 can信息帧数据链路层组成部分及功能
can信息帧数据链路层组成部分及功能
- CAN协议概述
1.1 CAN协议的起源和发展
CAN协议最早由德国Bosch公司于1983年提出,旨在解决汽车电子系统中的通信问题。随着技术的发展,CAN协议逐渐被广泛应用于工业控制、医疗设备、智能家居等领域。
1.2 CAN协议的特点
CAN协议具有以下特点:
- 多主控制:CAN协议支持多个节点同时进行通信,提高了系统的实时性和可靠性。
- 广播通信:CAN协议采用广播方式进行通信,所有节点都可以接收到发送的数据。
- 非破坏性仲裁:当两个或多个节点同时发送数据时,CAN协议通过仲裁机制确保数据的正确传输。
- 错误检测和处理:CAN协议具有错误检测和处理功能,可以及时发现并处理通信过程中的错误。
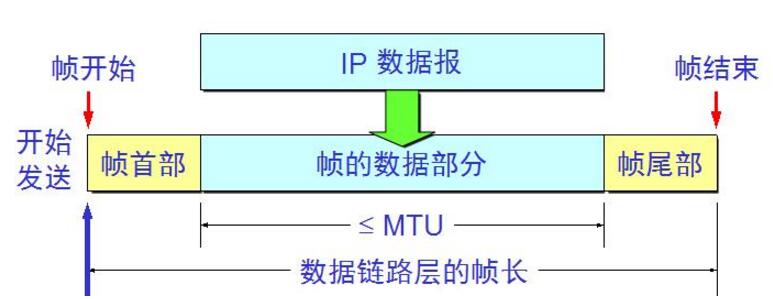
- CAN信息帧的组成部分
CAN信息帧是CAN协议中最基本的数据传输单元,其组成部分如下:
2.1 帧起始位
帧起始位是信息帧的第一个位,用于标识信息帧的开始。
2.2 仲裁场
仲裁场用于确定发送数据的优先级。在CAN协议中,仲裁场的长度为11位或29位,分别对应标准帧和扩展帧。仲裁场的值越小,优先级越高。
2.3 控制场
控制场包括远程传输请求位(RTR)和标识符扩展位(IDE)。RTR位用于标识数据帧是远程帧还是数据帧,IDE位用于标识帧是标准帧还是扩展帧。
2.4 数据场
数据场用于存储实际传输的数据。标准帧的数据场长度为0-8字节,扩展帧的数据场长度为0-64字节。
2.5 校验场
校验场包括循环冗余校验(CRC)和CRC界定符。CRC用于检测数据在传输过程中是否出现错误,CRC界定符用于标识CRC校验的结束。
2.6 应答场
应答场包括应答插槽和应答界定符。应答插槽用于接收节点发送应答,应答界定符用于标识应答场的结束。
2.7 帧结束位
帧结束位是信息帧的最后一个位,用于标识信息帧的结束。
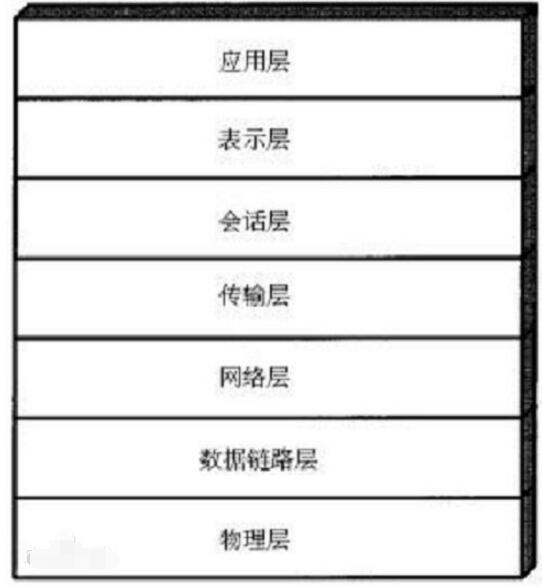
- 数据链路层的功能
数据链路层是OSI参考模型中的第二层,主要负责在物理层之上实现数据的可靠传输。数据链路层的功能包括:
3.1 帧同步
帧同步是数据链路层的基本功能之一,用于确保发送和接收节点能够正确识别信息帧的开始和结束。
3.2 差错控制
差错控制是数据链路层的另一个重要功能,包括错误检测和错误纠正。CAN协议采用循环冗余校验(CRC)进行错误检测,以确保数据的完整性。
3.3 流量控制
流量控制用于防止发送节点过快地发送数据,导致接收节点无法处理。数据链路层通过控制数据的发送速率,确保数据的可靠传输。
3.4 访问控制
访问控制是数据链路层的另一个关键功能,用于协调多个节点之间的通信。在CAN协议中,通过非破坏性仲裁机制实现访问控制,确保数据的正确传输。
- CAN信息帧在数据链路层的应用
4.1 帧同步
在CAN信息帧中,帧起始位和帧结束位用于实现帧同步。发送节点通过发送帧起始位标识信息帧的开始,接收节点通过检测帧起始位实现帧同步。
4.2 差错控制
在CAN信息帧中,校验场的CRC用于实现差错控制。发送节点在发送数据前,会根据数据生成CRC校验码,并将其附加到数据场之后。接收节点在接收到数据后,会重新计算CRC校验码,并与接收到的CRC校验码进行比较,以检测数据是否出现错误。
4.3 流量控制
在CAN协议中,流量控制主要通过仲裁机制实现。当两个或多个节点同时发送数据时,CAN协议通过仲裁机制确定优先级,确保数据的可靠传输。
4.4 访问控制
在CAN协议中,访问控制主要通过非破坏性仲裁机制实现。当两个或多个节点同时发送数据时,CAN协议通过比较仲裁场的值,确定发送数据的优先级。具有较高优先级的节点可以继续发送数据,而具有较低优先级的节点则需要等待,直到高优先级节点完成数据发送。
-
数据
+关注
关注
8文章
6926浏览量
88867 -
CAN
+关注
关注
57文章
2725浏览量
463465 -
工业控制
+关注
关注
37文章
1447浏览量
85798 -
数据链
+关注
关注
2文章
39浏览量
15780
发布评论请先 登录
相关推荐
介绍车用CAN通讯的基础知识,数据链路层部分

数据链路层的作用
什么是OSI模型数据链路层
数据链路层到底是什么_数据链路层工作原理是怎样的
数据链路层常用成纸法有哪些_数据链路层的作用





 工商网监
工商网监
评论