 CAN总线和EtherCAT的区别
CAN总线和EtherCAT的区别
CAN总线和EtherCAT是两种在工业自动化和控制领域广泛应用的通信总线协议,它们各自具有独特的技术特点和应用场景。以下是对CAN总线和EtherCAT之间区别的详细分析,包括技术原理、传输速度、实时性能、网络拓扑、灵活性和扩展性等方面。
一、技术原理
CAN总线 :
- CAN总线全称为Controller Area Network,是一种用于实时控制的串行通信协议。
- 它采用分布式冲突检测与非破坏性位定时的技术原理,通过总线上的节点共享传输媒介(如双绞线)进行通信。
- CAN总线使用差分信号传输,具有较强的抗干扰能力,适用于工业环境中的复杂电磁环境。
EtherCAT :
- EtherCAT全称为Ethernet for Control Automation Technology,是一个开放架构,以以太网为基础的现场总线系统。
- EtherCAT基于以太网技术,使用主从结构和主站广播的方式,在一个以太网帧内实现了多个从站设备的同步通信。
- EtherCAT利用“飞速传输”技术,节点在接收数据帧的同时进行数据处理,并转发给下一个节点,从而大大减少了数据传输的延迟。
二、传输速度
CAN总线 :
- CAN总线的传输速度一般为几百kbps到数Mbps,适用于中低速应用场景。
- 尽管其传输速率已经足够满足许多工业控制需求,但在需要更高带宽的应用中可能有所不足。
EtherCAT :
- EtherCAT支持更高的传输速度,通常可达到100Mbps或更高,甚至可以达到千兆以太网的速度。
- 这种高速传输特性使得EtherCAT非常适合需要快速实时通信的高速应用,如高速生产线上的数据传输和控制。
三、实时性能
CAN总线 :
- CAN总线在实时性方面表现出色,可以实现微秒级的响应时间。
- 它采用高优先级的仲裁机制,确保关键报文的优先传输,满足实时控制的需求。
EtherCAT :
四、网络拓扑
CAN总线 :
- CAN总线通常采用总线形式连接节点,各节点按照优先级依次发送数据。
- 这种拓扑结构使得CAN总线在故障一个节点时,不会影响整个网络的运行,具有较高的可靠性和容错能力。
EtherCAT :
- EtherCAT采用星形或线型拓扑结构,其中的主站可以直接与每个从站进行通信。
- 这种结构使得EtherCAT在扩展性和灵活性方面更具优势,可以方便地添加和移除从站以满足系统需求。
五、灵活性和扩展性
CAN总线 :
- CAN总线适用于较小规模的系统,可以连接几十个节点。
- 它具有较高的灵活性和可扩展性,但在大规模系统中可能需要更多的总线分段和仲裁机制来确保通信的顺畅。
EtherCAT :
- EtherCAT支持大规模网络,并且可以方便地添加和移除从站以满足系统需求。
- 其灵活性和扩展性使得EtherCAT在复杂和大型工业自动化系统中具有显著优势。
六、应用场景
CAN总线 :
- CAN总线广泛应用于汽车电子、工业自动化、医疗设备等多个领域。
- 在汽车电子中,CAN总线用于连接各个ECU(电控单元),实现车辆内部的数据传输和通信。
- 在工业自动化中,CAN总线用于生产线控制、机器人控制等场景,其高可靠性和实时性得到了广泛认可。
EtherCAT :
- EtherCAT以其高速实时通信的特点,在需要高带宽和低延迟的应用中占据重要地位。
- 它被广泛应用于高速生产线、精密控制系统等场景,如半导体制造、机器人控制等领域。
七、总结
CAN总线和EtherCAT作为两种重要的工业通信总线协议,各自具有独特的技术特点和应用场景。CAN总线以其高可靠性、实时性和抗干扰能力,在汽车电子、工业自动化等领域得到广泛应用;而EtherCAT则以其高速实时通信、低延迟和高精度同步性能,在需要高带宽和低延迟的应用中展现出显著优势。在选择总线协议时,需要根据具体的应用需求和系统规模进行综合考虑,以确保系统的稳定运行和高效工作。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
CAN总线
+关注
关注
145文章
1946浏览量
130725 -
工业自动化
+关注
关注
17文章
2368浏览量
67218 -
ethercat
+关注
关注
18文章
686浏览量
38670
发布评论请先 登录
相关推荐
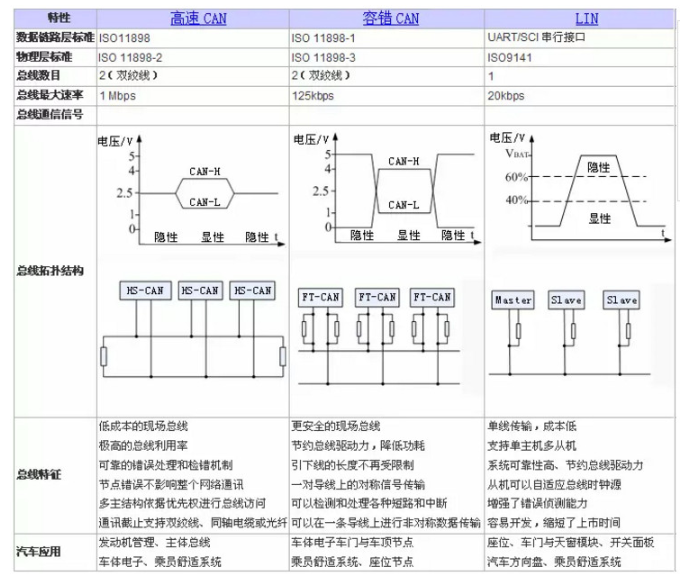
高速CAN总线和低速CAN总线的特性
在ISO 11898-2和ISO 11898-3中分别规定了两种CAN总线结构(在BOSCH CAN2.0规范中,并没有关于总线拓扑结构的说明):高速
发表于 04-07 09:30
•2864次阅读


