 高压放大器在镓基液态金属微型马达驱动实验研究中的应用
高压放大器在镓基液态金属微型马达驱动实验研究中的应用
实验名称:高压放大器在镓基液态金属微型马达驱动实验研究中的应用
研究方向:新型材料
测试目的:
微/纳马达虽然是一种以实际应用为基础的动力装置,但其在科学研究方面的价值也尤为重要。在微/纳米尺度下,它可以接受能量注入,进行能量转化和机械功输出,并实现特定的力学功能。它的研究汇集了电子、机械、材料科学以及物理、化学和生物中新生长出的(包括交叉的、不同层次的)微小和微观领域的科学技术综合体,对于研究微纳尺度下粒子的运动特性有着重要的意义,反过来也对物理、化学和材料科学的发展有着一定的推动作用。
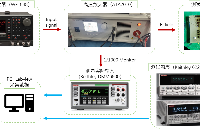
测试设备:ATA-2082高压放大器、芯片、印制电路板、安卓手机、电脑、小铜微珠等。
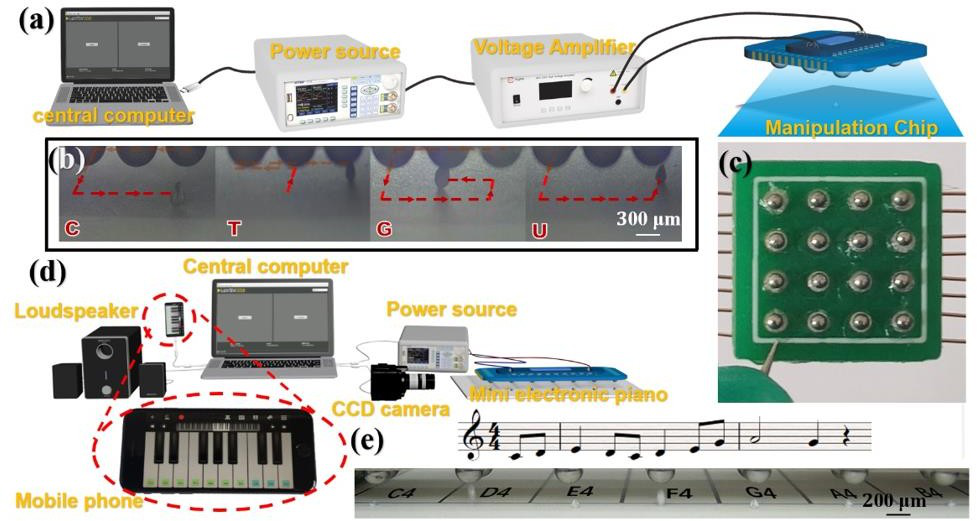
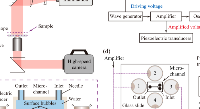
图4-5(a)控制平台示意图。(b)由编程电场引导的镓基液态金属微型马达的三维运动轨迹。(c)由~800mm微珠组成4×4阵列操作芯片的摄影图像。(d)“迷你钢琴”示意图。(e)播放音乐时,操控镓基液态金属微型马达跳跃的照片图像。
实验过程:
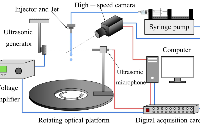
设计一个控制平台,通过控制平台来实现对镓基液态金属微型马达点对点的精准操控。马达控制平台系统由输入指令的互动媒体端、可以产生模拟信号的电源端、放大信号的电压放大器端以及接收放大信号的操控芯片组成。如图4-5(a)所示。输入指令的互动媒体端主要是由预先装好指令程序的计算机组成的。在指令程序中预先设定好指令信号串,指令信号串通过转换电源转换成模拟信号,模拟信号通过电压放大器放大信号脉冲,放大后的信号脉冲传输到接收放大信号的操控芯片上。马达就会按着预先设计好的指令信号串实现沿着固定轨道的三维跳跃运动。操作芯片是由预先设计好电路结构的印制电路板(PCB)和直径为800mm的小铜微珠微焊接而成。PCB电路板尺寸为5cm×5cm,板内设计出4×4个微型槽,每个槽的直径为200mm。通过微焊接技术将小铜珠焊接在4×4个微型槽中。这样操控芯片就设计完成如图4-5(c)。微型马达操控平台是由直径为800mm的小铜微珠排列成4×4矩阵操控芯片与纸基板组成。操控芯片到纸基板之间的距离为2mm。通过独立切换4×4矩阵中每个微铜球施加信号脉冲来实现微型马达的不同微球之间的三维跳跃运动,进而实现微型马达的精确可控运动。我们通过这个操控系统实现了马达在纸基板的沿着固定轨迹(“C”“T”“G”“U”四个字母轨迹)的三维精确跳跃任务。
