 集聚5种操作系统,米尔瑞米派168元带回家
集聚5种操作系统,米尔瑞米派168元带回家
米尔电子发布的瑞萨第一款MPU生态板卡-瑞米派(Remi Pi),采用瑞萨RZ/G2L双核A55芯片,接口丰富,全面兼容树莓派的扩展模块。瑞米派支持五种系统,兼顾学习开发和项目产品需要。软件提供五种软件系统分别为:基于Yocto构建的两种系统,一种是支持通用功能的精简型系统,另一种是带有Qt和丰富Linux命令集的全面型系统;还有Ubuntu系统、Debian系统和ROS 2系统。

以下为5种系统的具体介绍:
系统 | 概述 |
| myir-image-Core | 精简型系统,支持通用功能,EtherCAT运行库以及LVGL软件 |
| myir-image-Full | 全面型系统,包含丰富的Linux命令集,Qt 5.15.0运行库,Python 3.8.14组件及Measy HMI 2.0软件 |
| myir-image-Ubuntu | Ubuntu 22.04系统,支持通用功能,LXDE界面 |
| myir-image-Debian | Debian 12.5系统,支持通用功能,XFCE界面。 |
| myir-image-ROS | 基于Ubuntu 22.04的ROS 2 |
myir-image-Core:
基于Yocto构建带有LVGL界面的镜像,包含完整的硬件驱动,常用的系统工具,调试工具等。支持使用Shell, C/C++进行应用开发。
EtherCAT运行库支持实时以太网通信协议,适合需要快速和可靠的数据交换的应用。
LVGL是一个开源图形库,用于创建嵌入式用户界面,支持低资源消耗和高度定制化。轻量级,适用于多种工业场景、医疗设备等。
该系统的发布旨在为用户提供一个精简,小巧,便捷的操作系统,方便用户集成自己工具
