器人会向前移动,因为 LDR 将允许 EN1 和 EN2 引脚上的电压通过(高强度光下的低电阻),从而使电机驱动器驱动两个电机。当左侧 LDR (LDR1) 检测到一条黑线时,其上的光强度非常小。
因此,其电阻变高,使 EN1 处的电压为零,从而使左侧电机停止,因此当只有右侧电机运行时,它会自动将机器人转向左侧。当 LDR2 检测到黑线导致机器人向右转向使其沿着黑线行驶时,此过程将相同。
4、使用8051微控制器的巡线机器人电路图
巡线机器人在机器人爱好者和建造者中非常熟悉,因为几乎每个人都是从这个简单的项目开始他们的旅程的。不要以它们的简单性来判断,这些机器人在工业、机械等领域被证明非常有用。本文将指导您使用 8051 系列 Atmel AT89S52 微控制器构建您的第一个巡线机器人。

该 LFR 使用两个简单的红外传感器(包括一个红外 LED 和一个光电二极管)来检测铺设在表面上的轨道。由于黑色是红外光束的良好反射器,因此它会将光束反射回二极管,然后二极管对其进行感应。请注意,此 LFR 逻辑仅适用于铺设在白色表面上的黑色轨道。
该机器人根据固定在底盘两侧的红外传感器发送到处理轨道性质的控制器的反馈信号进行工作。当该红外传感器检测到黑色时,其输出处于逻辑低 (L) 状态,反之亦然。 所以在正常情况下(白色地板)传感器输出很高。当这两个传感器感应到白色表面时,即没有反射时,机器人就会直线行驶。但是,当左传感器检测到白色且右传感器检测到黑色轨道时,机器人右转;当左传感器检测到黑色轨道且右传感器检测到白色时,机器人左转。
-
微控制器
+关注
关注
48文章
7536浏览量
151293 -
电路图
+关注
关注
10339文章
10720浏览量
530019 -
机器人
+关注
关注
211文章
28366浏览量
206888 -
巡线机器人
+关注
关注
0文章
14浏览量
6430
发布评论请先 登录
相关推荐
经典巡线机器人电源系统研究
怎样设计一个能避开各种障碍物的巡线机器人吗

设计一个巡线机器人的竞赛试题免费下载
如何使用树莓派制作一个巡线机器人






 工商网监
工商网监
评论