 带Arduino的旋转编码器设计 旋转编码器的工作原理和特点
带Arduino的旋转编码器设计 旋转编码器的工作原理和特点

一、旋转编码器概述
旋转编码器(Rotary Encoder),也称为轴编码器,是一种将旋转的机械位移量转换为电气信号的传感器。这些电气信号经过处理后,可以用于检测位置、速度等参数。旋转编码器广泛应用于工业控制、机器人技术、精密测量、自动化设备以及计算机输入设备等领域。作为一种集光机电技术于一体的速度位移传感器,旋转编码器具有高精度、高分辨率、长寿命和稳定可靠等优点。
二、旋转编码器的工作原理
旋转编码器的工作原理主要基于光电转换或磁电转换技术。以光电式旋转编码器为例,其工作原理简述如下:
- 光电转换过程 :
- 信号处理 :
- 接收到的初始电信号经过后续电路的处理,如放大、整形等,最终输出为脉冲信号或代码信号。这些信号可以直接被控制系统读取和处理。
- 方向判断与计数 :
- 对于增量式旋转编码器,通常会有A、B两相输出信号,且两相信号之间存在90度的相位差。通过检测A、B两相信号的相位关系,可以判断旋转编码器的旋转方向。
- 同时,通过计数A相或B相信号的脉冲数量,可以计算出旋转编码器的旋转角度或位移量。
- 零位脉冲 :
- 部分旋转编码器还会提供一个Z相信号作为零位脉冲。每当旋转编码器旋转一圈时,Z相信号会输出一个脉冲,用于校准或作为参考零位。 # 三、旋转编码器的特点
旋转编码器作为一种高精度、高可靠性的传感器,具有以下显著特点:
- 高精度与高分辨率 :
- 旋转编码器能够精确地将旋转的机械位移量转换为电气信号,具有较高的测量精度和分辨率。例如,光学式增量型编码器可以有较高的单圈脉冲数,如2500到10000个脉冲,从而实现对旋转角度或位移量的精细测量。
- 长寿命与稳定性 :
- 旋转编码器采用无触点的光电或磁电转换技术,避免了传统机械接触式传感器因磨损而导致的性能下降问题。因此,旋转编码器具有较长的使用寿命和稳定的性能表现。
- 多功能性 :
- 旋转编码器不仅可以测量旋转角度或位移量,还可以根据输出信号的频率计算出旋转速度。此外,通过配合其他传感器或控制系统,还可以实现更复杂的功能和自动化控制。
- 适应性强 :
- 旋转编码器具有多种类型和规格可供选择,如增量式、绝对值式、单路输出、双路输出等。这些不同类型的旋转编码器可以适应不同的应用场景和测量需求。
- 易于安装与维护 :
- 旋转编码器体积小、重量轻、结构紧凑,易于安装在各种机械设备上。同时,由于其无触点的设计特点,使得旋转编码器的维护成本相对较低。
- 抗干扰能力强 :
- 旋转编码器采用光电或磁电转换技术,信号传输过程中不易受到外界电磁干扰的影响。因此,旋转编码器在恶劣的工业环境中也能保持稳定的性能表现。
四、旋转编码器的应用领域
旋转编码器因其高精度、高分辨率和稳定可靠的性能特点,在多个领域得到了广泛应用:
- 工业自动化 :
- 机器人技术 :
- 在机器人技术中,旋转编码器被广泛应用于关节角度的测量和控制。通过精确测量机器人关节的旋转角度和速度,可以实现对机器人姿态和运动轨迹的精确控制。
- 精密测量 :
- 在精密测量领域,如光学仪器、精密机床等场合中,旋转编码器常被用于测量微小的旋转角度或位移量。其高精度和高分辨率的特点使得测量结果更加准确可靠。
- 计算机输入设备 :
- 在计算机输入设备中,如鼠标和轨迹球等装置中,也常采用旋转编码器来检测用户的旋转操作。通过测量旋转编码器的旋转角度和速度等参数,可以实现对光标位置的精确控制。
五、旋转编码器的分类
旋转编码器根据其工作原理和输出信号的特点,可以大致分为以下几类:
- 增量式旋转编码器 :
