 脏污识别,扫地机器人的又一块拼图
脏污识别,扫地机器人的又一块拼图
重新定义清洁方式。
“四肢”发达,“头脑”简单
在过去几年,扫地机器人进入了快速迭代期,从清洁系统,到外观,再到基站,都和最初的产品有了天壤之别,然而时至今日,大刀阔斧式的创新越来越少,扫地机器人下一个拼图又该是什么?
一直以来,厂商们在销售过程中无不强调扫地机器人“人”的属性,但用户真正感受到的却是“机器”的属性,所谓的智能化更多是个噱头。再看过去的升级也大多围绕在“机器”的属性上,而“人”的属性却进展寥寥。不过随着大模型的兴起,智能决策、人机交互逐渐被重视起来,机器人的智能化拼图正在完善。但在这之中,仍有一个问题被人们所忽视。
除了需要提升清洁系统,还需要改变机器人的作业逻辑。
简单来说,现在的扫地机器人只有机器的“蛮力”,却没有人的“灵巧”。作业中,只会按部就班的“一条道走到黑”,导致最终的清洁效果并不稳定,甚至会反向清扫。无法像人一样,知道哪里脏,有多脏,是什么样的脏污,从而做出相应的清扫方式。
在真实场景中,地面的脏污程度和脏污类型都不同,包括零食残渣、饮料液体、厨余污渍等等。而一旦遇到这些脏污,如液体类,大多会被边刷扫的到处溅射,引发更多的清洁问题。另外,在遇到重污区域时,也会出现清洁不干净的情况,若采用多遍清扫,又会导致重复清扫,耗能增加,整体清洁效率低,体验感下降等。
如果让机器人具备和人相似的主动脏污识别能力,无疑是让机器人具备“人”的属性的重要途径。
通过主动脏污识别,意味着机器人能够根据地面的实际情况实时调整清洁策略,做到有的放矢,在脏的地方反复清洁,不脏的地方不做无效清洁,有效减少人工干预,提升机器人的清洁效率和质量,其意义不言而喻。
事实上,市面上已经有厂商将脏污识别技术集成到产品中,如云鲸J4、云鲸逍遥001,且取得了不错的表现。与此同时,这条赛道的玩家不只有云鲸等厂商,INDEMIND在脏污识别技术研发和应用上同样走在了行业前列。
作为一家以视觉技术为核心的AI技术公司,INDEMIND在视觉感知技术的探索上,有着天然的敏感性,在早期着手研发机器人解决方案之初,便意识到机器人在清洁逻辑上的局限性,过于呆板化的机械式清洁,会降低机器人的清洁表现。
因此,如何让机器人能够自主探污、识污,根据污渍的种类和分布情况,自主决策清洁方式,便成为了INDEMIND的一个重要技术目标。
为了实现构想,INDEMIND自研了极具自身特色的图像算法,配合自研的融合摄像头及主动补光策略,构建了基础的INDEMIND脏污识别技术。经过多次算法迭代,最终实现了平均脏污检出率99%以上(包含常见固体、液体脏污),支持任何地面材质、花色、光线下的透明、半透明,不透明液体及干涸污渍识别、颗粒状脏污识别、粉末状脏污识别,是目前行业极少成熟且性能优异的技术方案。
重新定义清洁方式
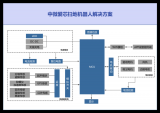
针对不同地面情况,INDEMIND开发了系统化的清洁策略,包含清洁遍数、清洁力度(毛刷压力和速度、出水量等)、清洁时长等,配合INDEMIND基于设备端、云端智能决策平台、大数据平台三端专门建立的智能决策引擎,能够支持机器人自主判断决策清洁方式,如遇到液体时,停止边刷,仅使用拖地功能,以防液体溅射。
同时,机器人不再受制于清洁结构和自身重量,对重度脏污可以自主执行多次清洁及清洁成果检测,提升清洁能力上限,且也意味着机器人开发的硬件选择有了更多可能。
此外,机器人也不再受制于定期清洁计划,具备主动脏污巡检和作业能力,对于使用者更加友好和智能。
需要提到的是,商用清洁机器人在清洁逻辑上的问题和扫地机器人并无本质区别。平均化、全覆盖的清洁逻辑,一是让机器人在重污区域没有清理干净时就需要人为参与检查;二是轻污区域清洁费水费电的情况。看似替代了人力,却又没有完全替代。
脏污识别技术对于扫地机器人以及商用清洁机器人而言,绝非简单意义上的常规升级,而是在重新定义清洁方式,让机器人在行为上真正开始仿生,这与现有产品有着跨代差别。
审核编辑 黄宇
-
扫地机器人
+关注
关注
20文章
789浏览量
53452
发布评论请先 登录
相关推荐
智能扫地机器人的工作原理和构成
扫地机器人应用解决方案
霍尔开关在扫地机器人中的应用
扫地机器人的核心技术突破
扫地机器人避障技术的发展史
隐形清洁大师:灰尘颗粒物压电传感器引领扫地机器人新一轮智能清洁革命

供应 英集芯IP2348,适用于扫地机器人解决方案的锂电池同步降压充电芯片
扫地机器人高温高湿试验标准详解及试验方法

光耦知识分享‖探讨光耦技术在扫地机器人的应用

其利天下技术·搭载无刷电机的扫地机器人的前景如何?
扫地机器人CCC认证申请流程与其他产品的区别是什么?







 工商网监
工商网监
评论