 如何由阻尼比求闭环极点和增益
如何由阻尼比求闭环极点和增益
在自动控制系统中,阻尼比、闭环极点和增益是三个至关重要的参数,它们共同决定了系统的稳定性和动态性能。
一、阻尼比的定义与意义
阻尼比(Damping Ratio),通常表示为ξ(xi),是描述系统阻尼特性的一个重要参数。它反映了系统阻尼器对系统振动的抑制能力,即系统振动的衰减速度。阻尼比越大,系统振动的衰减速度越快,系统的稳定性越好;反之,阻尼比越小,系统振动的衰减速度越慢,系统的稳定性越差。
在二阶系统中,阻尼比ξ与自然频率ω_n一起决定了系统的动态响应特性。二阶系统的传递函数可以表示为: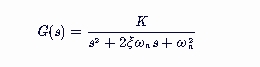
其中,K是系统增益,s是复频率变量,ω_n是系统的自然频率。从这个传递函数中,我们可以看出系统的动态性能与阻尼比ξ、自然频率ω_n以及增益K密切相关。
二、闭环极点的求解
闭环极点是系统闭环传递函数分母为零时的根,它们决定了系统的稳定性和动态响应。在自动控制系统中,通常需要通过调整闭环极点的位置来优化系统的性能。
对于二阶系统,其闭环传递函数可以表示为: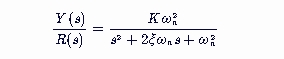
其中,Y(s)是输出信号的拉普拉斯变换,R(s)是输入信号的拉普拉斯变换。闭环极点是该传递函数分母为零时的解,即求解方程:
的根。
这个方程是一个二次方程,其解为: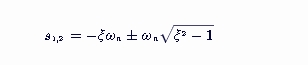
这两个解就是系统的闭环极点。根据阻尼比ξ的不同取值,闭环极点的性质也会有所不同:
- 过阻尼系统(ξ > 1) :此时,方程的两个解都是实数,且均为负值。系统响应将按照指数形式单调逐渐稳定到输入,无振荡现象。
- 临界阻尼系统(ξ = 1) :此时,方程的两个解重合,为一个实数。系统响应同样将按照指数形式单调逐渐稳定到输入,但比过阻尼系统响应更快。
- 欠阻尼系统(0 < ξ < 1) :此时,方程的两个解为一对共轭复数。系统响应为衰减振荡曲线,且逐渐稳定到输入。系统的衰减程度和振荡程度分别由闭环极点的实部和虚部决定。
三、增益的求解与调整
增益K是系统对输入信号的放大倍数,它决定了系统输出的幅值大小。在自动控制系统中,增益的选择对系统的稳定性和动态性能有着重要影响。
对于给定的阻尼比ξ和自然频率ω_n,增益K的选择需要根据系统的具体要求进行。一般来说,可以通过以下步骤来求解和调整增益:
- 确定系统要求 :首先,需要明确系统对稳定性、响应速度和稳态误差等性能指标的要求。
- 选择阻尼比ξ :根据系统要求,选择合适的阻尼比ξ。如果系统需要快速响应且无振荡,可以选择较小的阻尼比;如果系统需要较好的稳定性,可以选择较大的阻尼比。
- 计算闭环极点 :根据选定的阻尼比ξ和自然频率ω_n,计算闭环极点的位置。
- 调整增益K :在保持闭环极点位置不变的情况下,通过调整增益K来满足系统对输出幅值的要求。需要注意的是,增益K的调整可能会影响到系统的稳定性和动态性能,因此需要谨慎进行。
- 仿真验证 :在完成增益K的调整后,需要进行仿真验证以检查系统的性能是否满足要求。如果不满足要求,需要重新调整阻尼比ξ和增益K。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
自动控制系统
+关注
关注
1文章
187浏览量
19324 -
参数
+关注
关注
11文章
1690浏览量
31936 -
函数
+关注
关注
3文章
4245浏览量
62083 -
共极点
+关注
关注
0文章
2浏览量
5586 -
阻尼器
+关注
关注
0文章
40浏览量
11514
发布评论请先 登录
相关推荐
如何去理解增益带宽积 、开环运放带宽、闭环系统的带宽这几个参数?
固定”,这说的是“闭环增益*闭环带宽=增益带宽积”吗??
就针对单个开环运放而言,有“增益带宽积固定”这个说法吗?
目前我们分析系统的频率特
发表于 08-12 07:05
数字化CVCF逆变器中的波形控制方式
(最恶劣的情况),配置极点时应注意逆变器带载以后阻尼比会变大。 取电容电压vC和电容电流iC作为状态变量,PWM逆变器的空载模型为: 引入状态反馈 其中r 是闭环系统参考指令,K是反馈
发表于 09-27 15:09
如何将放大器建模为模拟滤波器,从而提高SPICE仿真速度?
ω轴的径向距离;Q 值越大,则说明极点离 jω轴越近。对于放大器,阻尼比越大,则峰化越低。这些关系为 s域 (s = jω) 传递函数与模拟滤波器电路提供了有用的等效转换途径。设计示例:5倍增益放大器该
发表于 12-01 08:00
请问用在单位增益的闭环负反馈中的op-amp阻尼大不大?
仿一个应用在单位增益的op-amp, 结果是phase margin有90度,然而相位偏差180°时候,gAIn由于零点影响,只是降到0.65,请问用在单位增益的闭环负反馈中,op-amp的阻
发表于 06-25 06:13
二阶闭环系统的频率特性曲线
二阶闭环系统的频率特性曲线一.实验要求1. 研究二阶闭环系统的结构参数--自然频率(无阻尼振荡角频率)ωn、阻尼比ξ对对数幅频曲线和相频曲线的影响。2. 了解和掌
发表于 05-15 00:52
•55次下载
多变量阻尼比灵敏度的有功调制
算法(stochastic subspace identification,ssi)从系统基础运行数据中提取系统振荡频率与阻尼比等,当系统存在弱阻尼模式时发出预警,进而应用多变量阻尼比灵敏度,筛选参调发电机组,并利用优化算法确定
发表于 12-14 13:55
•0次下载