- 增量式旋转编码器是最常见的一种类型。它输出的是与旋转角度增量成正比的脉冲信号。通过检测A、B两相的脉冲数量和相位差,可以确定旋转的方向和角度。增量式编码器结构简单,成本较低,但每次上电或复位后,需要借助外部设备或算法来确定起始位置。
- 绝对值式旋转编码器 :
- 绝对值式旋转编码器在旋转过程中,每个角度位置都对应一个唯一的编码值。即使断电或重启,也能直接读取当前的角度位置,无需重新校准。这种编码器通常使用二进制、格雷码或BCD码等方式进行编码,具有较高的抗干扰能力和可靠性。
- 混合式旋转编码器 :
- 单圈与多圈旋转编码器 :
- 单圈旋转编码器只能测量一圈内的旋转角度或位移量。而多圈旋转编码器则能够记录并输出多圈旋转的累积值,适用于需要大范围旋转测量的场合。
六、旋转编码器的选型与应用注意事项
- 精度与分辨率 :
- 根据应用需求选择合适的精度和分辨率。精度要求高的场合应选择高分辨率的编码器。
- 输出信号类型 :
- 根据控制系统或处理电路的兼容性,选择合适的输出信号类型(如TTL、HTL、RS-422等)。
- 工作环境 :
- 考虑工作环境中的温度、湿度、振动、电磁干扰等因素,选择适合该环境的编码器。
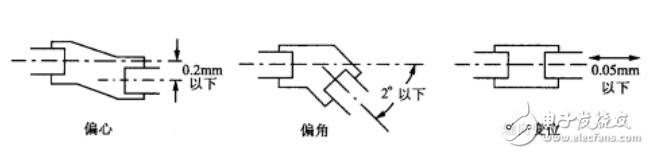
- 安装方式 :
- 根据机械设备的结构和空间限制,选择合适的安装方式(如轴向安装、径向安装等)。
- 防护等级 :
- 根据应用场合的防尘、防水需求,选择具有相应防护等级的编码器。
- 成本考虑 :
- 在满足性能要求的前提下,综合考虑编码器的成本,选择性价比高的产品。
七、旋转编码器的发展趋势
随着工业自动化、智能制造和物联网技术的快速发展,旋转编码器作为重要的传感器元件,也在不断地发展和创新。未来,旋转编码器的发展趋势可能包括以下几个方面:
- 更高精度与更高分辨率 :
- 随着精密制造技术的进步,旋转编码器的精度和分辨率将得到进一步提升,以满足更高精度的测量需求。
- 智能化与网络化 :
- 将智能芯片和网络通信技术融入旋转编码器,实现数据的远程传输、实时监测和智能分析,提高系统的自动化水平和智能化程度。
- 小型化与集成化 :
- 随着电子元器件的小型化和集成化趋势,旋转编码器也将朝着更小的体积和更高的集成度方向发展,以适应更紧凑的机械设备空间。
- 多功能化与定制化 :
- 根据不同应用场合的特定需求,开发具有多种功能和定制化特性的旋转编码器,以满足用户的个性化需求。
- 环保与可持续发展 :
- 注重旋转编码器的环保性能和可持续发展能力,采用环保材料和节能设计,降低产品的生命周期成本和环境影响。
总之,旋转编码器作为工业自动化和精密测量领域中的重要传感器元件,其性能和应用范围将随着技术的不断进步而不断拓展。未来,旋转编码器将在更多领域发挥重要作用,为智能制造和物联网技术的发展提供有力支持。
八、带 Arduino 的旋转编码器设计
1、带 Arduino 的旋转编码器设计(一)
旋转编码器可用于计数操作,它将旋转角度转换为计数数字信号,可以无限制地旋转360°并给出脉冲输出。本文将提供基本的 Arduino 旋转编码器接口细节以及传统旋转编码器的操作。
旋转编码器
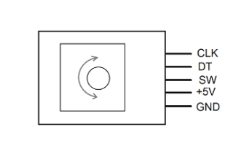
该旋转编码器分线板有五个引脚,
- GND → 接地电源
- → +5V 电源
- SW → 按钮开关
- DT → 编码器引脚 B
- CLK → 编码器引脚 A
当轴顺时针旋转时,编码器引脚 A 处生成与编码器引脚 B 90° 异相的输出脉冲。
顺便说一句,当轴逆时针旋转时,编码器输出引脚 A 和 B 处生成的输出会反转。

