 e2studio开发磁力计LIS2MDL(1)----轮询获取磁力计数据
e2studio开发磁力计LIS2MDL(1)----轮询获取磁力计数据
概述
本文将介绍如何使用 LIS2MDL 传感器来读取数据。主要步骤包括初始化传感器接口、验证设备ID、配置传感器的数据输出率和滤波器,以及通过轮询方式持续读取磁力数据和温度数据。读取到的数据会被转换为适当的单位并通过串行通信输出。 这个传感器常用于多种电子设备中,以提供精确的磁场强度数据,从而用于指南针应用、位置追踪或者动作检测等功能。
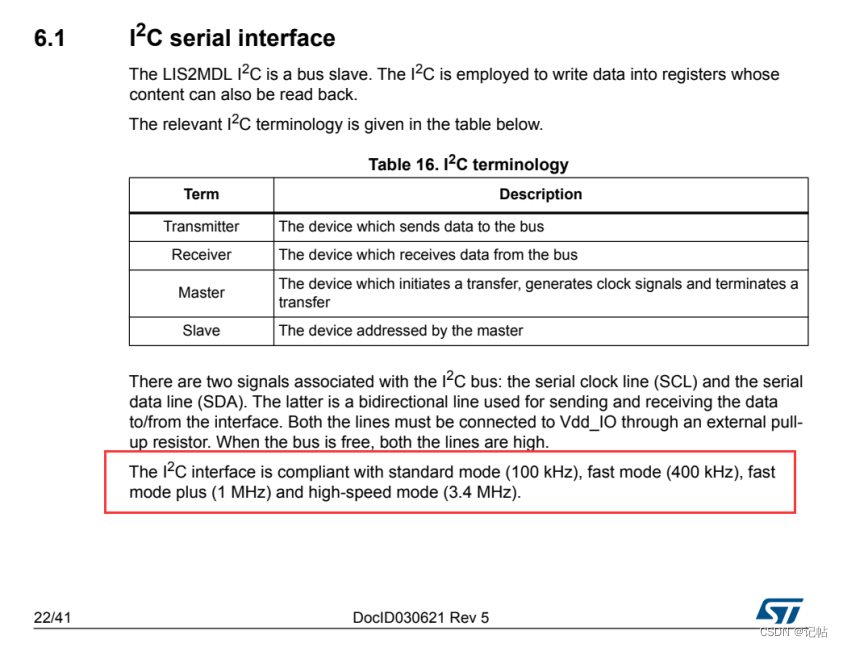
速率
该模块支持的速度为普通模式(100k)、快速模式(400k)、快速模式+(1M)、高速模式(3.4M)。
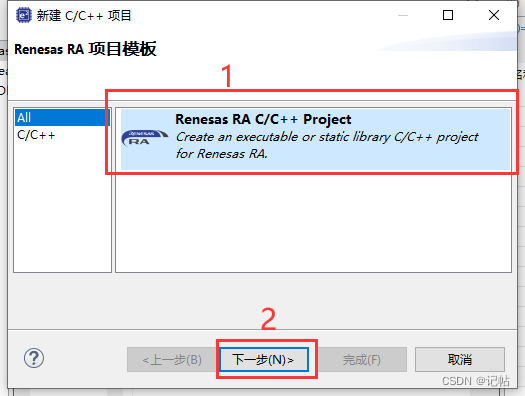
新建工程

工程模板
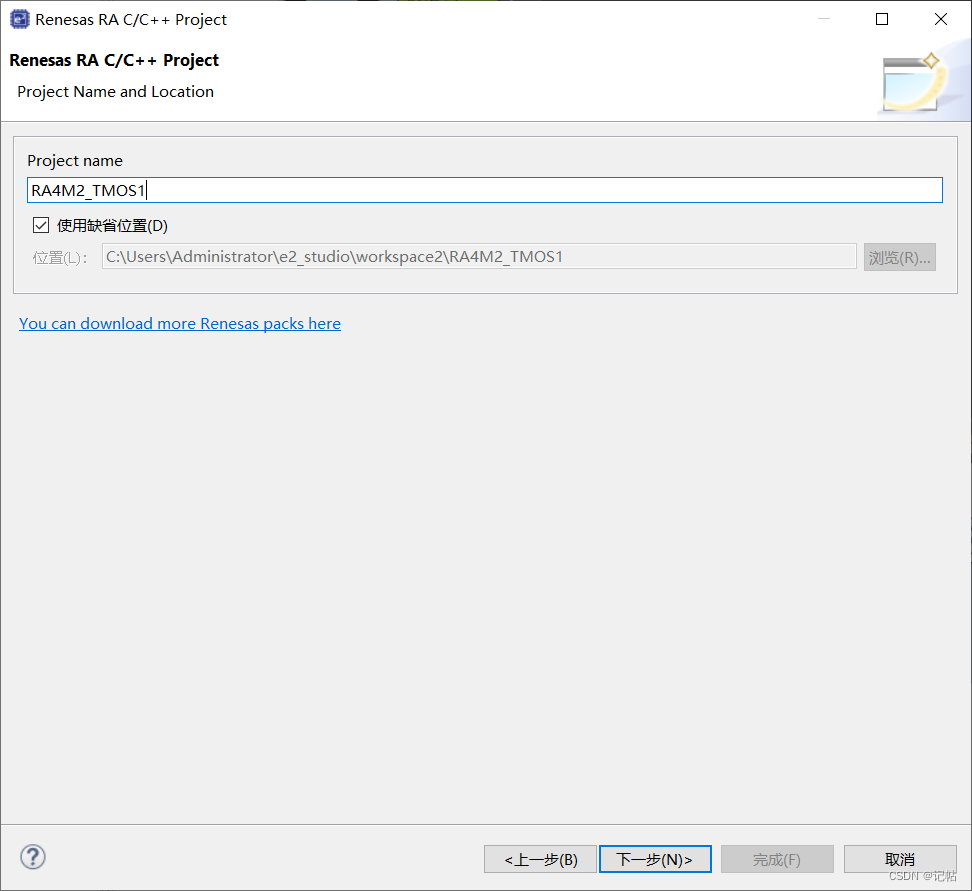
保存工程路径
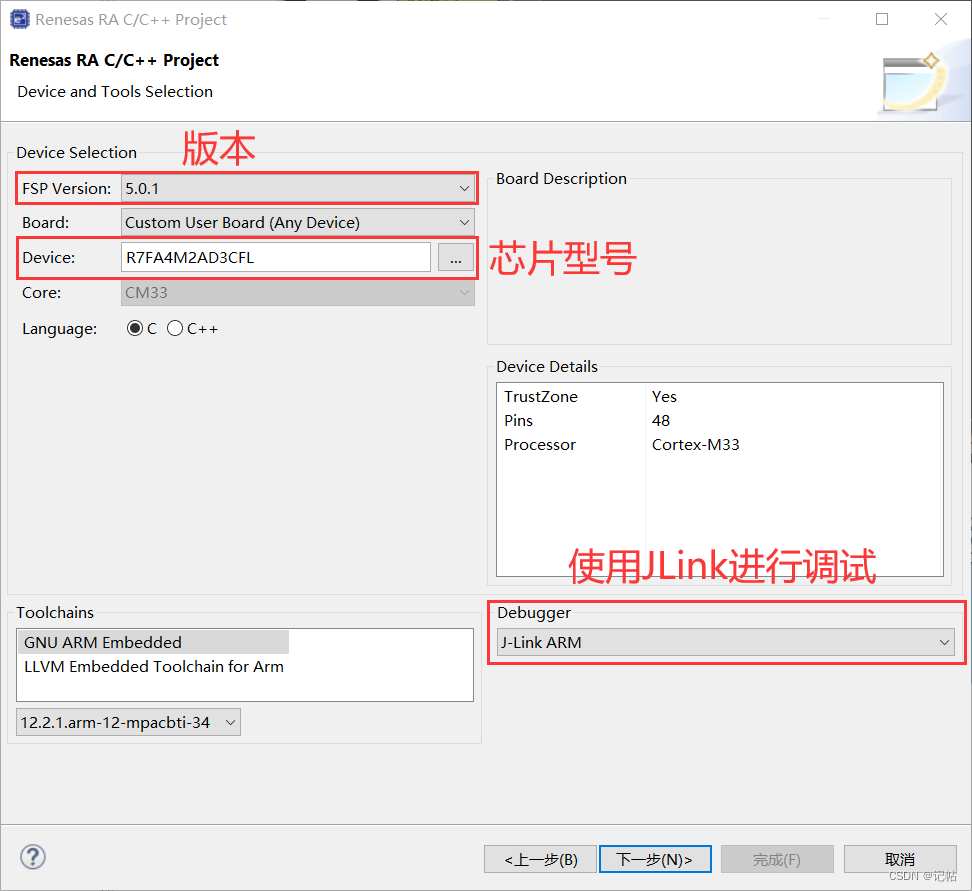
芯片配置
本文中使用R7FA4M2AD3CFL来进行演示。
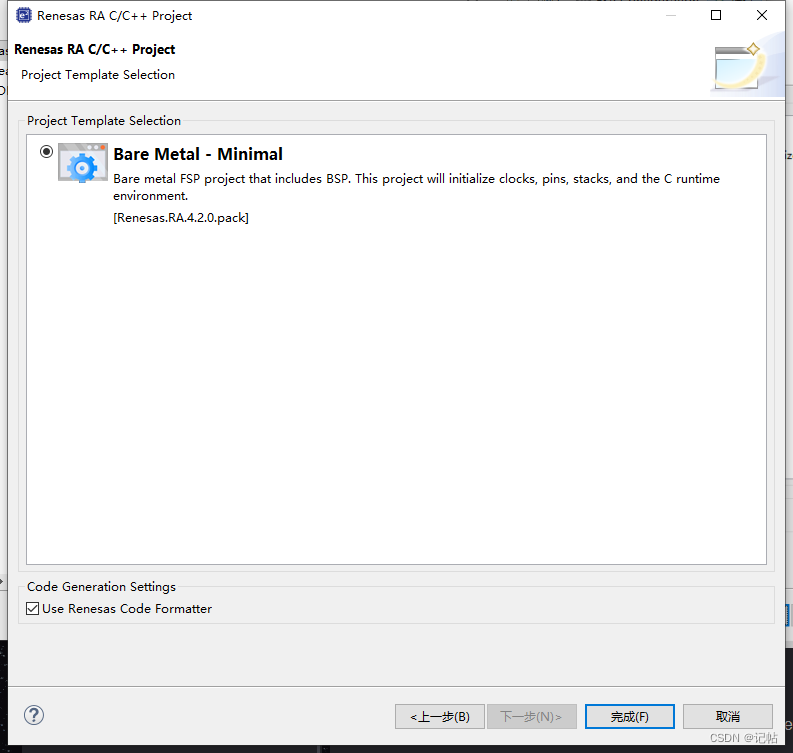
工程模板选择
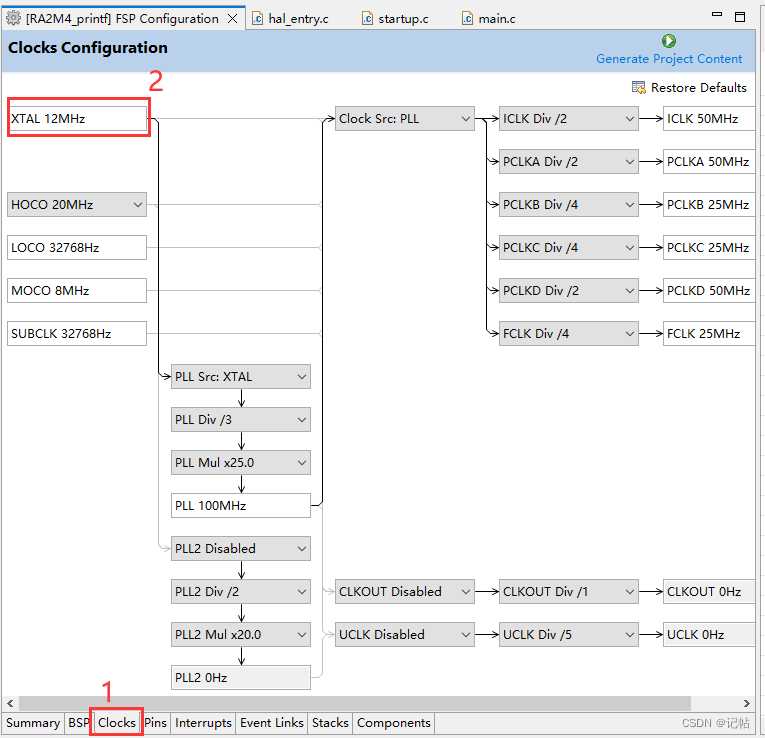
时钟设置
开发板上的外部高速晶振为12M.
