 CAN数据帧的各个域及其作用
CAN数据帧的各个域及其作用
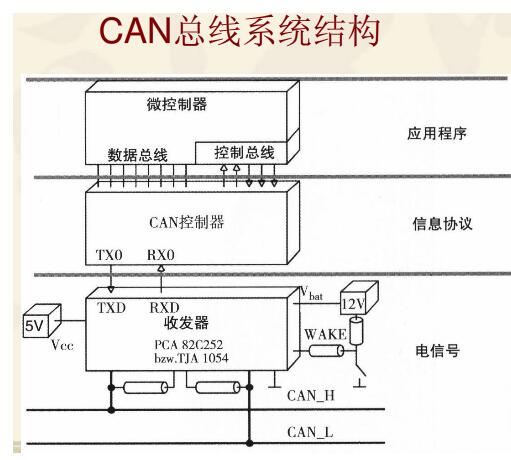
CAN(Controller Area Network)是一种用于汽车电子系统中的通信协议,它具有高可靠性、实时性和灵活性等特点。在CAN通信中,数据帧是最基本的通信单元,用于传输信息。
- 概述
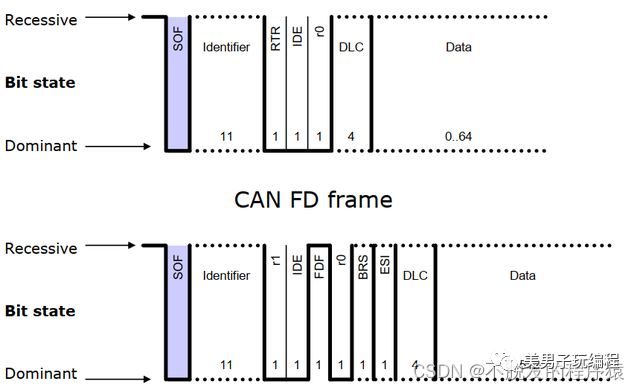
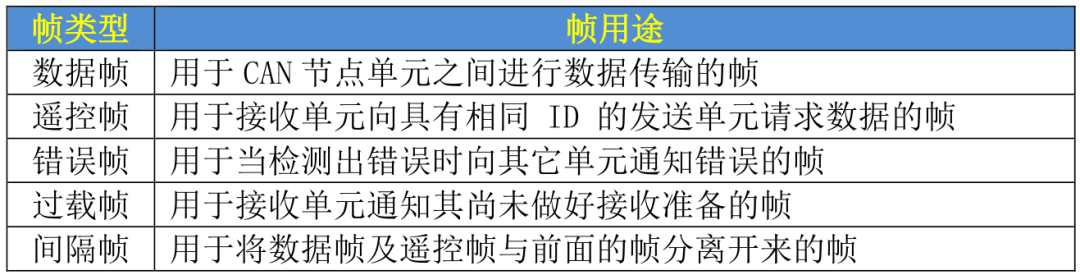
CAN数据帧由多个域组成,包括帧起始、仲裁域、控制域、数据域和帧结束。每个域都有其特定的作用,共同构成了一个完整的数据帧。下面将详细介绍这些域的作用。
- 帧起始
帧起始是CAN数据帧的第一个域,用于标识一个新帧的开始。帧起始由一个特殊的位模式组成,即“01111000”,这个位模式在CAN总线上具有最高的优先级,可以确保数据帧的开始被正确识别。
帧起始的作用是:
- 标识新帧的开始
- 同步发送和接收节点的通信时钟
- 确保数据帧的开始被正确识别
- 仲裁域
仲裁域是CAN数据帧的第二个域,用于确定数据帧的优先级。仲裁域由11位标识符组成,其中11位标识符的前29位用于标识数据帧的ID,最后2位用于标识远程发送请求(RTR)。
仲裁域的作用是:
- 确定数据帧的优先级
- 标识数据帧的ID
- 标识远程发送请求
- 控制域
控制域是CAN数据帧的第三个域,用于描述数据帧的类型和长度。控制域由6位组成,其中1位用于标识数据帧的类型(远程帧或数据帧),1位用于标识数据帧的扩展标志(0表示标准帧,1表示扩展帧),4位用于标识数据域的长度。
控制域的作用是:
- 描述数据帧的类型和长度
- 标识数据帧是远程帧还是数据帧
- 标识数据帧是标准帧还是扩展帧
- 数据域
数据域是CAN数据帧的核心域,用于传输实际的数据信息。数据域的长度由控制域的4位长度字段确定,标准帧的数据域长度为0-8字节,扩展帧的数据域长度为0-64字节。
数据域的作用是:
- 传输实际的数据信息
- 根据控制域的长度字段确定数据域的长度
- 帧结束
帧结束是CAN数据帧的最后一个域,用于标识数据帧的结束。帧结束由7个连续的“1”位组成,这个特殊的位模式在CAN总线上具有最高的优先级,可以确保数据帧的结束被正确识别。
帧结束的作用是:
- 标识数据帧的结束
- 确保数据帧的结束被正确识别
- 错误检测和处理
在CAN通信中,错误检测和处理是非常重要的。CAN协议采用了多种错误检测机制,包括位填充、帧检验、CRC检验和应答检验等。当检测到错误时,CAN节点会发送错误标志,通知其他节点存在错误,并进行相应的错误处理。
错误检测和处理的作用是:
- 保证数据传输的可靠性
- 及时发现和处理错误
- 维护CAN总线的稳定性
- 应用层协议
在实际应用中,CAN数据帧通常需要承载特定的应用层协议,以实现特定的功能。应用层协议定义了数据域中数据的格式和含义,使得不同的CAN节点能够正确解析和处理数据。
应用层协议的作用是:
- 定义数据域中数据的格式和含义
- 实现特定的功能
- 保证不同CAN节点之间的兼容性
- 网络管理
在CAN网络中,网络管理是非常重要的。网络管理包括节点地址分配、路由选择、流量控制等,以确保CAN网络的高效运行。
网络管理的作用是:
- 保证CAN网络的高效运行
- 实现节点地址分配和路由选择
- 控制网络流量,防止拥塞
- 安全性
在某些应用场景中,CAN通信的安全性是非常重要的。为了保证CAN通信的安全性,可以采用加密、认证等技术,防止数据被篡改或泄露。
安全性的作用是:
- 保护数据不被篡改或泄露
- 增强CAN通信的可靠性
- 防止恶意攻击
- 总结
本文详细介绍了CAN数据帧的各个域及其作用,特别是信息的实质内容。CAN数据帧由帧起始、仲裁域、控制域、数据域和帧结束等多个域组成,每个域都有其特定的作用。
-
通信协议
+关注
关注
28文章
874浏览量
40294 -
汽车电子
+关注
关注
3026文章
7925浏览量
166854 -
CAN
+关注
关注
57文章
2742浏览量
463581 -
数据帧
+关注
关注
0文章
45浏览量
6737
发布评论请先 登录
相关推荐
CAN总线过载帧及数据帧详解





 工商网监
工商网监
评论