 闭环增益首一型和尾一型的特点
闭环增益首一型和尾一型的特点
闭环增益是控制系统中的一个重要概念,它描述了系统在闭环工作状态下的放大倍数。闭环增益的类型主要有两种:首一型和尾一型。这两种类型的闭环增益在控制系统的设计和分析中具有不同的应用和特点。
一、闭环增益的基本概念
1.1 闭环控制系统
闭环控制系统是一种反馈控制系统,它通过测量系统的输出信号并与期望的输入信号进行比较,得到误差信号。然后将误差信号输入到控制器中,控制器根据误差信号产生控制信号,进而控制执行器对系统进行调节,使系统的输出信号尽可能接近期望的输入信号。
1.2 闭环增益的定义
闭环增益是指在闭环控制系统中,输入信号与输出信号之间的比值。它反映了系统对输入信号的放大能力。闭环增益的计算公式为:
闭环增益 = 系统输出 / 系统输入
1.3 闭环增益的类型
闭环增益的类型主要有两种:首一型和尾一型。首一型闭环增益是指在控制系统的开环传递函数中,分子的最高次项为1,而分母的最高次项不为1的闭环增益。尾一型闭环增益是指在控制系统的开环传递函数中,分母的最高次项为1,而分子的最高次项不为1的闭环增益。
二、首一型闭环增益
2.1 首一型闭环增益的特点
首一型闭环增益具有以下特点:
- 系统稳定性好:由于首一型闭环增益的分子最高次项为1,因此在控制系统的开环传递函数中,分子的阶数高于分母的阶数,这有助于提高系统的稳定性。
- 快速响应:首一型闭环增益的分子阶数较高,使得系统在输入信号变化时,输出信号能够快速跟随输入信号,具有较好的动态性能。
- 抗干扰能力较强:由于首一型闭环增益的分子阶数较高,系统对外部干扰的抑制能力较强,能够减小干扰对系统性能的影响。
2.2 首一型闭环增益的计算方法
首一型闭环增益的计算方法如下:
- 确定系统的开环传递函数:首先需要确定控制系统的开环传递函数,通常表示为G(s)。
- 计算闭环传递函数:根据闭环控制系统的基本原理,闭环传递函数可以表示为T(s) = G(s) / (1 + G(s)H(s)),其中H(s)为反馈环节的传递函数。
- 计算闭环增益:将闭环传递函数T(s)代入闭环增益的计算公式,即可得到首一型闭环增益。
2.3 首一型闭环增益的应用
首一型闭环增益在实际应用中具有广泛的应用,例如在工业自动化、航空航天、机器人技术等领域。首一型闭环增益能够提供较好的稳定性和动态性能,因此在需要快速响应和抗干扰能力较强的场合,首一型闭环增益是一个较好的选择。
三、尾一型闭环增益
3.1 尾一型闭环增益的特点
尾一型闭环增益具有以下特点:
- 系统稳定性较差:由于尾一型闭环增益的分母最高次项为1,因此在控制系统的开环传递函数中,分母的阶数高于分子的阶数,这可能导致系统的稳定性较差。
- 响应速度较慢:尾一型闭环增益的分母阶数较高,使得系统在输入信号变化时,输出信号的响应速度较慢,动态性能较差。
- 抗干扰能力较弱:由于尾一型闭环增益的分母阶数较高,系统对外部干扰的抑制能力较弱,容易受到干扰的影响。
3.2 尾一型闭环增益的计算方法
尾一型闭环增益的计算方法与首一型闭环增益类似,主要包括确定系统的开环传递函数、计算闭环传递函数和计算闭环增益三个步骤。
3.3 尾一型闭环增益的应用
尾一型闭环增益在实际应用中相对较少,但在某些特定场合,例如需要降低系统响应速度以减少能耗或减小机械磨损的场合,尾一型闭环增益可能会被选用。
-
控制系统
+关注
关注
41文章
6695浏览量
111176 -
测量系统
+关注
关注
2文章
548浏览量
41690 -
输出信号
+关注
关注
0文章
295浏览量
12000 -
闭环增益
+关注
关注
0文章
13浏览量
2051
发布评论请先 登录
相关推荐
运放的闭环增益问题
[经验] 运放闭环学习笔记:第一讲:运放开环缺点及闭环优点
浅析主通路和反馈通路的开环增益与闭环增益
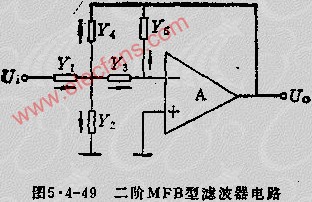
无限增益多端反馈型滤波器





 工商网监
工商网监
评论