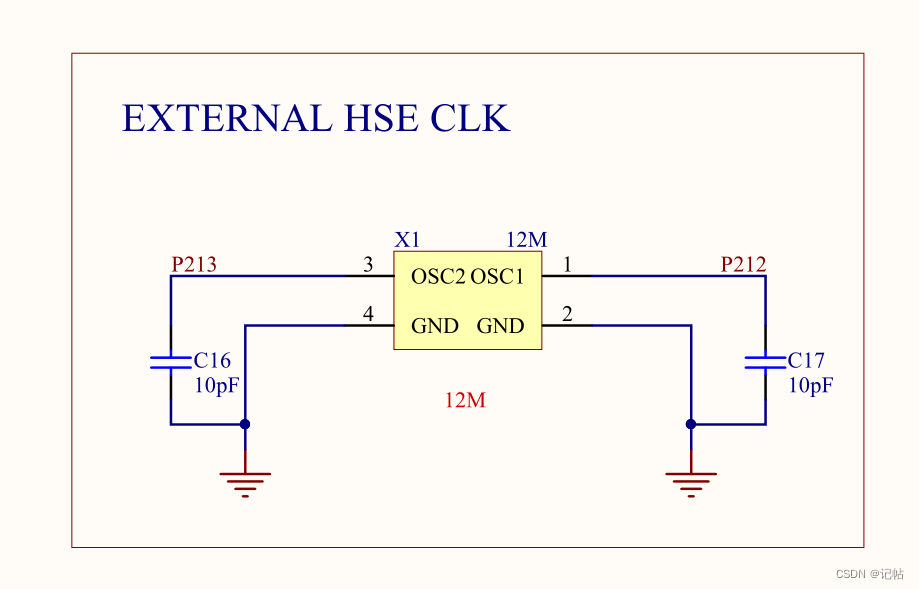
需要修改XTAL为12M。
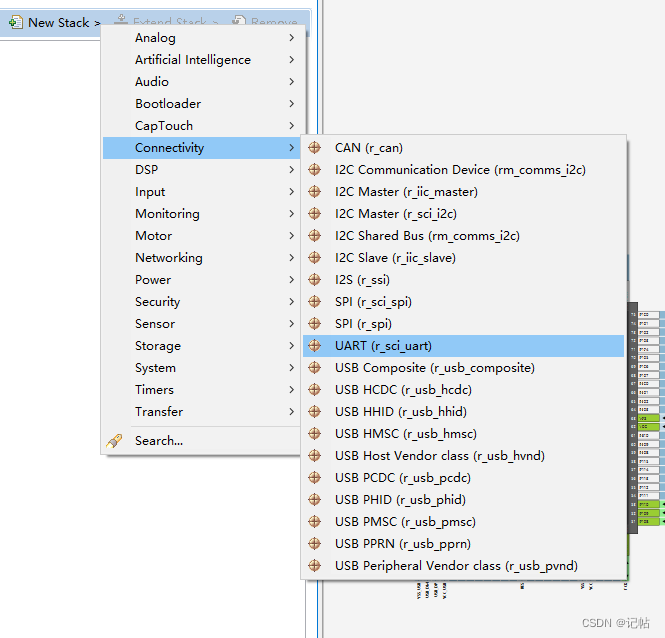
UART配置
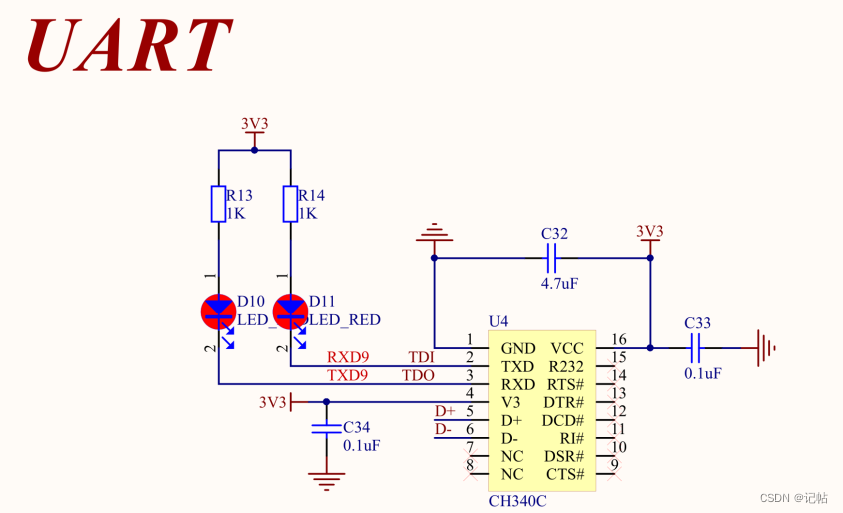
点击Stacks->New Stack->Driver->Connectivity -> UART Driver on r_sci_uart。
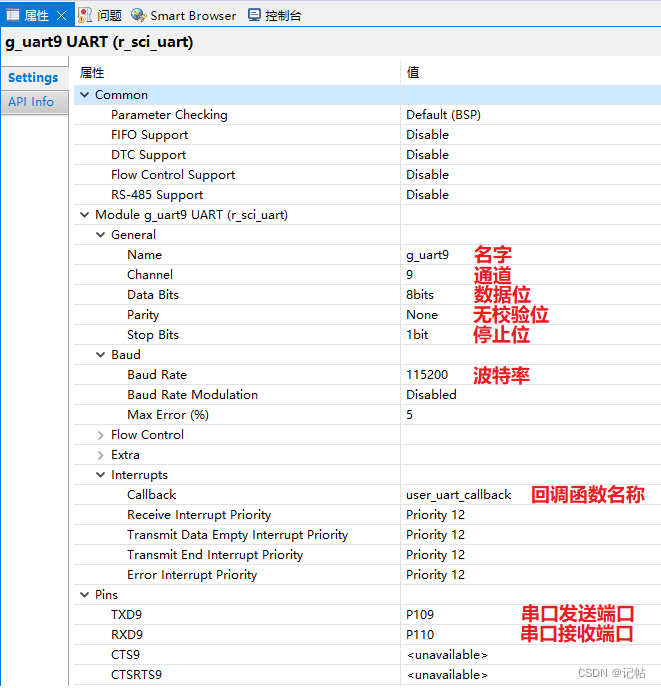
UART属性配置
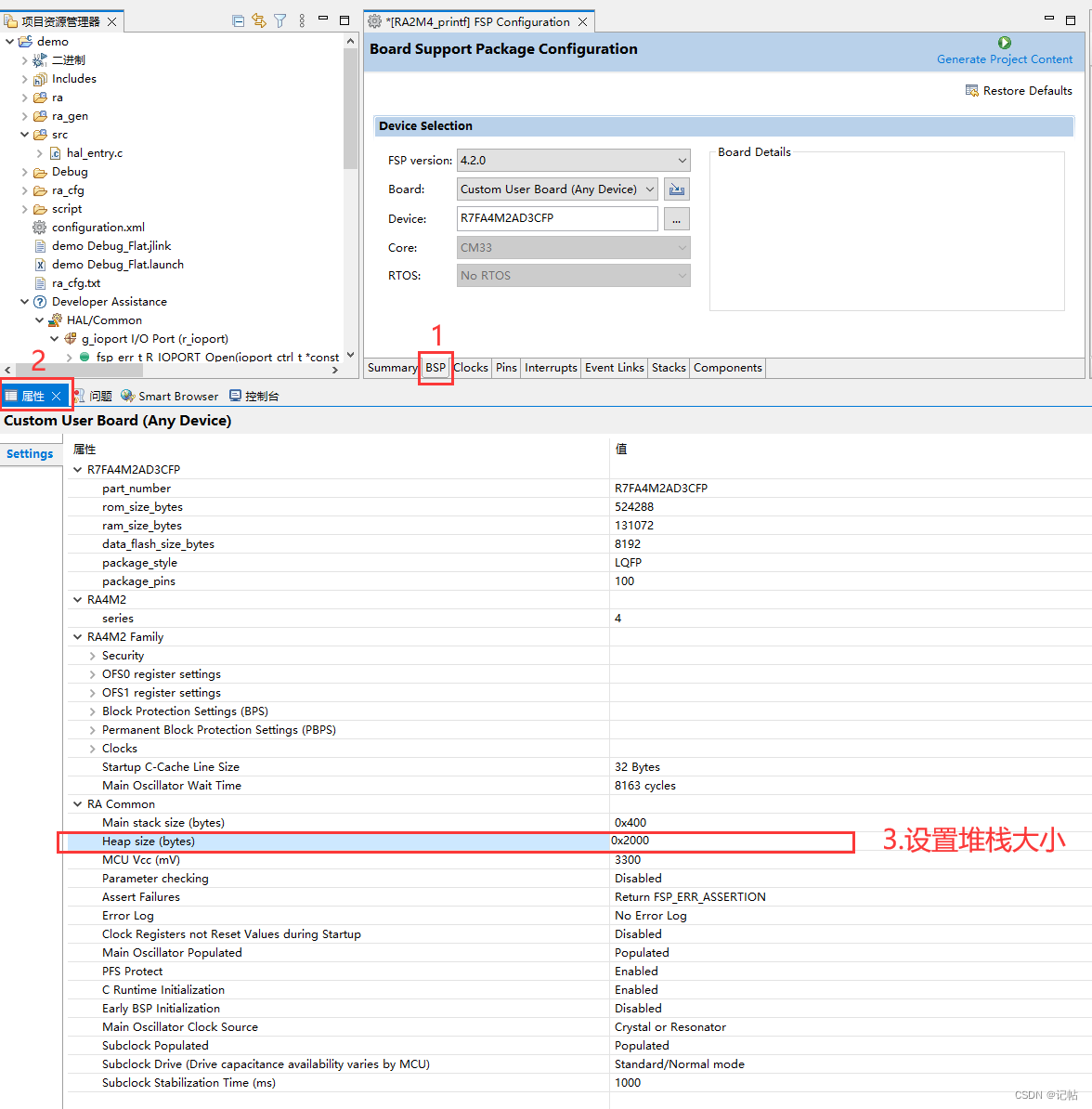
设置e2studio堆栈
printf函数通常需要设置堆栈大小。这是因为printf函数在运行时需要使用栈空间来存储临时变量和函数调用信息。如果堆栈大小不足,可能会导致程序崩溃或不可预期的行为。
printf函数使用了可变参数列表,它会在调用时使用栈来存储参数,在函数调用结束时再清除参数,这需要足够的栈空间。另外printf也会使用一些临时变量,如果栈空间不足,会导致程序崩溃。
因此,为了避免这类问题,应该根据程序的需求来合理设置堆栈大小。
e2studio的重定向printf设置
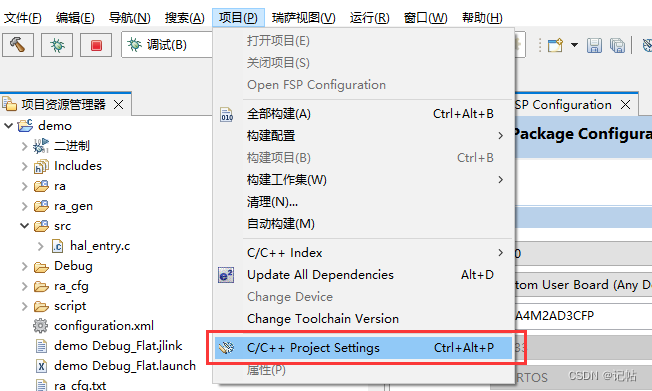
在嵌入式系统的开发中,尤其是在使用GNU编译器集合(GCC)时,–specs 参数用于指定链接时使用的系统规格(specs)文件。这些规格文件控制了编译器和链接器的行为,尤其是关于系统库和启动代码的链接。–specs=rdimon.specs 和 --specs=nosys.specs 是两种常见的规格文件,它们用于不同的场景。
–specs=rdimon.specs
用途: 这个选项用于链接“Redlib”库,这是为裸机(bare-metal)和半主机(semihosting)环境设计的C库的一个变体。半主机环境是一种特殊的运行模式,允许嵌入式程序通过宿主机(如开发PC)的调试器进行输入输出操作。
应用场景: 当你需要在没有完整操作系统的环境中运行程序,但同时需要使用调试器来处理输入输出(例如打印到宿主机的终端),这个选项非常有用。
特点: 它提供了一些基本的系统调用,通过调试接口与宿主机通信。
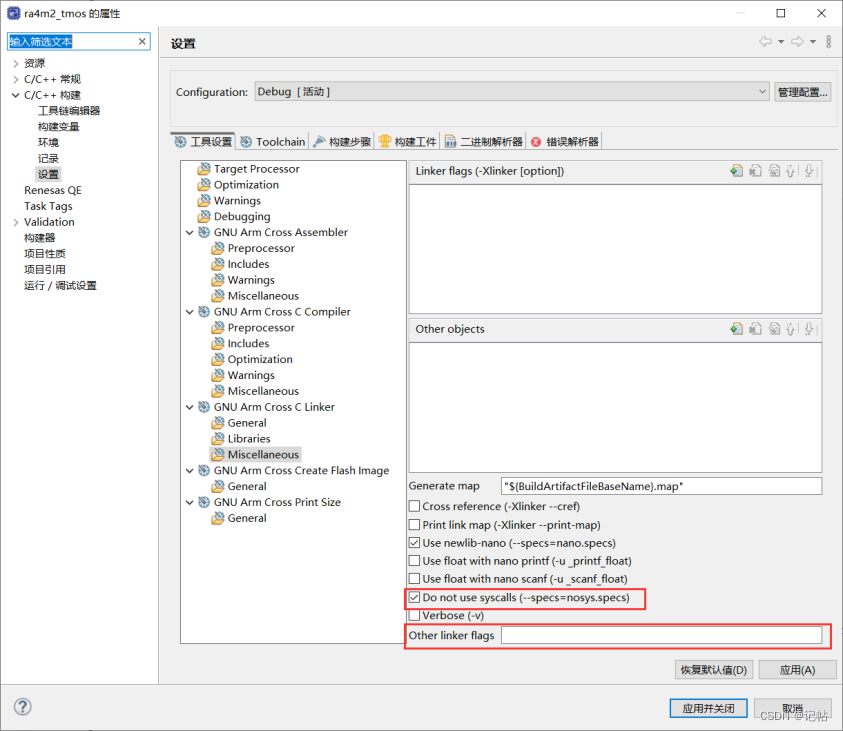
–specs=nosys.specs