操作过程如下:首先给操控芯片上的4×4矩阵微铜球沿时间前后顺序依次输入“C”“T”“G”“U”轨迹的脉冲信号,时间间隔为1S,马达便随着不同时间间隔微电极提供的局部电场来指引其完成沿规定水平方向的三维跳动。值得注意的是,相邻的微珠之间的距离至少要大于微珠的半径,以防止当强信号进入时他们之间产生电弧(火花)。通过分别在电极阵列上事先设定的电压轨迹,镓基液态金属微型马达可以沿着规定的轨迹跳动,同时也可以根据需要启动/停止。如图4-5(b)。显然,在这个控制系统中,操作的精度很大程度上依赖于整列单元的大小。通过减小微珠直径和微珠间距可以达到10微米级别的高精度。然而,当进一步减小单元尺寸时,微电极产生的电场也会相应地减小,这极大影响了镓基液态金属的跳变性能。因此,在每一种情况下,自己评估操作精度和操作性能之间的平衡是非常必要的。
在此基础上,我们设计制作了一架“迷你电子钢琴”如图4-5d所示。“迷你电子钢琴”系统包括一款安装了钢琴应用程序的安卓手机、中央电脑、电压源以及控制平台几部分。安装了钢琴应用程序的安卓手机被用来输入演奏音乐音符极作为输入命令端口。连接到手机端口的中央电脑被用来作为接收这些信号的端口,并通过它将输入音乐音符信号转换成电信号,电信号通过电压源转换为信号脉冲,最终传输到控制平台上。控制平台系统由操控芯片和可触摸压力感应基地系统两部分结构组成。操控芯片由预先设计好电路结构的印制电路板(PCB)和直径为800mm的小铜微珠组成。PCB电路板尺寸为2.5cm×7cm,板内设计出2×7个微型槽,每个槽的直径为200mm。通过微焊接技术将小铜珠焊接在2×7个微型槽中。通过微焊接的每个小铜珠就与PCB电路板上的电路完成并联,电路板与电压源相接。可触摸压力感应基地系统是由两部分组成,一部分(前端)为纸基地,一部分(后端)为可触控压力感应膜如图4-4所示。可触控压力感应膜与信号转换器连接,目的是将压力信号转换为电信号,信号转换器另一端与可以接受电信号并且将不同电信号转换为不同音乐音符的音乐音响设备连接。这样可触摸压力感应基地系统就设计完成。操控芯片与压力感应基底系统之间的距离为2mm。镓基液态金属的三维运动被CCD摄像机记录下来。操作芯片由2×7的微电极阵列组成,沿X轴分为7个部分,用“C5”到“B5”的音符编码(图4-5e)。
