 基于VPLC7机器视觉运动控制一体机的UVW视觉对位解决方案
基于VPLC7机器视觉运动控制一体机的UVW视觉对位解决方案
一、市场应用背景
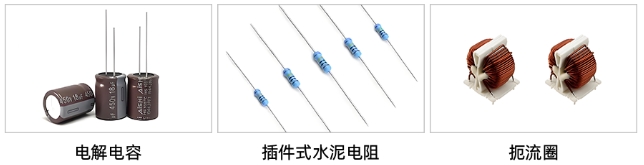
随着平板显示器(包括TFT/LCD、PDP和OLED)等产品的尺寸增大,以及同时需要兼容小型化高精度产品的需求加剧,各大厂商对视觉对位工艺流程的负载能力、移动平台范围、效率和精度提出了更高的要求。因此,UVW对位平台成为满足这些需求用户的理想选择。
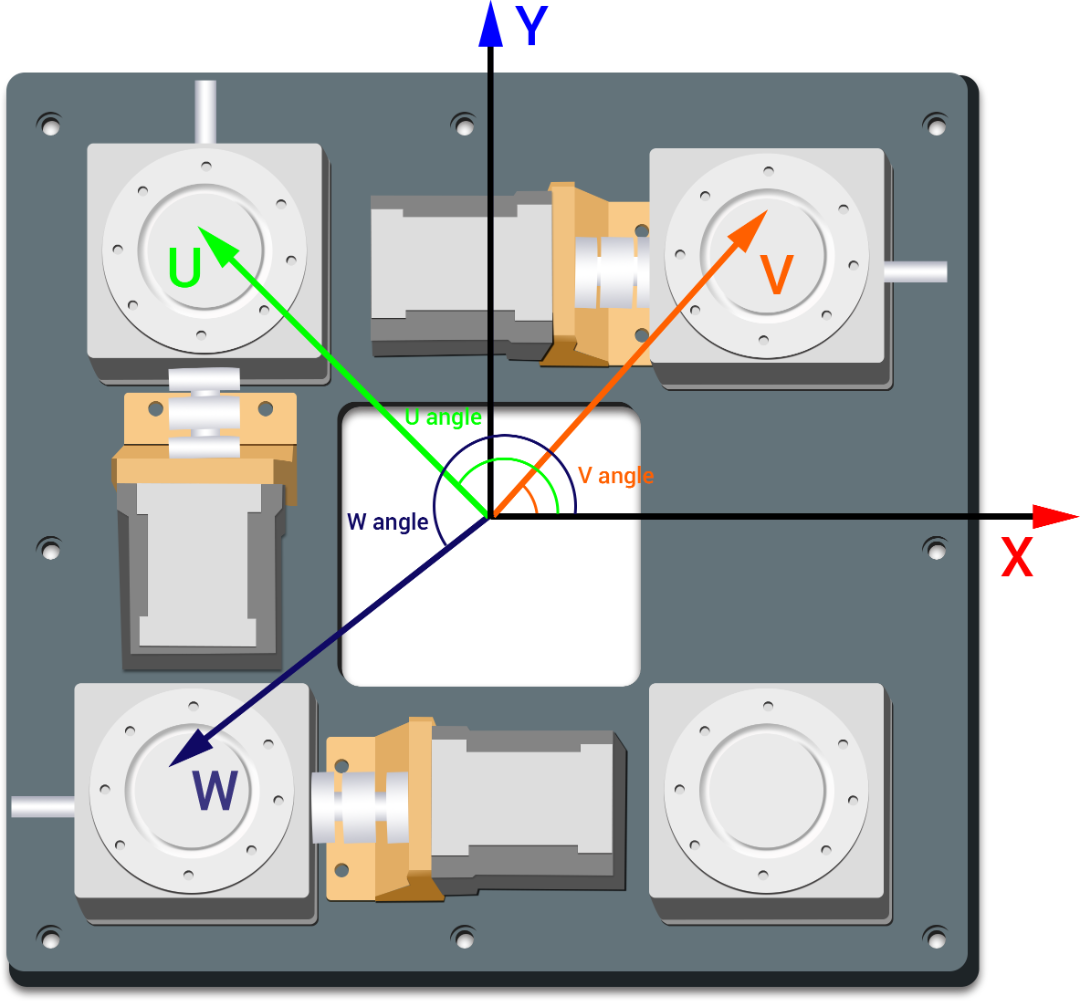
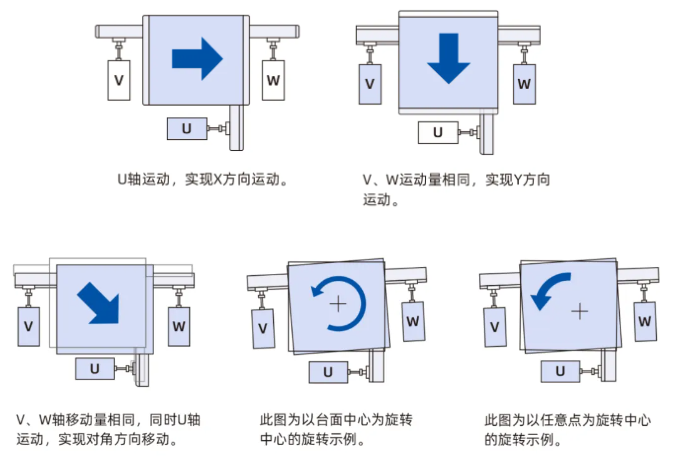
UVW对位平台,也称XXY对位平台,属于三轴并联运动机构,通过三个线性运动轴的协同控制,能够实现以平面上任意一点的中心旋转和任意方向平移。配合CCD视觉系统,平台在X-Y平面和θ角度进行精密微调,从而达到高精度视觉对位功能,精度可达±0.001mm。