用途: 这个选项链接了一个非常基本的系统库,这个库不提供任何系统服务的实现。
应用场景: 适用于完全的裸机程序,其中程序不执行任何操作系统调用,比如不进行文件操作或者系统级输入输出。
特点: 这是一个更“裸”的环境,没有任何操作系统支持。使用这个规格文件,程序不期望有操作系统层面的任何支持。
如果你的程序需要与宿主机进行交互(如在开发期间的调试),并且通过调试器进行基本的输入输出操作,则使用 --specs=rdimon.specs。
如果你的程序是完全独立的,不需要任何形式的操作系统服务,包括不进行任何系统级的输入输出,则使用 --specs=nosys.specs。
R_SCI_UART_Open()函数原型
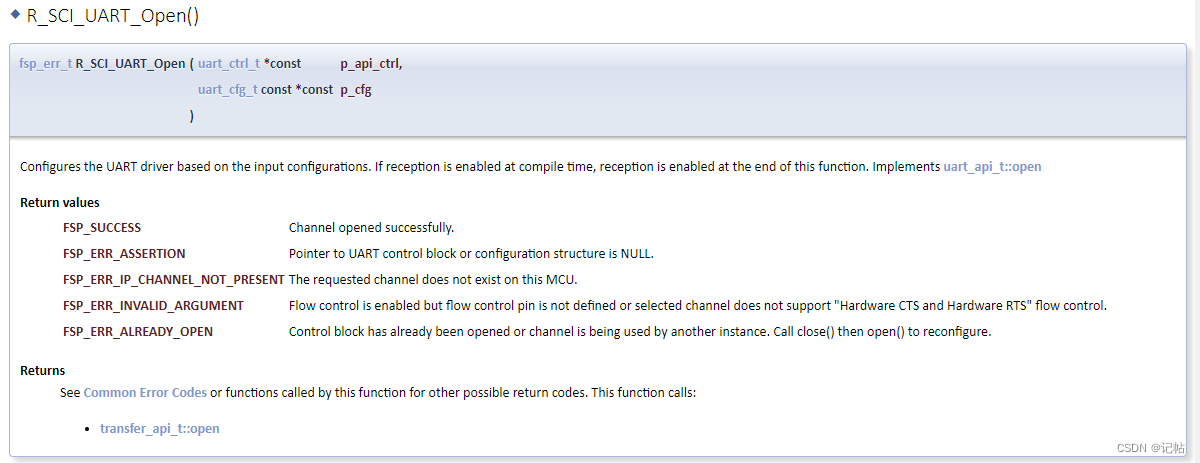
故可以用 R_SCI_UART_Open()函数进行配置,开启和初始化UART。
/* Open the transfer instance with initial configuration. */ err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg); assert(FSP_SUCCESS == err);
回调函数user_uart_callback ()
当数据发送的时候,可以查看UART_EVENT_TX_COMPLETE来判断是否发送完毕。
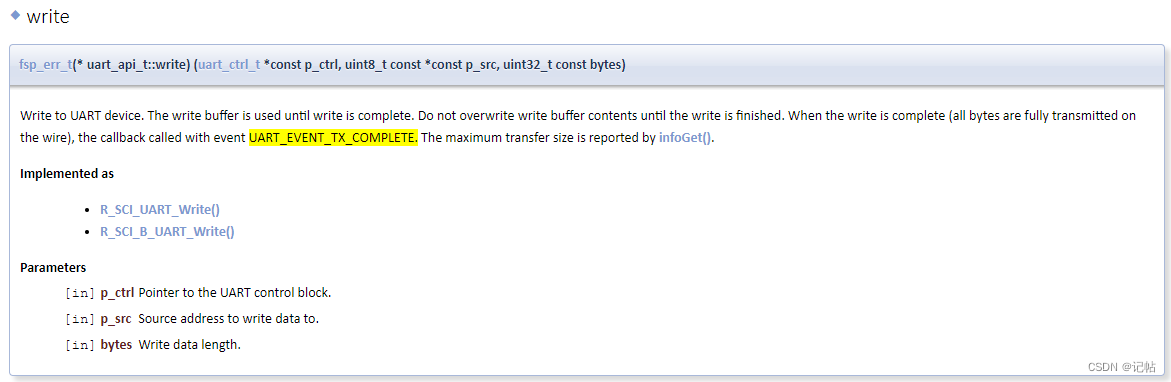
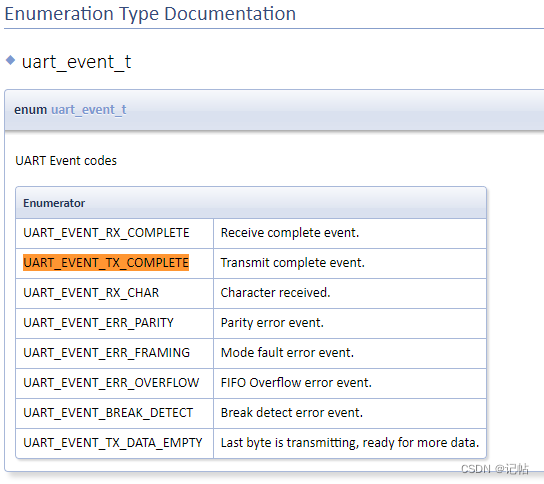
可以检查检查 "p_args" 结构体中的 "event" 字段的值是否等于 "UART_EVENT_TX_COMPLETE"。如果条件为真,那么 if 语句后面的代码块将会执行。
fsp_err_t err = FSP_SUCCESS; volatile bool uart_send_complete_flag = false; void user_uart_callback (uart_callback_args_t * p_args) { if(p_args- >event == UART_EVENT_TX_COMPLETE) { uart_send_complete_flag = true; } }
printf输出重定向到串口