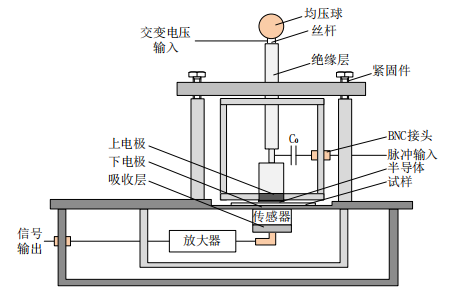
图4-4:可触摸压力感应基地
实验结果:
当我们在手机钢琴系统中按下一个琴键,例如“C4”,该输入指令就会通过手机传输到中央电脑中,中央电脑程序将该键位的信号转换为电信号,传输到电压源中转换为脉冲信号,脉冲信号传输到操控芯片上“C4”位置上方的前端的微电极上,这时微电极产生的局部电场指导其进行原地三维运动。当跳动到2S时,操控芯片上的延时电路使脉冲信号传输到后一个微电极上,导致前一个微电极局部电场消失,后一个微电极上产生局部电场从而将马达拉到后端微电极与可触摸压力感应基底之间跳动。可触摸压力感应基底通过感应马达跳动过程中对其底部产生的压力来向信号转化器传输压力信号,信号转换器将压力信号转换为电信号传输给能将电信号转换为音乐音符的音响设备。音响设备就会发出我们输入设备输入的那个音符。就仿佛像是在我们操控镓基金属微型马达在弹奏钢琴。
安泰ATA-2082高压放大器:
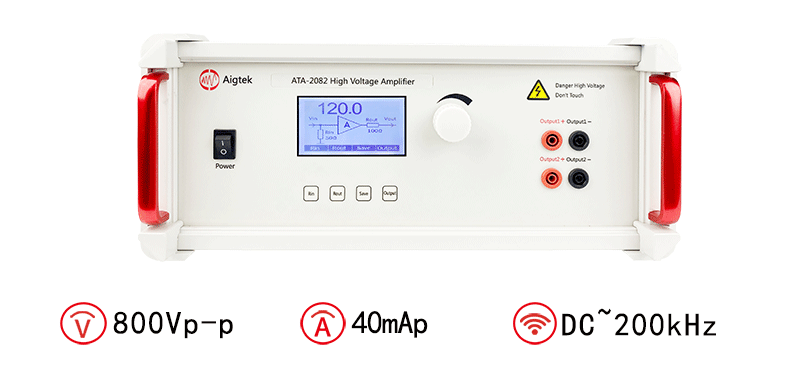
图:ATA-2082高压放大器指标参数
本文实验素材由西安安泰电子整理发布。Aigtek已经成为在业界拥有广泛产品线,且具有相当规模的仪器设备供应商,样机都支持免费试用。西安安泰电子是专业从事功率放大器、高压放大器、功率信号源、前置微小信号放大器、高精度电压源、高精度电流源等电子测量仪器研发、生产和销售的高科技企业。公司致力于功率放大器、功率信号源、计量校准源等产品为核心的相关行业测试解决方案的研究,为用户提供具有竞争力的测试方案,Aigtek已经成为在业界拥有广泛产品线,且具有相当规模的仪器设备供应商,样机都支持免费试用。
本文实验案例参考自知网论文《微型镓基液态金属马达构筑及电_磁场驱动研究》
-
高压放大器
+关注
关注
4文章
523浏览量
14446 -
马达驱动
+关注
关注
2文章
115浏览量
20153 -
微型马达
+关注
关注
0文章
3浏览量
597
发布评论请先 登录
相关推荐
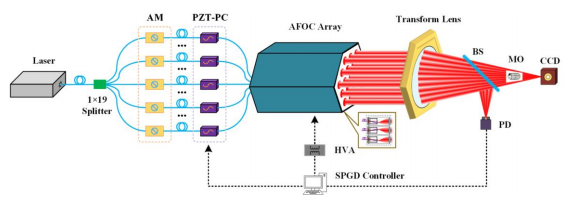
高压放大器在光纤激光相控阵室内相干合成实验研究中的应用
Aigtek高压放大器在交变电场研究中的应用










 工商网监
工商网监
评论