CAN总线是什么 CAN总线的作用
IICSPICAN485USB工业以太网EtherCATEtherCAT传输性能EtherCAT应用层协议层CoE协议现场总线最近的实验需要较高的运动控制速率。市场上大部分的驱动板目前只支持CAN通信。毕竟
发表于 08-06 07:44
LIN总线是什么?CAN/LIN总线的区别与结构
花点时间看了一些关于LIN总线基础的内容,把其中的关键点提取了出来,在这里分享给大家。在这里你可能要问“不都有CAN总线了吗?这个LIN总线又是从哪里来的?”其实理由很简单,就是
高速CAN总线和低速CAN总线区别分析
高速CAN总线上为显性电平(逻辑0)时,CAN_H为3.5V、CAN_L为1.5V,此时电压差是2V,显性状态的CAN
发表于 09-13 16:57
•4735次阅读
CAN总线与plccan总线的区别
plccan总线通讯的意义就在于提高了PLC工作的稳定性和安全性,毕竟CAN总线可以算得上是最稳的几类现场总线之一了。
总线分为哪三类 CAN总线和EtherCAT区别
CAN总线采用分布式冲突检测与非破坏性位定时的技术原理,通过总线上的节点共享传输媒介(如双绞线)进行通信。EtherCAT则基于以太网技术,使用主从结构和主站广播的方式,在一个以太网帧
发表于 06-28 16:28
•1.4w次阅读
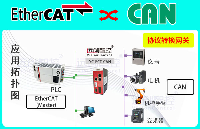
CAN转ETHERCAT网关将CAN总线和ETHERCAT网络连接方法
由于好多现场会出现将CAN总线的设备接到EtherCAT网络中,由于协议的不相同,不能直接进行连接,现需一种能同时兼容CAN 总线和

CAN转ETHERCAT网关将CAN总线和ETHERCAT网络连接方法
由于好多现场会出现将CAN总线的设备接到EtherCAT网络中,由于协议的不相同,不能直接进行连接,现需一种能同时兼容CAN 总线和

CAN转ETHERCAT网关将CAN 总线和 ETHERCAT 网络连接方法
由于好多现场会出现将CAN总线的设备接到EtherCAT网络中,由于协议的不相同,不能直接进行连接,现需一种能同时兼容CAN 总线和

EtherCAT转CAN总线协议转换网关
远创智控YC-ECT-CAN实现连接CAN设备和网络到EtherCAT系统。该网关可实现双向数据交换,既允许现有的、低成本的CAN设备集成到Ethe
RS485总线与CAN总线有什么区别
RS485总线与CAN总线都是工业现场通信中常用的总线技术,它们各自具有独特的特点和优势,适用于不同的应用场景。以下是对这两种总线的详细对比
CAN总线与LIN总线的区别
随着汽车电子系统的复杂性增加,车辆内部通信的需求也在不断增长。CAN总线和LIN总线作为两种主要的车载通信协议,各自扮演着重要的角色。 1. 设计原理 CAN





 工商网监
工商网监
评论