UVW视觉对位平台广泛应用于需要高速高精位置对齐的智能装备,包括曝光机、邦定机、丝网印刷机、晶圆对位、PCB钻孔机、贴合机(LCD/FPC)、视觉模切机、锂电池叠片等。
传统XYθ平台方案存在的局限性:
XYθ平台的结构相对简单,主要由两个X、Y直线轴和一个旋转轴组成,主要进行XY平面内的位移和中心旋转运动,无法根据任意一点坐标进行中心旋转,影响其在高精度视觉对位场合中应用,灵活性不高。
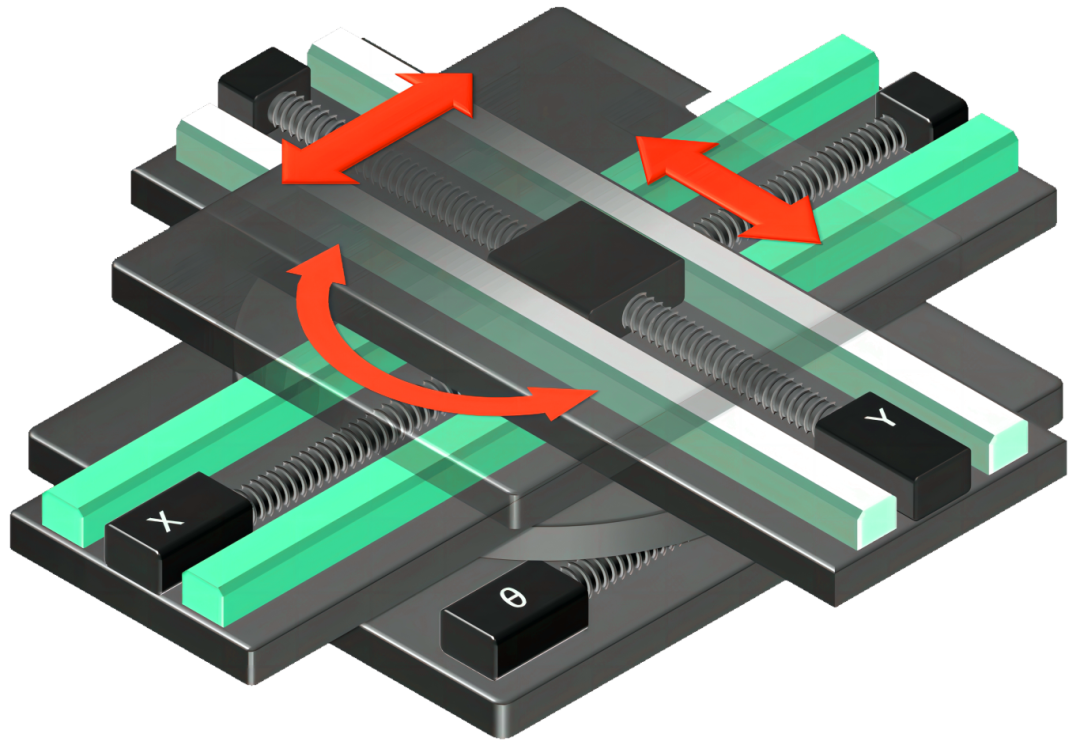
XYθ平台的垂直堆叠结构使得工作台较为笨重,不便于快速移动或调整,不方便与其他运动轴进行融合,降低了自动化设备开发的效率。XYθ平台与UVW平台相比,其在刚性、负载能力及重复定位精度方面也有所不足,限制了其在高速高精的视觉对位场合中的应用。
正运动技术解决方案:
正运动技术针对现有市场需求,开发了一种基于VPLC7系列机器视觉运动控制一体机的UVW视觉对位解决方案,用户通过选择对应模型的轴列表,使用对应指令建立机械手正逆解,转换为各联动轴的移动距离。配合高精度CCD视觉系统,即可快速实现高速高精的双目或四目UVW视觉对位应用。