打印最常用的方法是printf,所以要解决的问题是将printf的输出重定向到串口,然后通过串口将数据发送出去。 注意一定要加上头文件#include
#ifdef __GNUC__ //串口重定向 #define PUTCHAR_PROTOTYPE int __io_putchar(int ch) #else #define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f) #endif PUTCHAR_PROTOTYPE { err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1); if(FSP_SUCCESS != err) __BKPT(); while(uart_send_complete_flag == false){} uart_send_complete_flag = false; return ch; } int _write(int fd,char *pBuffer,int size) { for(int i=0;i< size;i++) { __io_putchar(*pBuffer++); } return size; }
通信模式
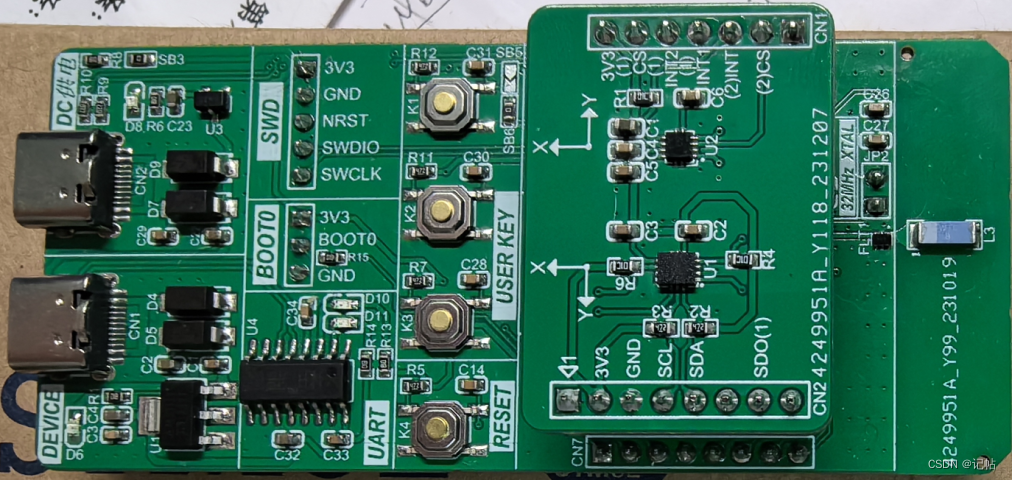
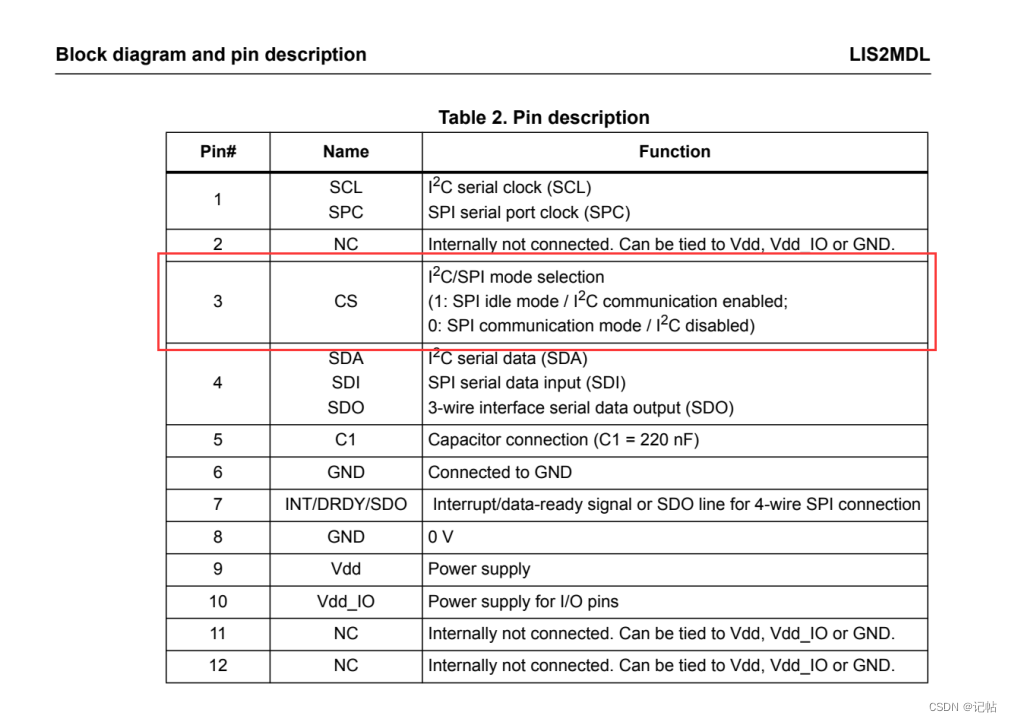
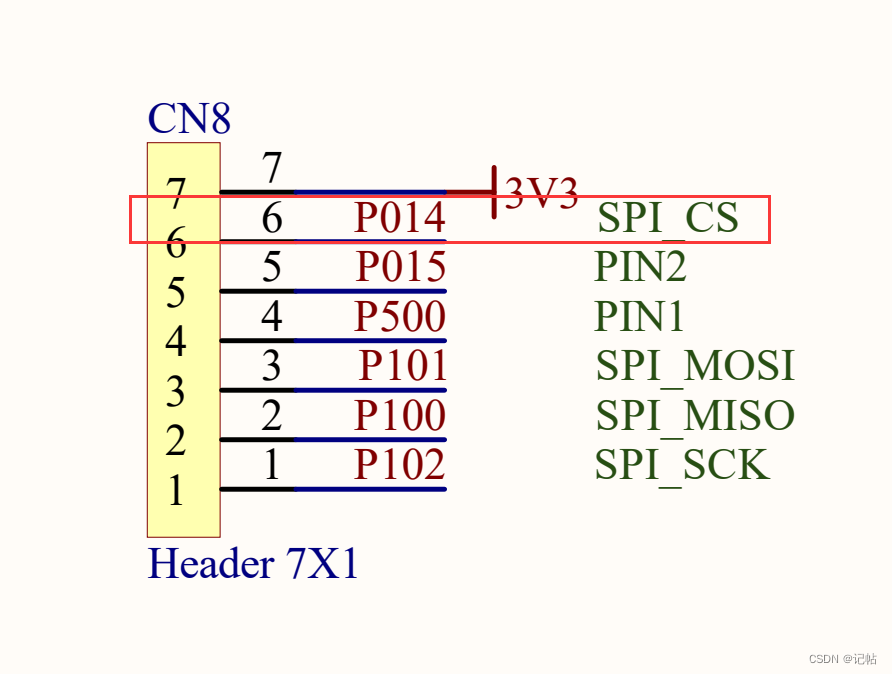
对于LIS2MDL,可以使用SPI或者IIC进行通讯。 最小系统图如下所示。
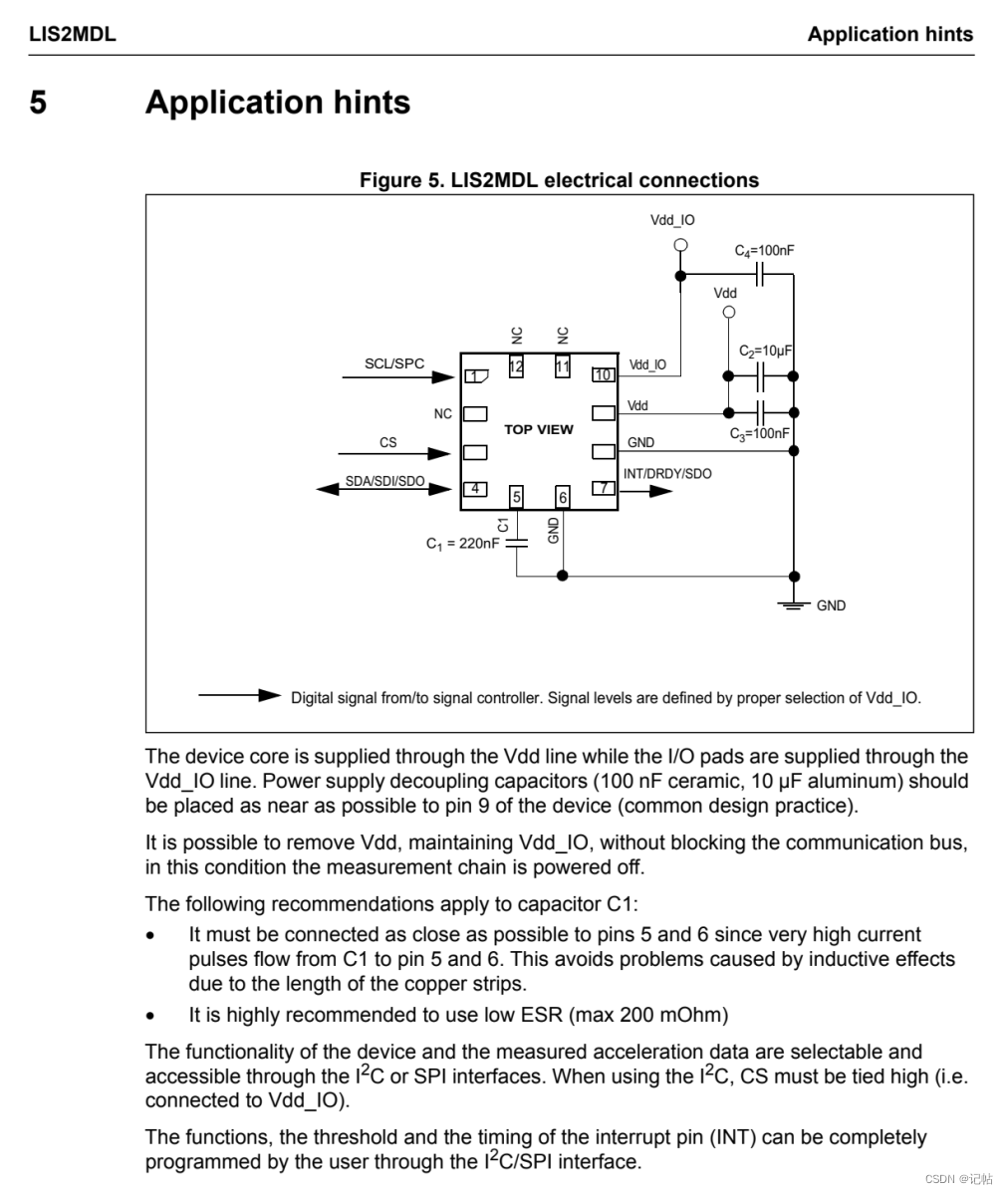
在CS管脚为1的时候,为IIC模式
本文使用的板子原理图如下所示。
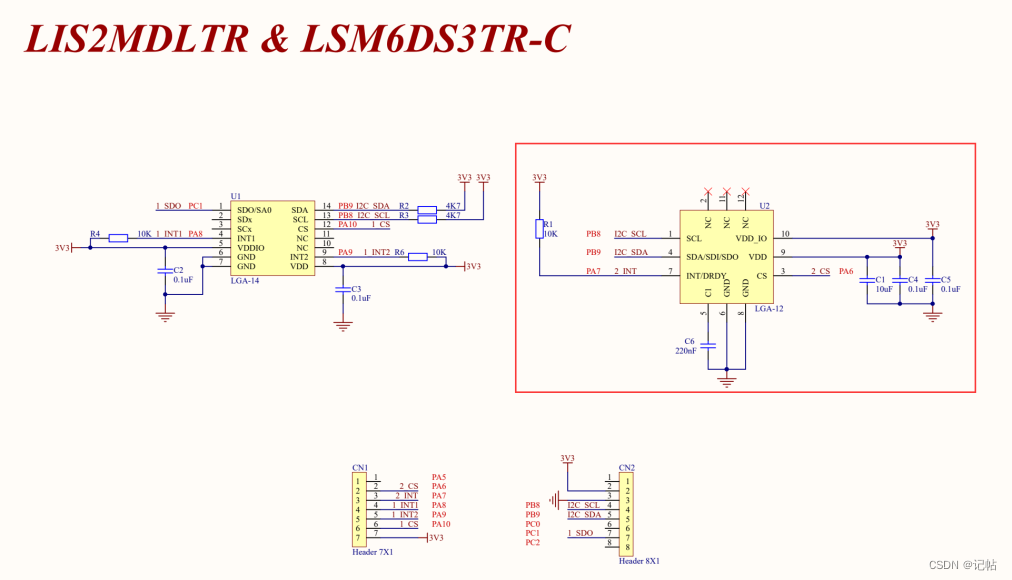
CS对应到RA4M2板子上的端口为P014。
配置为输出管脚。
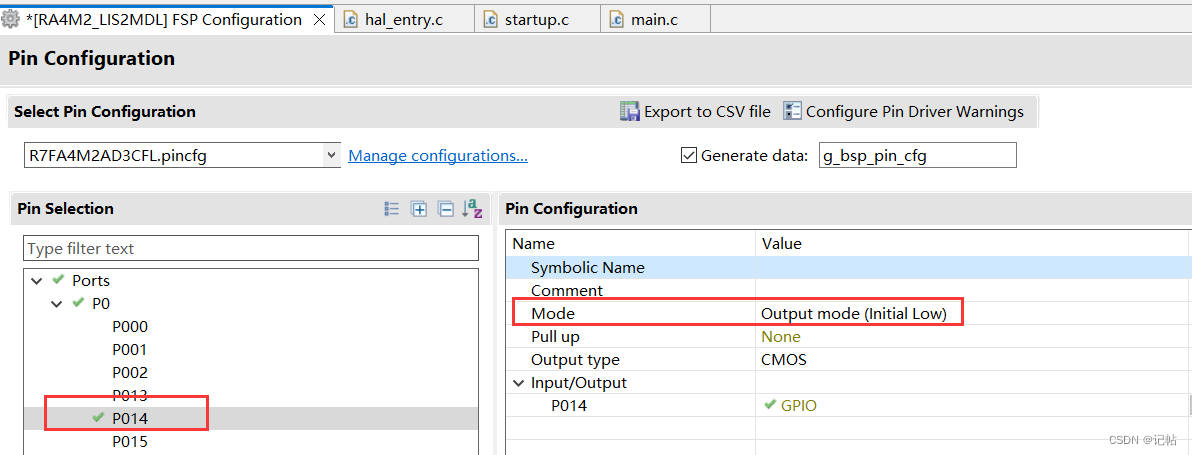
R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_00_PIN_14, BSP_IO_LEVEL_HIGH);
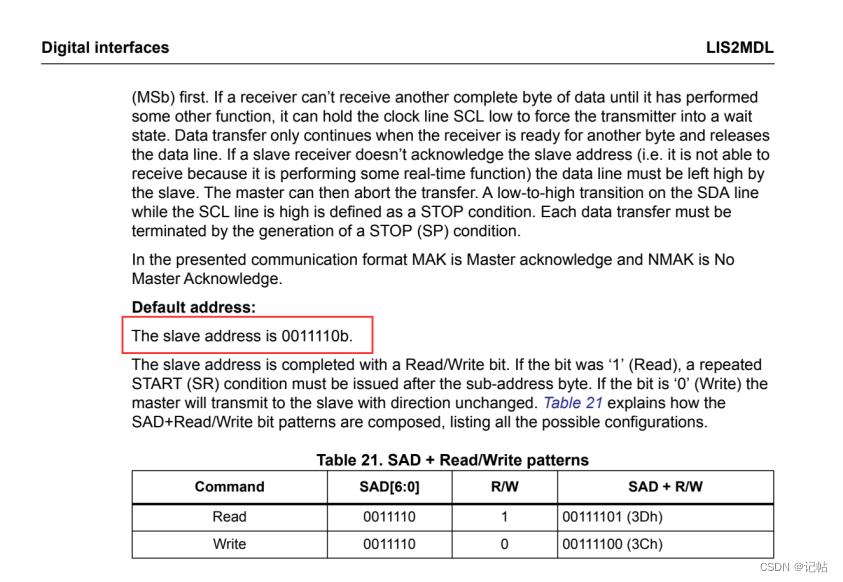
IIC属性配置
查看手册,可以得知LIS2MDL的IIC地址为“0011110” ,即0x1E
IIC配置
