 RK3568驱动指南|第十六篇 SPI-第195章 实践:移植官方mcp2515驱动
RK3568驱动指南|第十六篇 SPI-第195章 实践:移植官方mcp2515驱动
瑞芯微RK3568芯片是一款定位中高端的通用型SOC,采用22nm制程工艺,搭载一颗四核Cortex-A55处理器和Mali G52 2EE 图形处理器。RK3568 支持4K 解码和 1080P 编码,支持SATA/PCIE/USB3.0 外围接口。RK3568内置独立NPU,可用于轻量级人工智能应用。RK3568 支持安卓 11 和 linux 系统,主要面向物联网网关、NVR 存储、工控平板、工业检测、工控盒、卡拉 OK、云终端、车载中控等行业。
第195章 实践:移植官方mcp2515驱动
在前面的章节中从零编写了一个mcp2515的驱动程序,旨在对SPI驱动相关的知识进行学习,但实际上mcp2515的驱动程序在内核中已经提供了,在本章节将会讲解如何移植官方mcp2515驱动。
195.1 内核和设备树配置
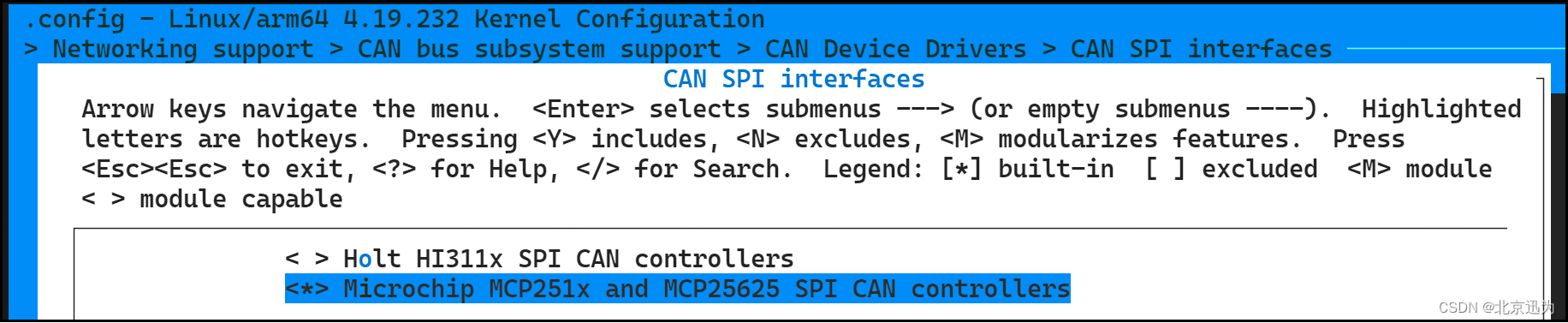
Linux内核源码中默认已经有了MCP2515的驱动程序,驱动具体路径为“linux_sdk/kernel/drivers/net/can/spi/mcp251x.c”,所以只需要在make menuconfig图形化配置界面选中即可。
> Networking support
> CAN bus subsystem support
> CAN Device Drivers
> CAN SPI interfaces
<*> Microchip MCP251x and MCP25625 SPI CAN controllers
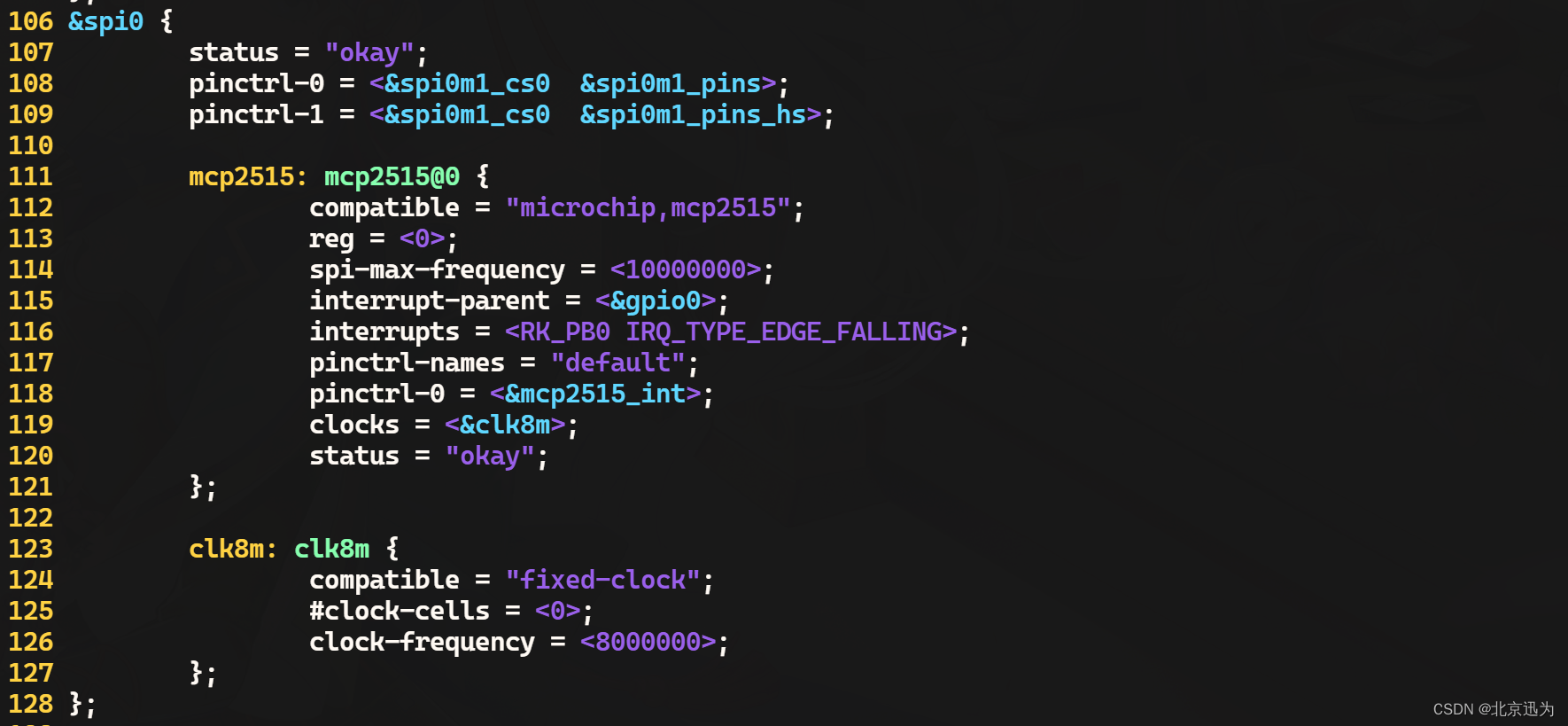
然后在kernel/arch/arm64/boot/dts/rockchip/rk3568-evb1-ddr4-v10.dtsi设备树中添加如下节点:
&spi0 {
status = "okay";
pinctrl-0 = <&spi0m1_cs0 &spi0m1_pins>;
pinctrl-1 = <&spi0m1_cs0 &spi0m1_pins_hs>;
mcp2515: mcp2515@0 {
compatible = "microchip,mcp2515";
reg = <0>;
spi-max-frequency = <10000000>;
interrupt-parent = <&gpio0>;
interrupts = ;
pinctrl-names = "default";
pinctrl-0 = <&mcp2515_int>;
clocks = <&clk8m>;
status = "okay";
};
clk8m: clk8m {
compatible = "fixed-clock";
#clock-cells = <0>;
clock-frequency = <8000000>;
};
};
然后在pinctrl节点下添加以下内容
mcp2515-gpio{
mcp2515_int:mcp2515-int {
rockchip,pins = <0 RK_PB0 RK_FUNC_GPIO &pcfg_pull_none>;
};
};