正运动技术的UVW平台运动控制算法兼容三种常见模型:FRAME33、FRAME34、FRAME37分别对应两种机械结构(PRP、PPR)跟两个坐标系方向(XYY、XXY),可以实现单轴直线运动、两轴线性插补、两轴圆弧插补、空间圆弧等复杂运动。
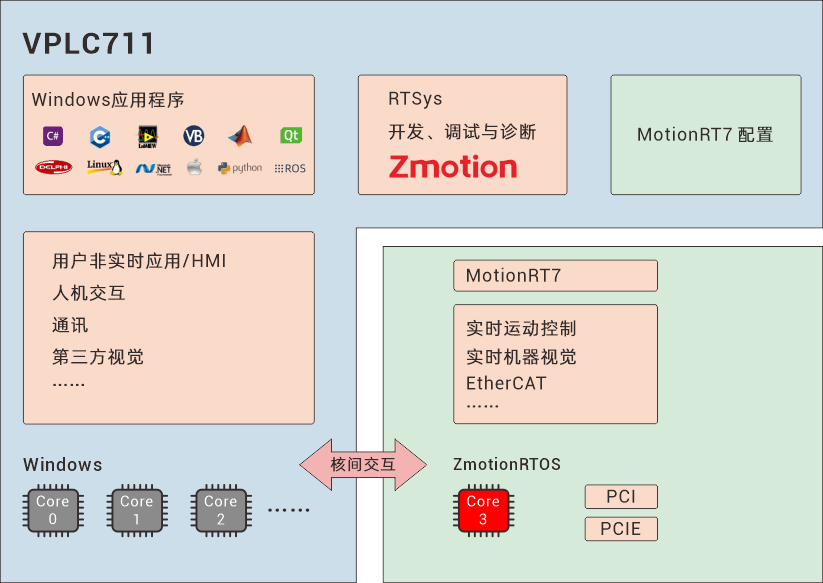
VPLC7系列机器视觉运动控制一体机集成视觉和运控于一体,替代传统的PC工控机+视觉软件+运动控制方案,硬件接线更方便,成本更低。搭载正运动技术运动控制实时内核MotionRT7,核内交互,指令调用速度快至us级,提升加工和检测效率。

二、VPLC7机器视觉运动控制一体机在UVW视觉对位的应用
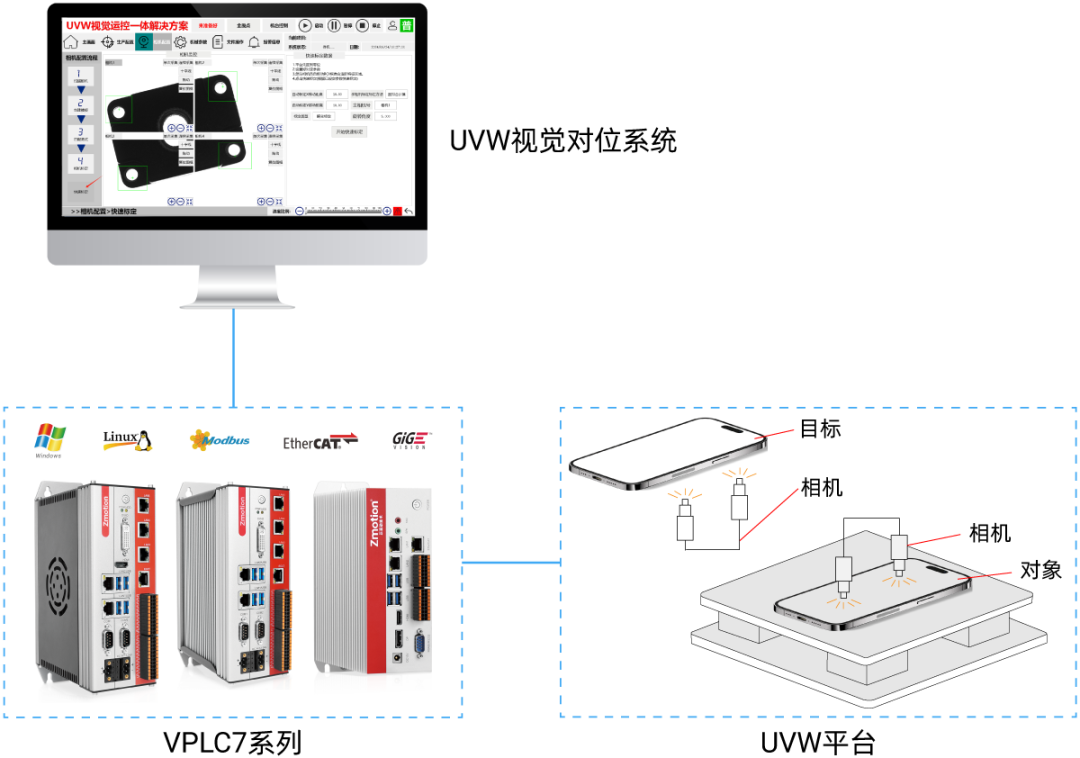 UVW视觉四目对位应用示意图
UVW视觉四目对位应用示意图
传统的UVW视觉对位方案
工控机+视觉软件+运动控制卡的组合方案,配件多,接线复杂,视觉与运动控制需要相互数据交互,故障排查麻烦,并且多套硬件成本和维护较高。