配置RA4M2的I2C接口,使其作为I2C master进行通信。 查看开发板原理图,对应的IIC为P407和P408。
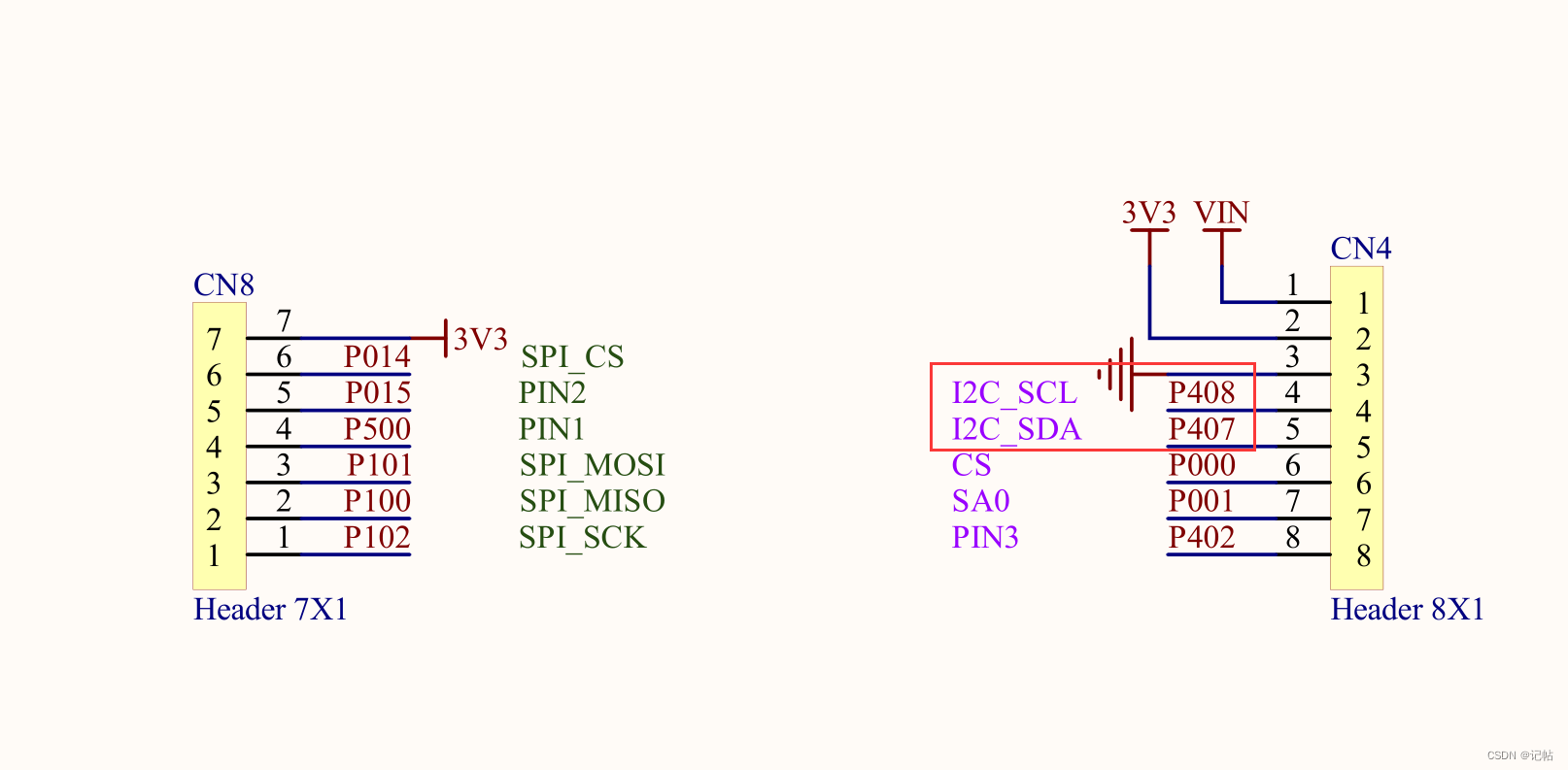
点击Stacks->New Stack->Connectivity -> I2C Master(r_iic_master)。
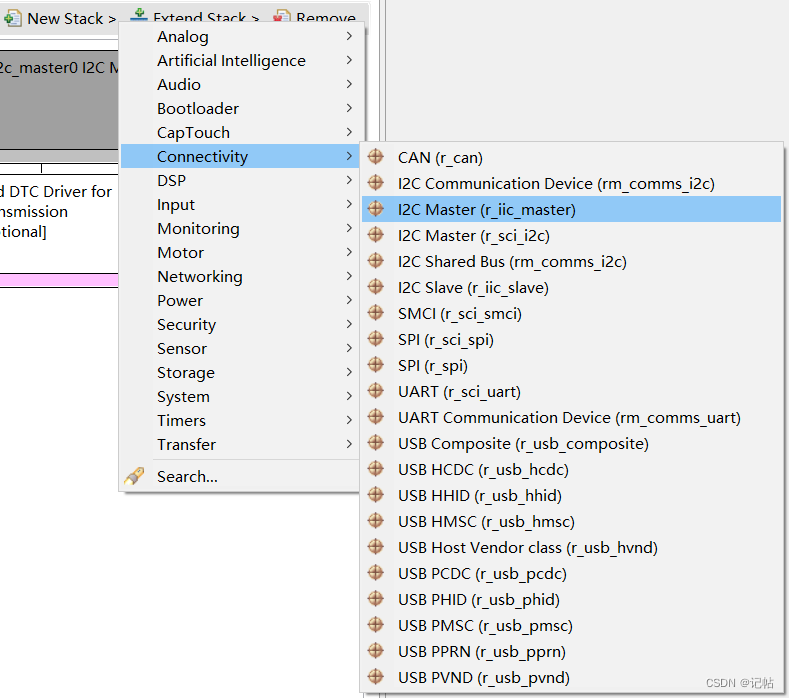
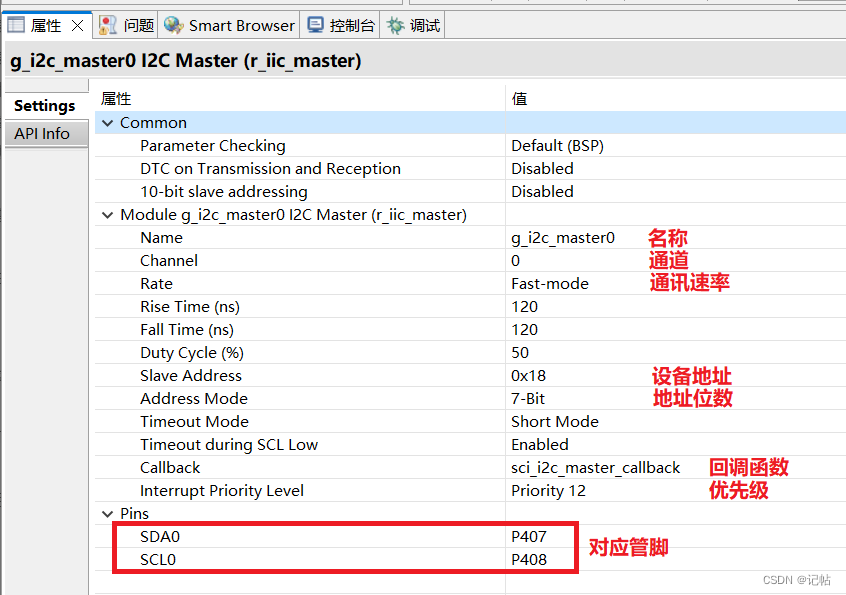
设置IIC的配置,需要注意从机的地址。
R_IIC_MASTER_Open()函数原型
R_IIC_MASTER_Open()函数为执行IIC初始化,开启配置如下所示。
/* Initialize the I2C module */ err = R_IIC_MASTER_Open(&g_i2c_master0_ctrl, &g_i2c_master0_cfg); /* Handle any errors. This function should be defined by the user. */ assert(FSP_SUCCESS == err);
R_IIC_MASTER_Write()函数原型
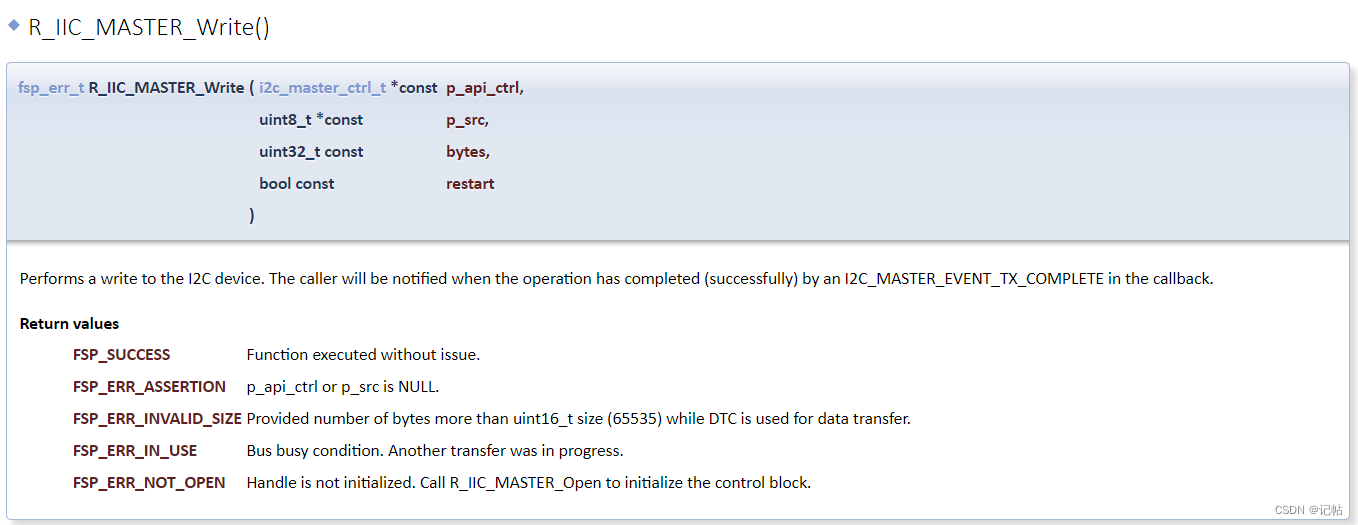
R_IIC_MASTER_Write()函数是向IIC设备中写入数据,写入格式如下所示。
err = R_IIC_MASTER_Write(&g_i2c_master0_ctrl, ®, 1, true); assert(FSP_SUCCESS == err);
R_IIC_MASTER_Read()函数原型
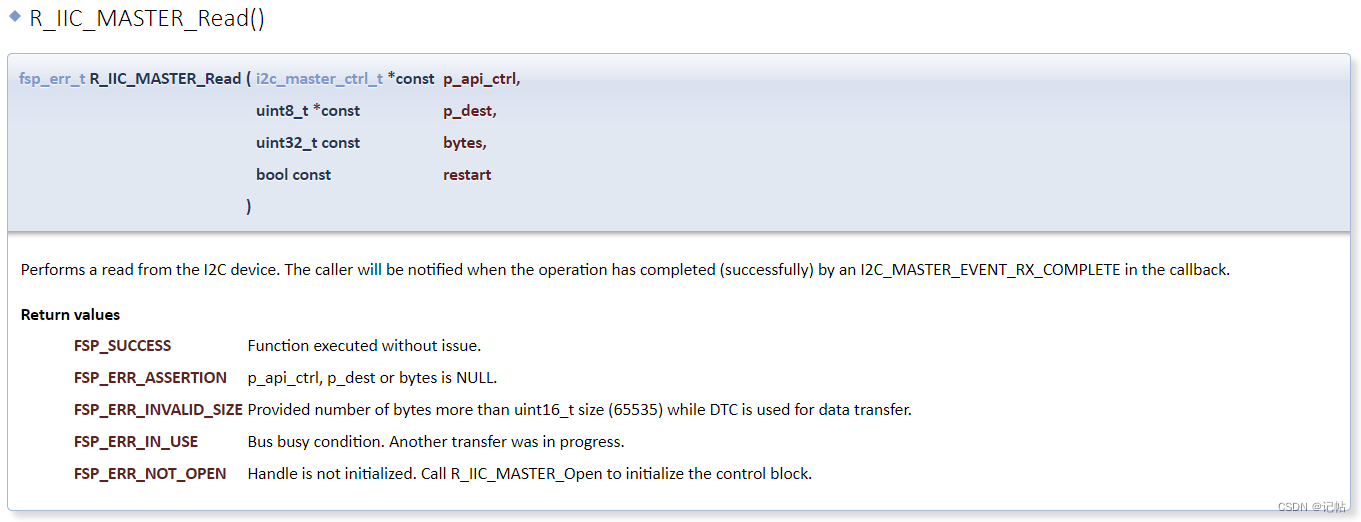
R_SCI_I2C_Read()函数是向IIC设备中读取数据,读取格式如下所示。
/* Read data from I2C slave */ err = R_IIC_MASTER_Read(&g_i2c_master0_ctrl, bufp, len, false); assert(FSP_SUCCESS == err);
sci_i2c_master_callback()回调函数
对于数据是否发送完毕,可以查看是否获取到I2C_MASTER_EVENT_TX_COMPLETE字段。
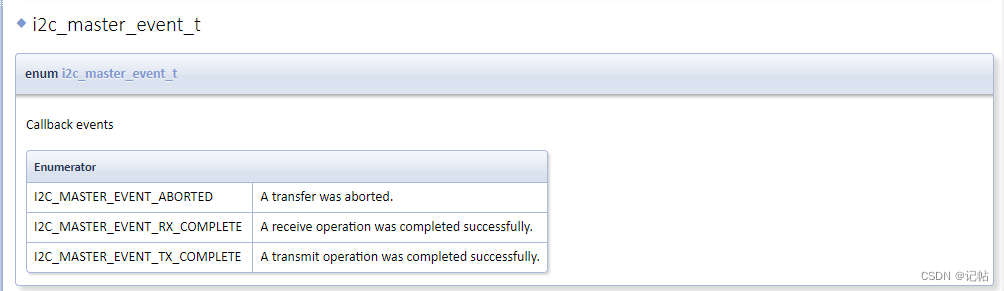