保存修改配置,然后重新编译内核镜像,修改好的设备树以及编译好的内核镜像存放路径为“iTOP-3568开发板\03_【iTOP-RK3568开发板】指南教程\02_Linux驱动配套资料\04_Linux驱动程序\121_mcp2515_08”。
195.2 运行测试
首先需要确保烧写的是上一小节修改编译出来的内核镜像,系统启动之后,输入“ifconfig -a”命令,如下图所示,可以看到生成的can1设备。

接下来输入以下命令进行回环测试:
ip link set can1 down
ip link set can1 type can bitrate 250000
ip link set can1 type can loopback on
ip link set up can1
candump can1 -L &
cansend can1 123#1122334455667788

如上图所示,发送和接收的数据是一样的,说明回环测试成功!
至此,移植官方MCP2515驱动实验完成!
————————————————
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
原文链接:https://blog.csdn.net/BeiJingXunWei/article/details/140181160
-
soc
+关注
关注
38文章
4236浏览量
219735 -
SPI
+关注
关注
17文章
1730浏览量
92685 -
瑞芯微
+关注
关注
24文章
451浏览量
51679 -
RK3568
+关注
关注
4文章
535浏览量
5429
发布评论请先 登录
相关推荐
文档更新 |迅为 RK3568开发板驱动指南-第十五/十六篇
如何解决扩展CAN芯片MCP2515的驱动移植问题?
RK3288上的can bus芯片MCP2515不能正常使用如何解决
iTOP-RK3568开发板驱动指南第五篇-中断
更新 | 持续开源 迅为RK3568驱动指南第十一篇-pinctrl子系统
RK3568驱动指南|驱动基础进阶篇-进阶5 自定义实现insmod命令实验






 工商网监
工商网监
评论