瑞米派Core系统LVGL界面展示
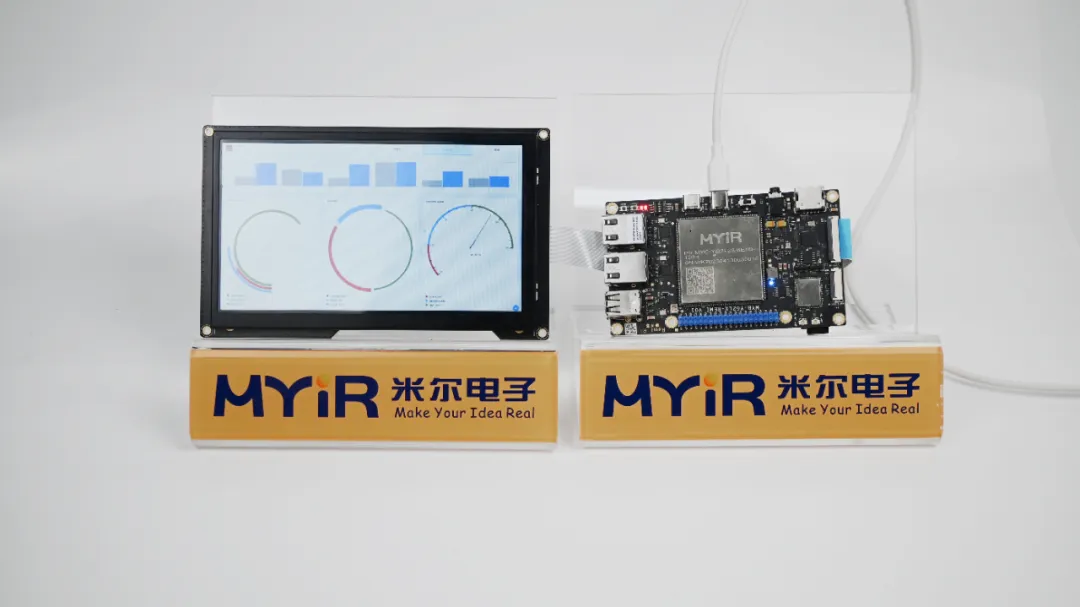
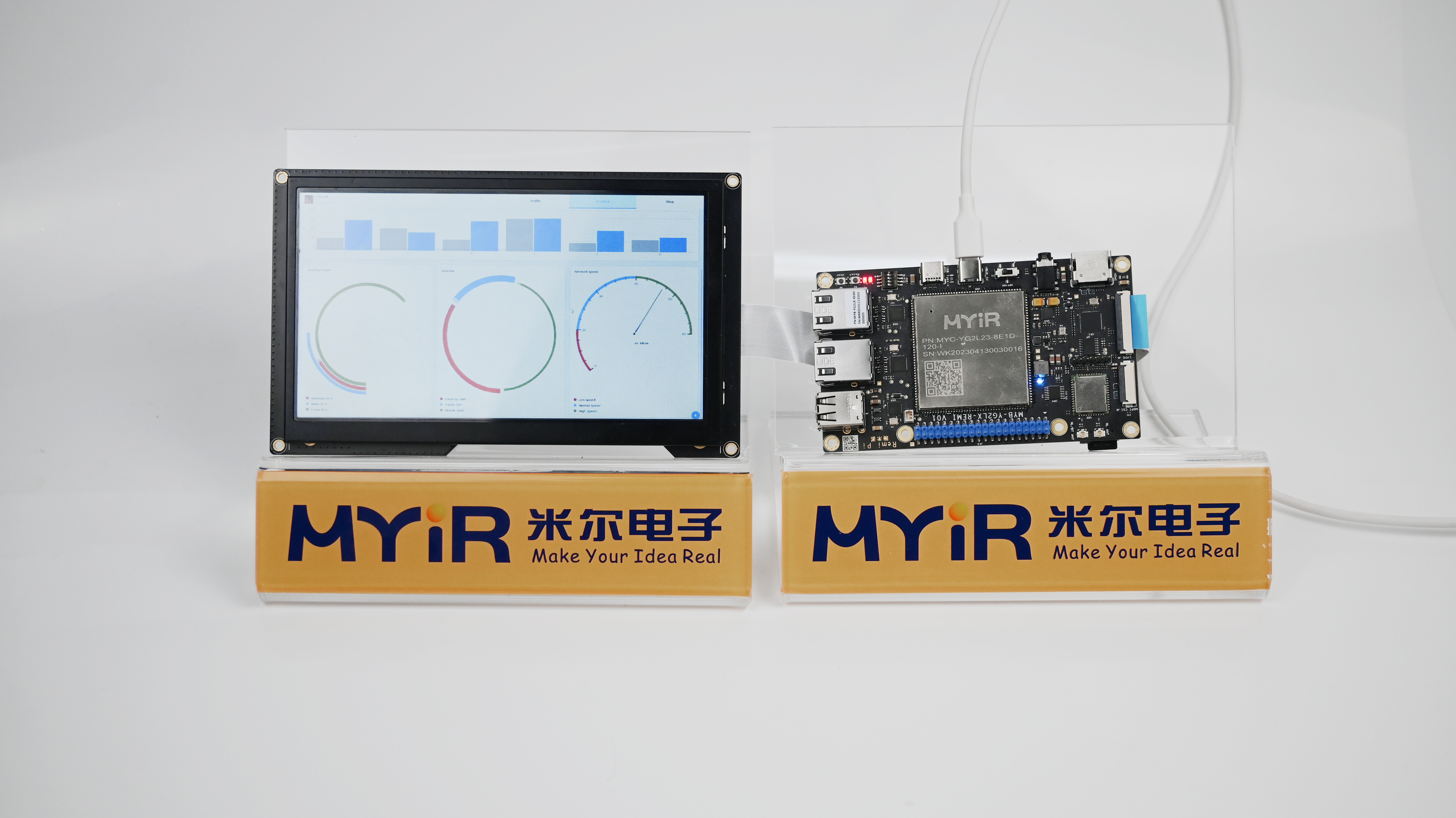
myir-image-Full:
基于Yocto构建的带有GUI界面的镜像,包含Core中所有的完整的硬件驱动,常用的系统工具,调试工具等,包含Qt运行时库和基于Qt开发的HMI界面。支持使用 Shell, C/C++, QML, Python进行应用开发。其包含丰富的Linux命令集,可满足用户进行高级系统管理和定制,Qt和Python的支持使得开发复杂的图形用户界面和应用程序变得更加容易,而Measy HMI 2.0软件则为用户提供了现代化的人机界面设计和控制能力。为用户提供一个功能全面,稳定的系统进行开发。
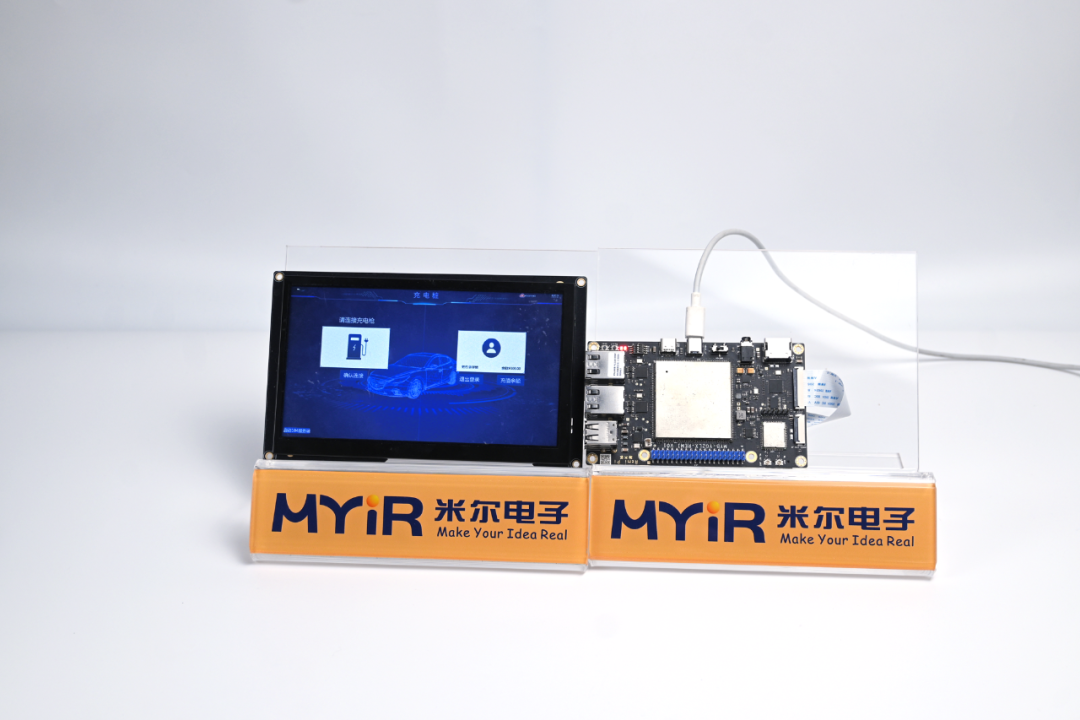
瑞米派Full系统Qt HMI界面展示
myir-image-Ubuntu:
瑞米派上的Ubuntu系统是一款功能强大的操作系统,为用户提供了稳定、安全和灵活的计算体验。作为一个开源系统,在瑞米派平台上,集成Ubuntu系统带来了许多优势。提供的工具和应用程序满足各种需求,其强大的LXDE桌面系统供了许多实用的功能,它具备快速启动和关闭应用程序的能力,提供了易于定制的面板和菜单,使用户能够根据自己的喜好进行个性化设置。此外,它还支持多任务处理、文件管理和网络连接等常用功能,方便用户进行快速开发。
米尔提供的基于Ubuntu 22.04 core架构制作而成的带LXDE的系统myir-image-Ubuntu ,包涵通用的命令工具和网站的硬件驱动,适合需要轻量级桌面环境的用户。