/* Callback function */ i2c_master_event_t i2c_event = I2C_MASTER_EVENT_ABORTED; uint32_t timeout_ms = 100000; void sci_i2c_master_callback(i2c_master_callback_args_t *p_args) { i2c_event = I2C_MASTER_EVENT_ABORTED; if (NULL != p_args) { /* capture callback event for validating the i2c transfer event*/ i2c_event = p_args- >event; } }
参考程序
https://github.com/STMicroelectronics/lis2mdl-pid
初始换管脚
使能CS为高电平,配置为IIC模式。
R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_00_PIN_14, BSP_IO_LEVEL_HIGH); /* Initialize the I2C module */ err = R_IIC_MASTER_Open(&g_i2c_master0_ctrl, &g_i2c_master0_cfg); /* Handle any errors. This function should be defined by the user. */ assert(FSP_SUCCESS == err); /* Initialize mems driver interface */ stmdev_ctx_t dev_ctx; dev_ctx.write_reg = platform_write; dev_ctx.read_reg = platform_read; dev_ctx.handle = &SENSOR_BUS; /* Wait sensor boot time */ platform_delay(BOOT_TIME);
获取ID
可以向WHO_AM_I (4Fh)获取固定值,判断是否为0x40
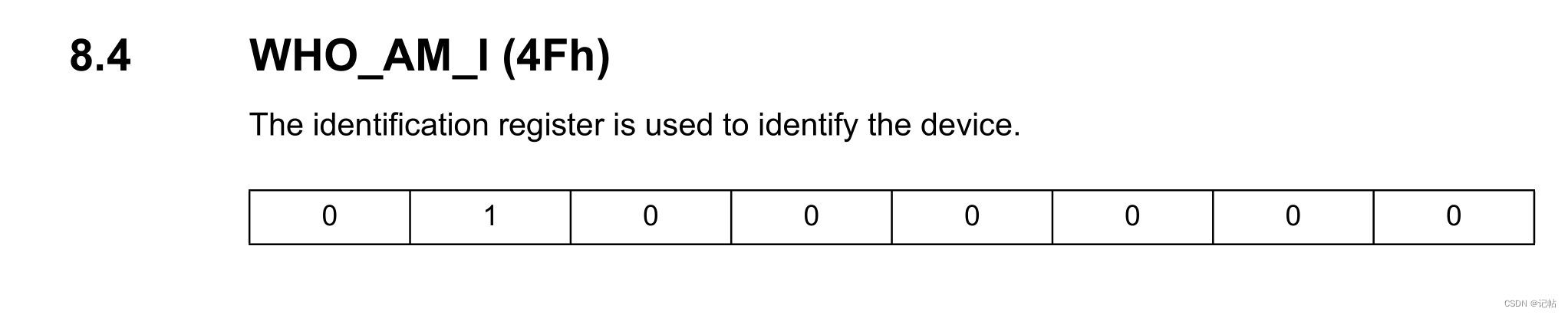
is2mdl_device_id_get为获取函数。