正运动技术UVW视觉对位方案设计
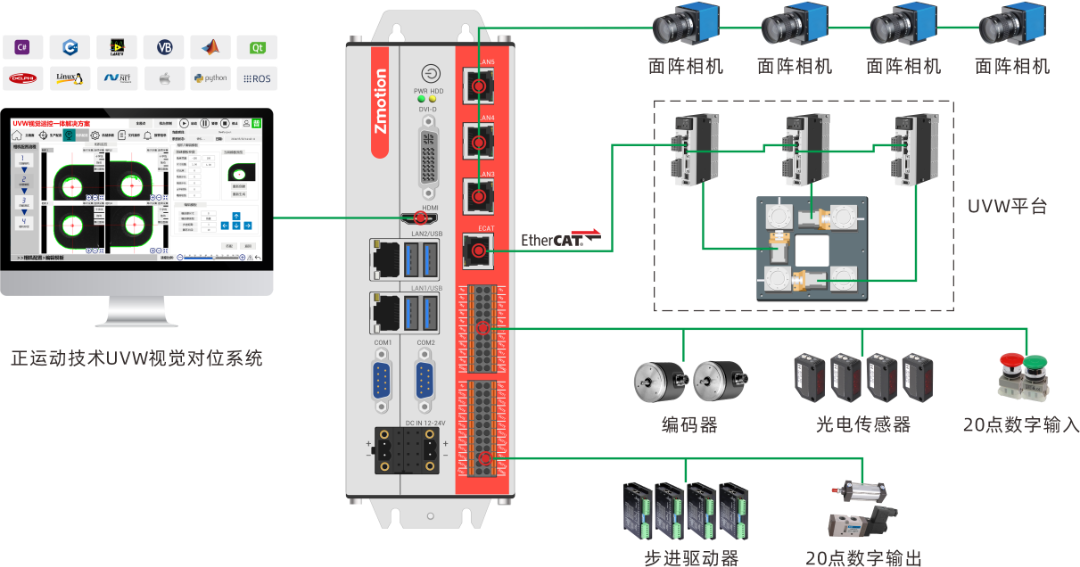
EtherNET接口:千兆网口,通过交换机最多可接8个相机;
EtherCAT接口:接EtherCAT总线驱动器,控制UVW驱动电机;
20DI:接原点、限位等传感器,以及开关信号等;
20DO:接输出开关信号,也可接单端脉冲输出(500KHz);
HDMI接口:接显示屏;
USB接口:接鼠标键盘等。
运动控制与机器视觉实现过程
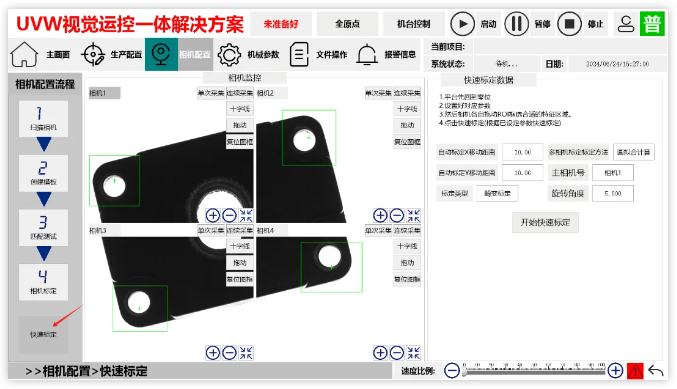
(1)机器视觉
根据具体应用需求,使用2个或4个面阵相机进行拍摄对位标记点。通过配置相机参数和选择Mark点创建目标区域即可一步完成标定,获取标定系数,简化视觉操作步骤,降低了现场应用的难度。
系统自动计算出目标位置与实际位置之间的偏差(包括U、V、W轴的位置偏移及θ轴的角度偏移),实现UVW视觉对位功能。
(2)运动控制