旋转编码器Arduino接口

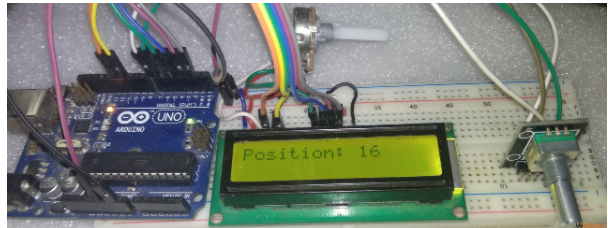
将旋转编码器的电源引脚连接到Arduino板,+连接到5V,Gnd连接到Gnd。然后将 CLK(编码器输出 A)引脚连接到 Arduino 数字引脚 D2,将 DT(编码器输出 B)引脚连接到数字引脚 D1。完成连接后,上传以下草图以获取串行监视器中旋转编码器的角度和位置。
旋转编码器的 Arduino 代码
#define encoderOutA 2 // CLK pin of Rotary Enocoder
#define encoderOutB 1 // DT pin of Rotary Enocoder
int counter = 0;
int presentState;
int previousState;
void setup() {
pinMode (encoderOutA,INPUT);
pinMode (encoderOutB,INPUT);
Serial.begin (9600);
previousState = digitalRead(encoderOutA); // Get current state of the encoderOutA
}
void loop() {
presentState = digitalRead(encoderOutA);
if (presentState != previousState)
{
if (digitalRead(encoderOutB) != presentState)
{
counter ++;
}
else {
counter --;
}
Serial.print("Position: ");
Serial.println(counter);
}
previousState = presentState; // Replace previous state of the encoderOutA with the current state
}
在Arduino代码中,首先定义输出引脚并将计数初始化为0,然后声明当前和先前的状态变量。通过使用“IF”条件循环,获取旋转编码器的当前状态并与之前的状态进行比较。如果没有变化,则计数保持不变,否则,顺时针旋转时计数值增加,逆时针旋转时计数值减少。
2、带 Arduino 的旋转编码器设计(二)
介绍
为了确定旋转轴的角位置,使用了称为旋转编码器的传感器。因此,传感器根据旋转产生电信号。该传感器在包装、纺织、印刷、机器人等不同行业有着广泛的应用。因此,在本文中,我们将连接“旋转编码器与 Arduino UNO”。旋转编码器是电位计的现代化数字等效物,但它们的适应性更强。
概述
硬件概述
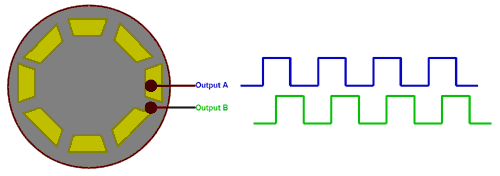
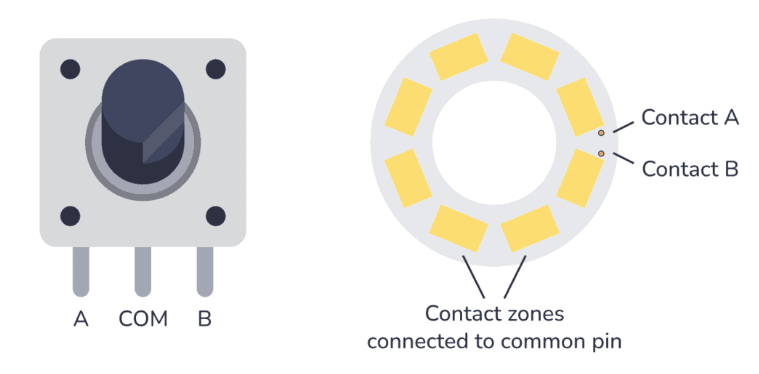
该模块包括一个圆盘,该圆盘具有连接到公共引脚 C 的等距接触区域,以及另外两个接触引脚 A 和 B。
这个特殊的模块位于一个带有五个引脚的分线板上,我们将在本次 Arduino 演示中使用它。第一个是输出 A 引脚,第二个是输出 B 引脚,第三个是 Button 引脚,最后两个引脚是 VCC 和 GND 引脚。
工作准则
当圆盘开始逐步旋转时,引脚A和B将与公共引脚接触,从而产生两个方波输出信号。如果我们只计算信号的脉冲,我们就可以使用两个输出中的任何一个来确定旋转位置。然而,如果我们希望确定旋转方向,则必须同时分析两个信号。
两个输出信号始终彼此相差 90 度。如果编码器顺时针旋转,输出 A 将领先于输出 B。
旋转编码器和电位器的区别
旋转电位器和编码器之间最明显的区别是,编码器可以沿任一方向连续旋转,而电位器只能顺时针或逆时针旋转一定的量,然后必须停止。
因此,当您需要知道旋钮的确切位置时,电位器是最佳选择。另一方面,旋转编码器适用于您只需要知道位置变化而不是确切位置的情况。
电路原理图