瑞米派Ubuntu系统 LXDE桌面展示
myir-image-Debian:
瑞米派发布了一款精简、专业而丰富的操作系统——Debian。作为一种广受欢迎的Linux发行版,Debian凭借其稳定性和安全性,成为众多用户的首选。瑞米派的Debian系统提供了一个强大而灵活的基础,让您可以根据自己的需求进行定制。瑞米派的Debian系统中已经配置了各种功能外设,比如网络,USB,WiFi,音视频等,用户可直接进行使用。此外,瑞米派的Debian操作系统还带轻量级的XFCE桌面环境,为用户提供高效、稳定和易用的桌面体验。无论您是一位技术专家,还是刚入门的新手,瑞米派都将成为您的最佳伴侣。它的稳定性、安全性和灵活性将为您带来无限的可能性。

瑞米派Debian系统XFCE桌面展示
myir-image-ROS:
在瑞米派上我们推出了ROS 2系统,提供了强大的工具和库,使开发人员能够快速构建灵活、可靠且高效的机器人系统。ROS 2在瑞米派平台上的应用提供了许多关键功能和优势。首先,ROS 2采用了一种分布式架构,支持多个节点以及节点间的通信。这使得不同的模块可以并行运行,实现更高的性能和可扩展性。此外,该系统在瑞米派中还引入了更强大的通信和控制机制,包括可靠的发布/订阅模型和服务模型,海龟仿真等,您可以轻松体验瑞米派ROS 2系统给你带来的开发体验。