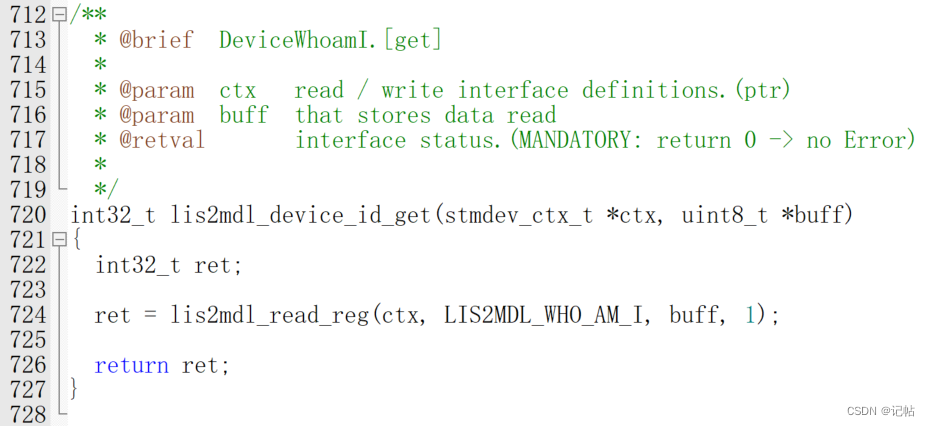
对应的获取ID驱动程序,如下所示。
/* Wait sensor boot time */ platform_delay(BOOT_TIME); /* Check device ID */ lis2mdl_device_id_get(&dev_ctx, &whoamI); printf("LIS2MDL_ID=0x%x,whoamI=0x%xn",LIS2MDL_ID,whoamI); if (whoamI != LIS2MDL_ID) while (1) { /* manage here device not found */ }
复位操作
可以向CFG_REG_A (60h)的SOFT_RST寄存器写入1进行复位。
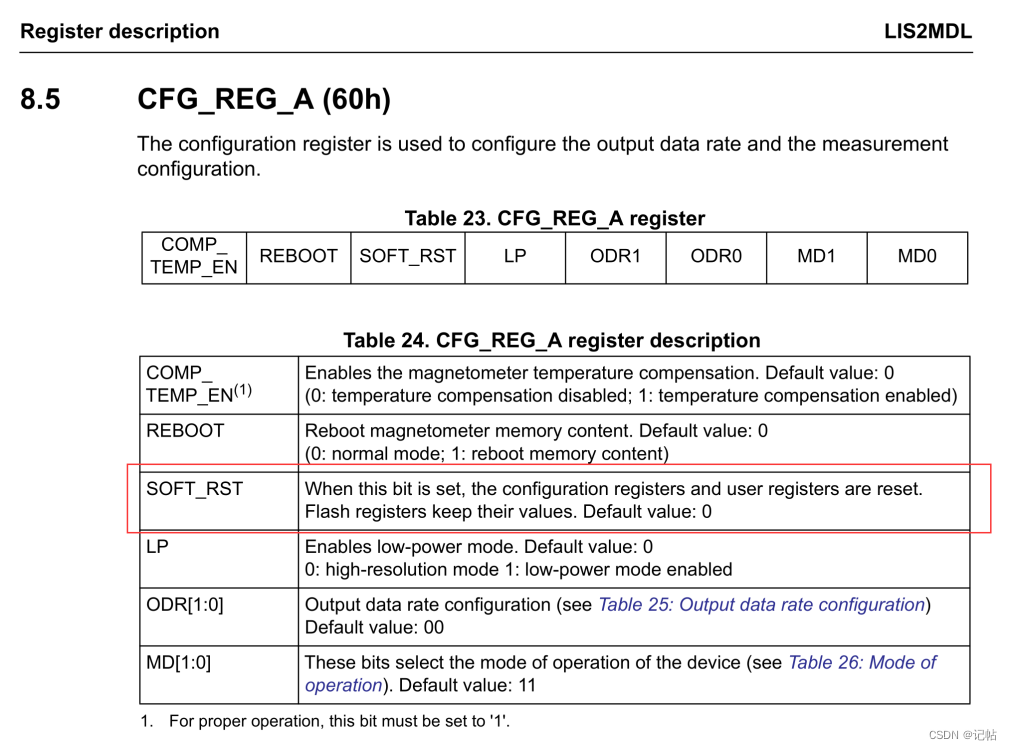
lis2mdl_reset_set为重置函数。
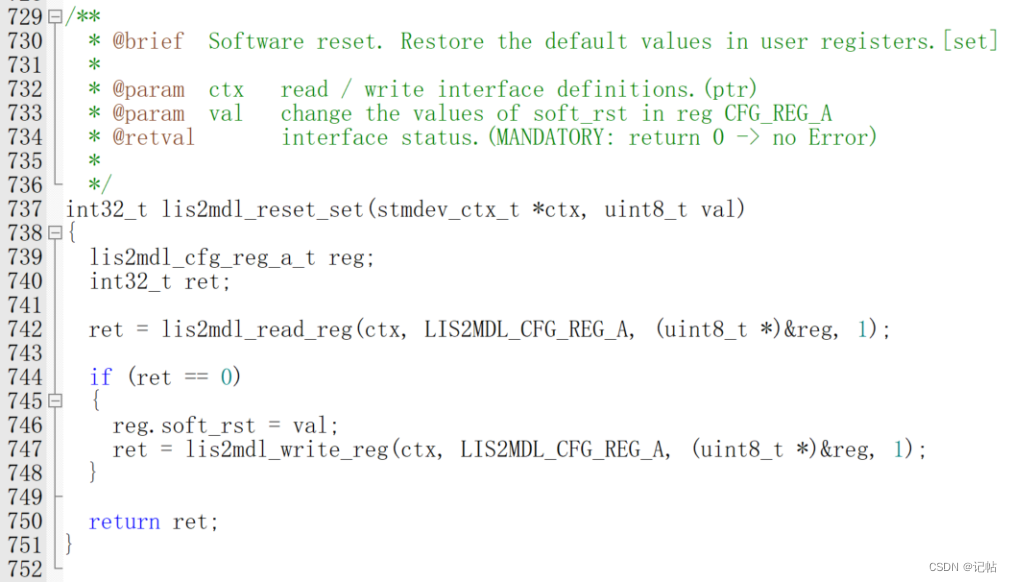
对应的驱动程序,如下所示。
/* Restore default configuration */ lis2mdl_reset_set(&dev_ctx, PROPERTY_ENABLE); do { lis2mdl_reset_get(&dev_ctx, &rst); } while (rst);
BDU设置
在很多传感器中,数据通常被存储在输出寄存器中,这些寄存器分为两部分:MSB和LSB。这两部分共同表示一个完整的数据值。例如,在一个加速度计中,MSB和LSB可能共同表示一个加速度的测量值。
连续更新模式(BDU = ‘0’):在默认模式下,输出寄存器的值会持续不断地被更新。这意味着在你读取MSB和LSB的时候,寄存器中的数据可能会因为新的测量数据而更新。这可能导致一个问题:当你读取MSB时,如果寄存器更新了,接下来读取的LSB可能就是新的测量值的一部分,而不是与MSB相对应的值。这样,你得到的就是一个“拼凑”的数据,它可能无法准确代表任何实际的测量时刻。
块数据更新(BDU)模式(BDU = ‘1’):当激活BDU功能时,输出寄存器中的内容不会在读取MSB和LSB之间更新。这就意味着一旦开始读取数据(无论是先读MSB还是LSB),寄存器中的那一组数据就被“锁定”,直到两部分都被读取完毕。这样可以确保你读取的MSB和LSB是同一测量时刻的数据,避免了读取到代表不同采样时刻的数据。
