 机器人神经网络系统的特点包括
机器人神经网络系统的特点包括
机器人神经网络系统是一种模拟人类大脑神经网络的计算模型,具有高度的复杂性和灵活性。在本文中,我们将详细介绍机器人神经网络系统的特点,包括其结构、功能、优势和应用等方面。
一、引言
神经网络是一种受人脑启发的计算模型,具有高度的并行性和自适应性。机器人神经网络系统是将神经网络技术应用于机器人领域的研究和应用,具有以下特点:
- 高度的复杂性:神经网络系统由大量的神经元和连接组成,具有高度的复杂性。
- 高度的灵活性:神经网络系统可以根据输入数据自动调整自身的结构和参数,具有高度的灵活性。
- 高度的自适应性:神经网络系统可以根据环境变化自动调整自身的行为和策略,具有高度的自适应性。
- 高度的鲁棒性:神经网络系统具有容错能力,即使部分神经元或连接失效,也能保持正常工作。
- 高度的泛化能力:神经网络系统可以通过学习少量的样本数据,对未知数据进行预测和分类。
二、神经网络的基本结构
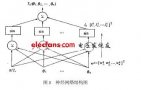
神经网络系统由输入层、隐藏层和输出层组成,每个层由多个神经元组成。神经元之间通过权重连接,权重决定了神经元之间的相互作用。
- 输入层:输入层接收外部信号或数据,将数据传递给隐藏层。
- 隐藏层:隐藏层对输入数据进行处理和转换,提取特征和模式。
- 输出层:输出层将隐藏层的处理结果转换为最终的输出结果。
三、神经网络的激活函数
激活函数是神经网络中神经元的非线性函数,用于引入非线性特性,提高神经网络的表达能力。
- Sigmoid函数:Sigmoid函数是一种常见的激活函数,其输出范围在0到1之间,具有平滑的曲线。
- Tanh函数:Tanh函数是Sigmoid函数的变体,输出范围在-1到1之间,具有更好的数值稳定性。
- ReLU函数:ReLU函数是一种简单的激活函数,当输入大于0时输出输入值,当输入小于0时输出0,具有计算速度快的优点。
- Softmax函数:Softmax函数常用于多分类问题,将输入向量转换为概率分布。
四、神经网络的训练方法
神经网络的训练是通过调整权重和偏置参数,使网络的输出尽可能接近目标值。
- 反向传播算法:反向传播算法是一种常用的训练方法,通过计算损失函数的梯度,更新权重和偏置参数。
- 梯度下降法:梯度下降法是一种优化算法,通过迭代更新权重和偏置参数,使损失函数最小化。
- 动量法:动量法是一种改进的梯度下降法,通过引入动量项,加速收敛速度,避免陷入局部最小值。
- Adam优化器:Adam优化器是一种自适应学习率的优化算法,根据梯度的一阶和二阶矩估计,自动调整学习率。
五、神经网络的正则化方法
正则化是防止神经网络过拟合的一种技术,通过在损失函数中添加正则项,限制模型的复杂度。
- L1正则化:L1正则化通过在损失函数中添加权重的绝对值之和,促使权重稀疏化,提高模型的泛化能力。
- L2正则化:L2正则化通过在损失函数中添加权重的平方和,限制权重的大小,防止模型过拟合。
- Dropout:Dropout是一种随机丢弃神经元的技术,通过减少神经元之间的相互依赖,提高模型的泛化能力。
- Early Stopping:Early Stopping是一种在训练过程中提前终止的技术,通过监控验证集的损失,避免过拟合。
六、神经网络的优化技巧
优化技巧是提高神经网络性能和效率的方法,包括参数初始化、批量归一化、学习率调整等。
- 参数初始化:合理的参数初始化可以加速神经网络的收敛速度,常见的初始化方法有Xavier初始化和He初始化。
- 批量归一化:批量归一化是一种对输入数据进行归一化处理的技术,可以加速收敛速度,提高模型的泛化能力。
- 学习率调整:学习率调整是通过在训练过程中动态调整学习率,使模型在不同阶段具有不同的收敛速度。
- 多任务学习:多任务学习是一种同时训练多个任务的技术,通过共享网络的表示层,提高模型的泛化能力。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28597浏览量
207831 -
神经网络
+关注
关注
42文章
4777浏览量
100995 -
神经元
+关注
关注
1文章
363浏览量
18486 -
计算模型
+关注
关注
0文章
29浏览量
9868
发布评论请先 登录
相关推荐
一种基于模糊神经网络的机器人控制技术
传统的机器人控制技术大多是基于模型的控制方法,无法得到满意的轨迹跟踪效果,模糊控制和神经网络等人工智能的发展为解决机器人轨迹跟踪问题提供了新的思路。本文采用高斯函数作为模糊隶属函数,将模糊控制
发表于 09-19 14:34
•1946次阅读

基于深度学习技术的智能机器人
“狗”。深度学习主要应用在数据分析上,其核心技术包括:神经网络搭建、神经网络训练及调用。CNN神经网络训练 机器视觉中的图像预处理属于传统技
发表于 05-31 09:36
神经网络在机器人运动控制中的应用
运动控制 是人工神经网络应用于机器人控制的重要内容。本文就人工神经网络用于机器人运动学正解问题进行研究, 通过建立机器人运动学
发表于 06-28 11:04
•38次下载
基于模糊神经网络的机器人位置控制系统设计
本文将模糊控制与神经网络相结合,设计一种基于模糊神经网络的机器人位置控制系统,并将其运用到机器人轨迹跟踪控制
发表于 09-18 11:43
•1966次阅读
基于模糊神经网络的机器人位置控制系统设计详解
本文将模糊控制与神经网络相结合,设计一种基于模糊神经网络的机器人位置控制系统,并将其运用到机器人轨迹跟踪控制
发表于 09-19 10:53
•32次下载
基于BP神经网络的机器人感觉运动系统
生物的诸多技能是在生物个体的生长发育过程中逐渐形成和发展起来的,能否赋予机器人这样一种特性呢?为此,本文基于BP神经网络为机器人建立起一种类似生物的感觉运动系统,使
发表于 01-09 16:46
•1次下载

人工智能神经网络系统的特点
人工智能神经网络系统是一种模拟人脑神经网络结构和功能的计算模型,具有高度的自适应性、学习能力和泛化能力。本文将介绍人工智能神经网络系统的特点,包括





 工商网监
工商网监
评论