瑞米派ROS 2系统节点通信展示
系统 | 功能项 | 文件名 |
Ubuntu | Ubuntu 22.04 base | Ubuntu-base-22.04-base-arm64.tar.gz |
启动管理 | Xinit | |
网络管理 | network-manager network-manager-gnome | |
音频管理 | Xine | |
视频播放器 | Xine | |
Debian | Debian 22.04 base | Debian-base-22.04-base-arm64.tar.gz |
启动管理 | Xinit | |
网络管理 | network-manager network-manager-gnome | |
音频管理 | Xine | |
视频播放器 | Xine | |
ROS | Ubuntu 22.04 base | Ubuntu-base-22.04-base-arm64.tar.gz |
启动管理 | Xinit | |
网络管理 | network-manager |
表1 Ubuntu、Debian、ROS资源列表
类别 | 名称 | 描述 |
源码 | Flash-Writer | Flash-Writer 1.06 |
TF-A | Arm Trusted Firmware 2.6 | |
Bootloader | U-boot 2021.10 | |
Kernel | Linux Kernel 5.10.83 | |
Yocto | Yocto 3.1.20 | |
文件系统 | myir-image-Core | Yocto构建的文件系统 |
myir-image-Full | Yocto构建的文件系统 | |
myir-image-Ubuntu | Ubuntu 22.04 core构建的文件系统 | |
myir-image-Debian | Debian构建的文件系统 | |
myir-image-ROS | Ubuntu 22.04 core构建的文件系统 | |
工具 | 开发工具 | sdk.tar.bz2、e2 studio |
烧录工具 | Win32DiskImager、teraterm | |
文档 | Remi Pi_Linux BSP与系统移植指南 | 包含Linux BSP与系统移植 |
Remi Pi_Linux软件评估指南 | 介绍使用Yocto项目安装运行Linux系统以及嵌入式 Linux驱动和应用程序的开发流程 | |
Remi Pi_Linux软件开发指南 | 包含源码编译,烧录等 | |
Remi Pi FreeRTOS应用开发笔记 | 包含环境搭建,工程创建等 | |
Remi Pi实时系统与EtherCAT移植应用笔记 | 包含RTlinux、EtherCAT移植 | |
Remi Pi_Ubuntu系列移植指南 | 包含Ubuntu移植 | |
Remi Pi_Debian系列移植指南 | 包含Debian移植 | |
Remi Pi_ROS系列移植指南 | 包含ROS移植 |
表2 软件资料
关于Remi Pi的五个系统,用户购买后可以获取更详细的相关资料。
-
操作系统
+关注
关注
37文章
6927浏览量
124018 -
板卡
+关注
关注
3文章
118浏览量
16931 -
MPU
+关注
关注
0文章
377浏览量
49075 -
米尔电子
+关注
关注
0文章
114浏览量
538
发布评论请先 登录
相关推荐
【米尔-瑞米派 Remi Pi 创意秀】 01 - 开发环境搭建
领万元大奖!米尔电子Remi Pi 瑞米派创意秀

领万元大奖!米尔电子Remi Pi 瑞米派创意秀
领万元大奖!米尔电子Remi Pi 瑞米派创意秀

端午好礼丨米尔喊你抽奖啦!NXP i.MX开发板、吸尘器、定制背包等你带回家
2024瑞萨技术交流日进行中,米尔诚邀您参观
瑞米派Ubuntu系统移植指南-米尔RemiPi
【米尔-瑞米派兼容树莓派扩展模块-试用体验】值得拥有的米尔-瑞米派兼容树莓派生态板
【米尔-瑞米派兼容树莓派扩展模块-试用体验】测试安装VNC远程桌面
【米尔-瑞米派兼容树莓派扩展模块-试用体验】米尔瑞米派Remi Pi系统与Ethercat移植
【米尔-瑞米派兼容树莓派扩展模块-试用体验】用视频来了解这块生态板_米尔-瑞米派兼容树莓派扩展模块
【米尔-瑞米派兼容树莓派扩展模块-试用体验】初始开发板_米尔-瑞米派兼容树莓派扩展模块
【米尔-瑞米派兼容树莓派扩展模块-试用体验】基于ROS系统的三麦轮小车自主导航
米尔更新面向工业产品的软件系统-基于瑞米派(Remi Pi)





 工商网监
工商网监
评论