数字陷波器有源阻尼方法
为了解决传统电容电流比例反馈有源阻尼方法控制结构复杂以及由系统延时所导致的谐振阻尼区域狭小等问题,对基于陷波器的有源阻尼方法进行了研究。将系统的谐振
发表于 03-13 14:17
•0次下载

风电系统弱阻尼低频振荡模式抑制
变化,分析弱阻尼低频模式区域极点配置的必要性。兼顾电网原有及新引入弱阻尼低频模式,构建降阶模型。采用基于线性矩阵不等式的区域极点配置法,设计输出反馈控制器,将所有弱
发表于 03-14 10:35
•0次下载
温度和风速对桥梁结构模态频率和阻尼比的影响研究
主要研究温度和风速两个环境因素对桥梁结构模态频率和阻尼比的影响,并建立环境因素与模态参数之 间关系的数学模型。由于风速和温度的相关性较强,提出通过非线性主成分分析将相关的温度 、风速转化为两 个
发表于 04-25 10:21
•0次下载
过阻尼系统的动态性能指标有哪些
过阻尼系统的动态性能指标是衡量系统动态响应特性的重要参数。在工程实践中,过阻尼系统广泛应用于各种机械设备、结构系统和控制系统中。 引言 过阻尼系统是指阻尼比大于临界
提高系统的阻尼比对系统有何影响
阻尼比是衡量系统阻尼程度的一个重要参数,它对系统的动态性能和稳定性有着重要的影响。本文将从以下几个方面探讨提高系统阻尼比对系统的影响: 阻尼比的定义和计算方法
闭环增益对系统动态性能的影响
在自动控制系统中,闭环控制作为一种重要的控制方式,通过引入反馈机制来调整系统的输出,使其更好地适应外部环境的变化。闭环增益作为闭环控制系统中的一个核心参数,对系统的动态性能有着至关重要





 工商网监
工商网监
评论