选择对应模型的轴列表,设置关节轴参数及虚拟轴参数,确定机械手零点位置(RAME33需要保证VW轴是水平的。平台上任意一点可作为零点,保证结构参数正确即可),之后使用对应指令建立机械手正逆解,计算出UVW平台的三轴原始位置与2个或4个面阵相机获得的相对坐标之间的关系。
在确定 ΔU、ΔV和ΔW后,最后UVW平台便能沿三个轴线性地执行旋转和平移动作,以补偿位置和角度的偏差,实现高速高精的视觉对位应用。
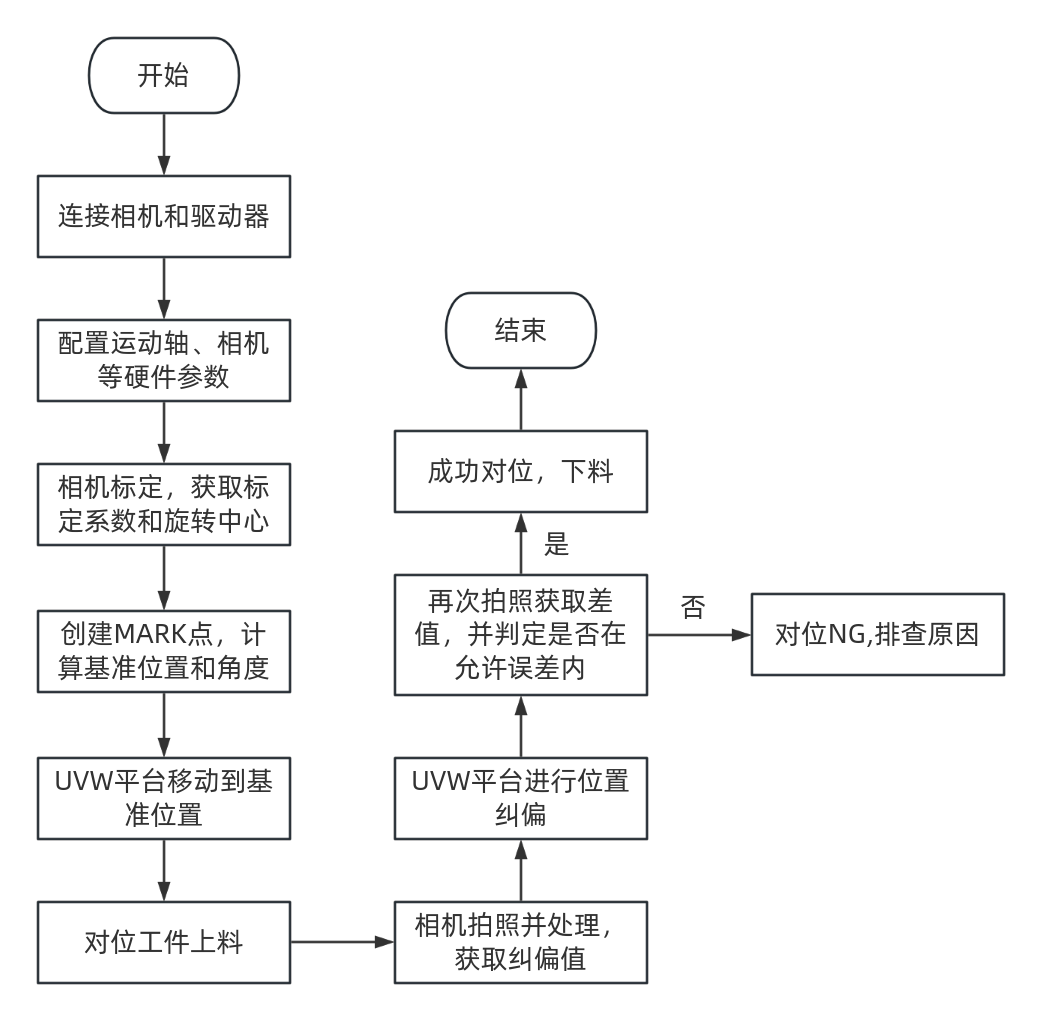
UVW视觉对位工艺流程
方案核心优势
集成机器视觉、UVW控制和运动控制于一体,硬件接线更方便,成本更低;
运动控制实时内核,核内交互,指令调用速度快至us级,提升加工效率;
通过自动校准确定相机和工作台之间的位置关系,提高节拍;
内置视觉算法,精度高,双相机定位精度在2个像素以内;
统一的API函数接口,适用各种PC上位机语言开发,易于客户集成到配备现有系统中,创建高速、高精的视觉对位系统。

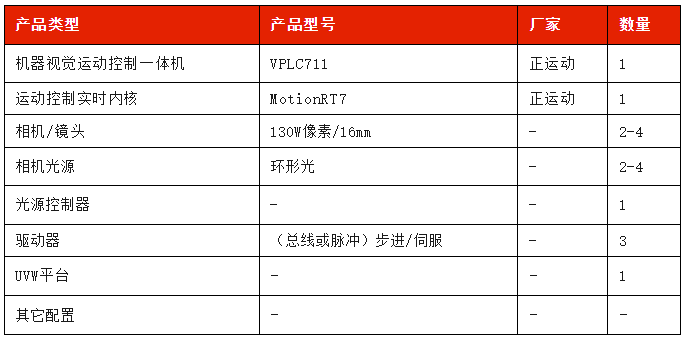
解决方案硬件配置
三、VPLC7系列机器视觉运动控制一体机
正运动技术VPLC7系列机器视觉运动控制一体机是一款基于x86平台和Windows操作系统的高性能机器视觉EtherCAT运动控制器,可脱机运行,支持丰富的IO控制,30+机器人算法,以及视觉和运动控制功能,大幅简化视觉与运动控制项目的配置流程。
VPLC7系列机器视觉运动控制一体机的安装与拆卸过程便捷,占地空间小,还能与其它控制单元部件(如伺服驱动器、传感器、编码器、控制阀等)和MES系统无缝集成,提供一个完整端到端的视觉运动控制解决方案。

可选6-64轴运动控制(脉冲+EtherCAT总线)
内置实时内核MotionRT7,支持第三方视觉软件
板载20路通用输入(其中10路为高速输入),20路高速输出
提供一体化开放式IPC形态的实时软控制器/软PLC集成的视觉+运动控制解决方案
多核并行运算,能够高效处理运动控制,机器视觉等自动化设备核心任务
审核编辑 黄宇
-
机器视觉
+关注
关注
162文章
4405浏览量
120658
发布评论请先 登录
相关推荐










 工商网监
工商网监
评论