Arduino代码
// Rotary Encoder Inputs
#define CLK 2
#define DT 3
#define SW 4
int counter = 0;
int currentStateCLK;
int lastStateCLK;
String currentDir ="";
unsigned long lastButtonPress = 0;
void setup() {
// Set encoder pins as inputs
pinMode(CLK,INPUT);
pinMode(DT,INPUT);
pinMode(SW, INPUT_PULLUP);
// Setup Serial Monitor
Serial.begin(9600);
// Read the initial state of CLK
lastStateCLK = digitalRead(CLK);
}
void loop() {
// Read the current state of CLK
currentStateCLK = digitalRead(CLK);
// If last and current state of CLK are different, then pulse occurred
// React to only 1 state change to avoid double count
if (currentStateCLK != lastStateCLK && currentStateCLK == 1){
// If the DT state is different than the CLK state then
// the encoder is rotating CCW so decrement
if (digitalRead(DT) != currentStateCLK) {
counter --;
currentDir ="CCW";
} else {
// Encoder is rotating CW so increment
counter ++;
currentDir ="CW";
}
Serial.print("Direction: ");
Serial.print(currentDir);
Serial.print(" | Counter: ");
Serial.println(counter);
}
// Remember last CLK state
lastStateCLK = currentStateCLK;
// Read the button state
int btnState = digitalRead(SW);
//If we detect LOW signal, button is pressed
if (btnState == LOW) {
//if 50ms have passed since last LOW pulse, it means that the
//button has been pressed, released and pressed again
if (millis() - lastButtonPress > 50) {
Serial.println("Button pressed!");
}
// Remember last button press event
lastButtonPress = millis();
}
// Put in a slight delay to help debounce the reading
delay(1);
}
工作说明
要了解Arduino UNO的旋转编码器,请根据电路图连接电路或按照连接表进行连接。然后在Arduino IDE中编写上面给出的代码,并将其上传到ARDUINO UNO中。 Arduino 处理代码并控制编码器的输出。因此,您将根据您的代码观察旋转编码器的旋转。
代码说明
- 首先,定义编码器的引脚,连接到Arduino的不同引脚。例如,CLK引脚连接到Arduino的引脚2,DT连接到引脚3,SW连接到引脚4。然后定义将在代码中使用的不同变量。变量计数器代表旋转电位器旋钮时的计数。变量currentStateCLK和lastStateCLK用于保持 CLK 输出的状态。 currentDir 变量已定义为稍后用于在监视器上打印方向。并且,lastButtonPress被定义为消除开关抖动。
- 在 void 设置中,我们已将编码器的引脚声明为输入。此外,为了从 CLK 引脚读取值,我们提供了digitalRead (CLK ) 函数,并将该读数存储在变量lastStateCLK中。
- 在 void 循环中,为了从 CLK 引脚读取当前状态,我们再次提供函数 digitalRead (CLK), 并将其存储在currentStateCLK中。然后我们给出if语句,将lastStateCLK与 currentStateCLK进行比较,以确定旋转的状态方向。如果不同,则说明旋钮为逆时针方向。然后我们将电流设置为 CWW。如果相等,则说明旋钮为顺时针方向。然后我们将 currentDir 设置为 CW。之后,我们用当前状态更新lastStateCLK。然后我们读取开关按钮状态并给出 if 函数。并且,根据该函数,如果按钮保持低电平超过 50 毫秒,则会打印Button Pressed在串行监视器上。 ## 应用及用途
- 在传送带中控制速度和方向。
- 它可用于在各种电子项目中将大量输入压缩为少量输出。
- 挤压机、压力机、焊机和不同的自动化金属成型机械。
-
传感器
+关注
关注
2578文章
55756浏览量
795039 -
旋转编码器
+关注
关注
5文章
162浏览量
27567 -
Arduino
+关注
关注
191文章
6533浏览量
197611
发布评论请先 登录
Arduino开发板的旋转编码器如何使用
什么是旋转编码器 旋转编码器的工作原理


旋转编码器能直接换吗_旋转编码器更换注意事项

旋转编码器的工作原理,旋转编码器的作用功能及应用



评论