简而言之,BDU位的作用是确保在读取数据时,输出寄存器的内容保持稳定,从而避免读取到拼凑或错误的数据。这对于需要高精度和稳定性的应用尤为重要。
可以向CTRL3 (12h)的BDU寄存器写入1进行开启。
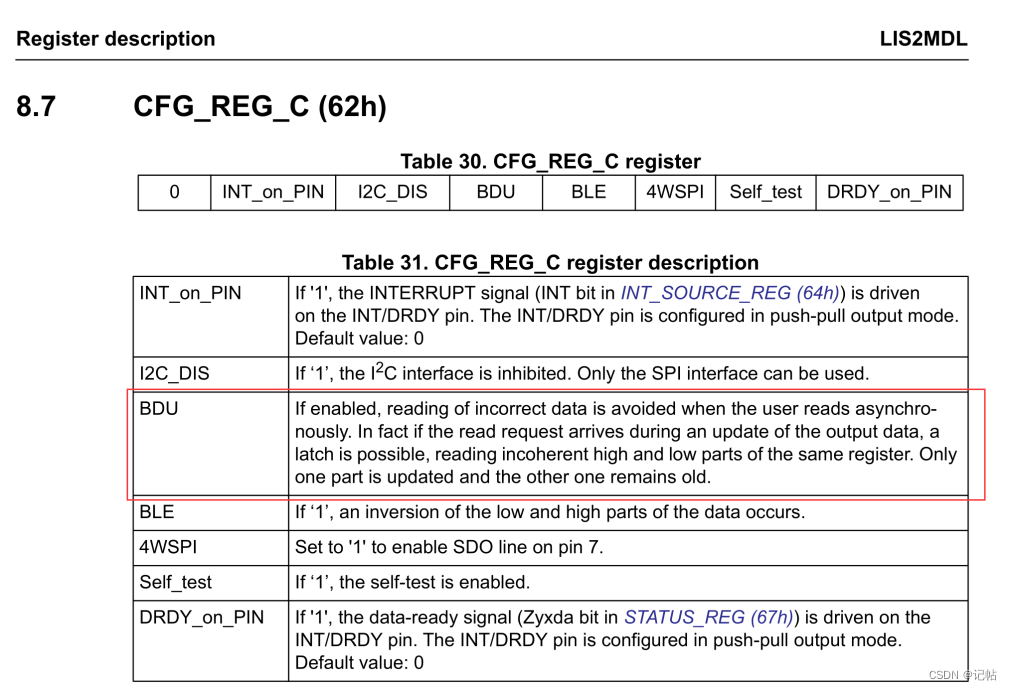
对应的驱动程序,如下所示。
/* Enable Block Data Update */ lis2mdl_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
设置速率
速率可以通过CFG_REG_A (60h)的ODR设置速率。
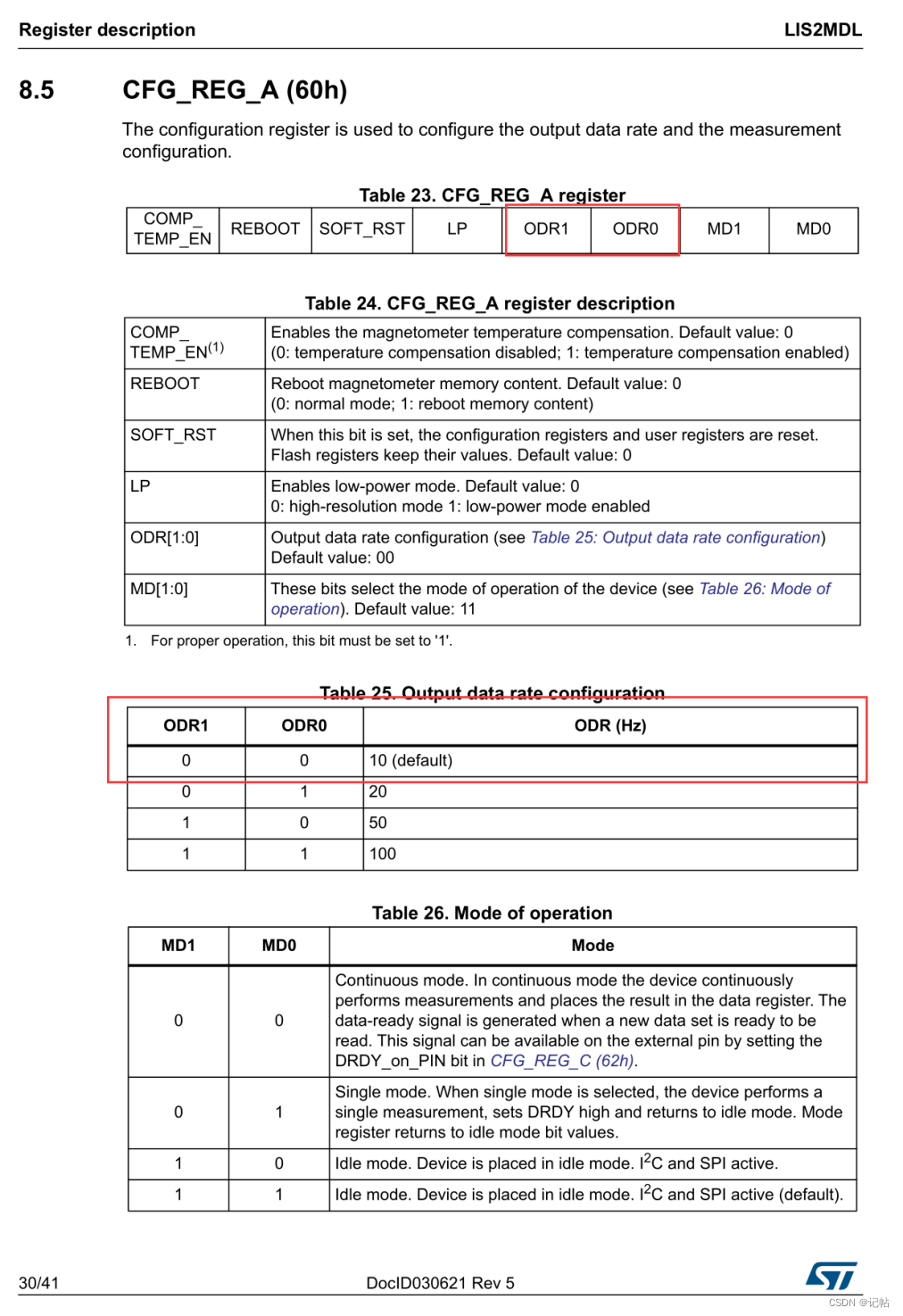
设置速率可以使用如下函数。
/* Set Output Data Rate */ lis2mdl_data_rate_set(&dev_ctx, LIS2MDL_ODR_10Hz);
启用偏移消除
LIS2MDL 磁力计的配置寄存器(CFG_REG_B)的OFF_CANC - 这个位用于启用或禁用偏移消除。
这意味着每次磁力计准备输出新的测量数据时,它都会自动进行偏移校准,以确保数据的准确性。这通常用于校准传感器,以消除由于传感器偏移或环境因素引起的任何误差。
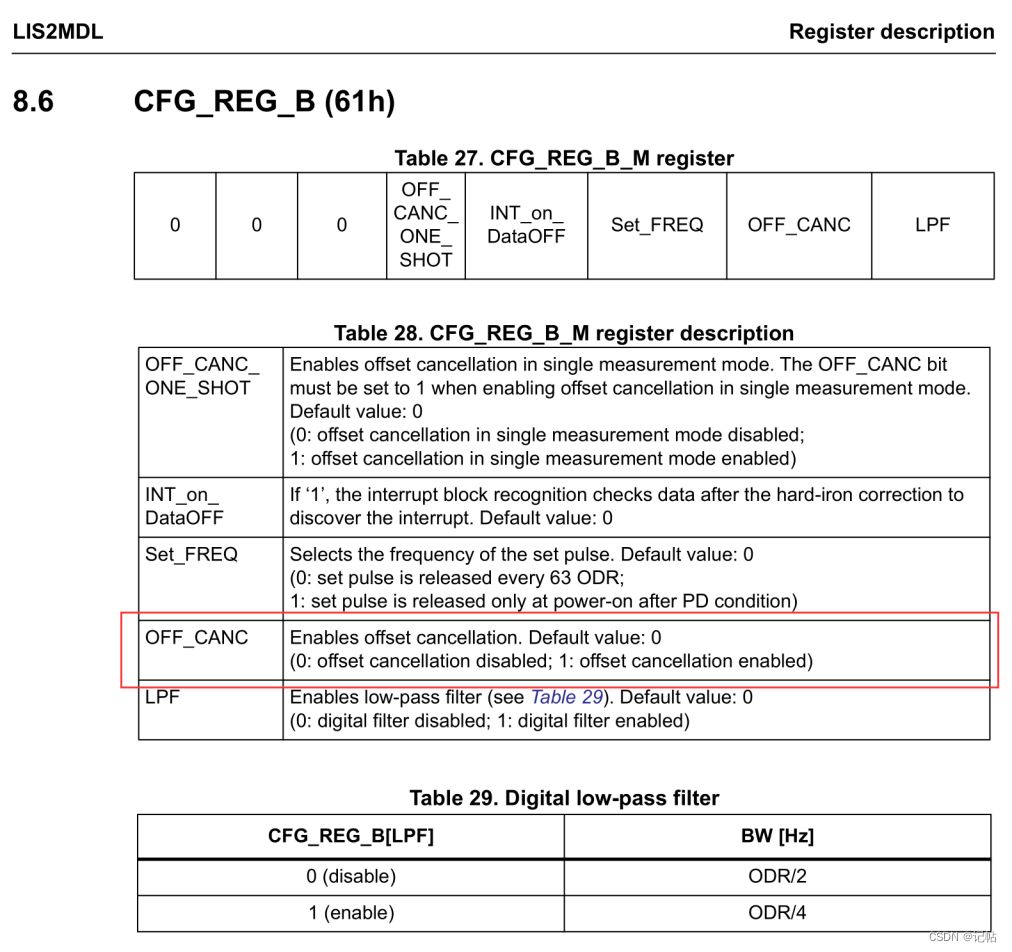
/* Set / Reset sensor mode */ lis2mdl_set_rst_mode_set(&dev_ctx, LIS2MDL_SENS_OFF_CANC_EVERY_ODR);
开启温度补偿
开启温度补偿可以通过CFG_REG_A (60h)的COMP_TEMP_EN进行配置。
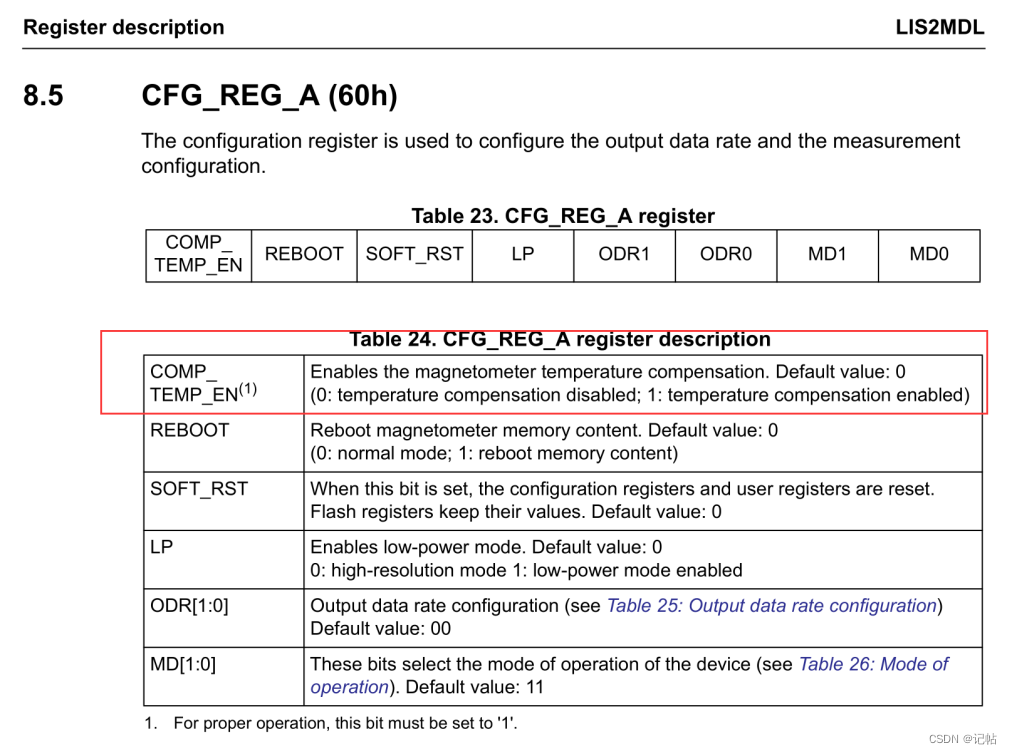
/* Enable temperature compensation */ lis2mdl_offset_temp_comp_set(&dev_ctx, PROPERTY_ENABLE);
设置为连续模式
LIS2MDL 磁力计 CFG_REG_A (60h) 配置寄存器的MD1 和 MD0 - 这两个位用于选择设备的工作模式。
00 - 连续模式,设备连续进行测量并将结果放在数据寄存器中。
01 - 单次模式,设备进行单次测量,然后返回到空闲模式。
10 和 11 - 空闲模式,设备被置于空闲模式,但I2C和SPI接口仍然激活
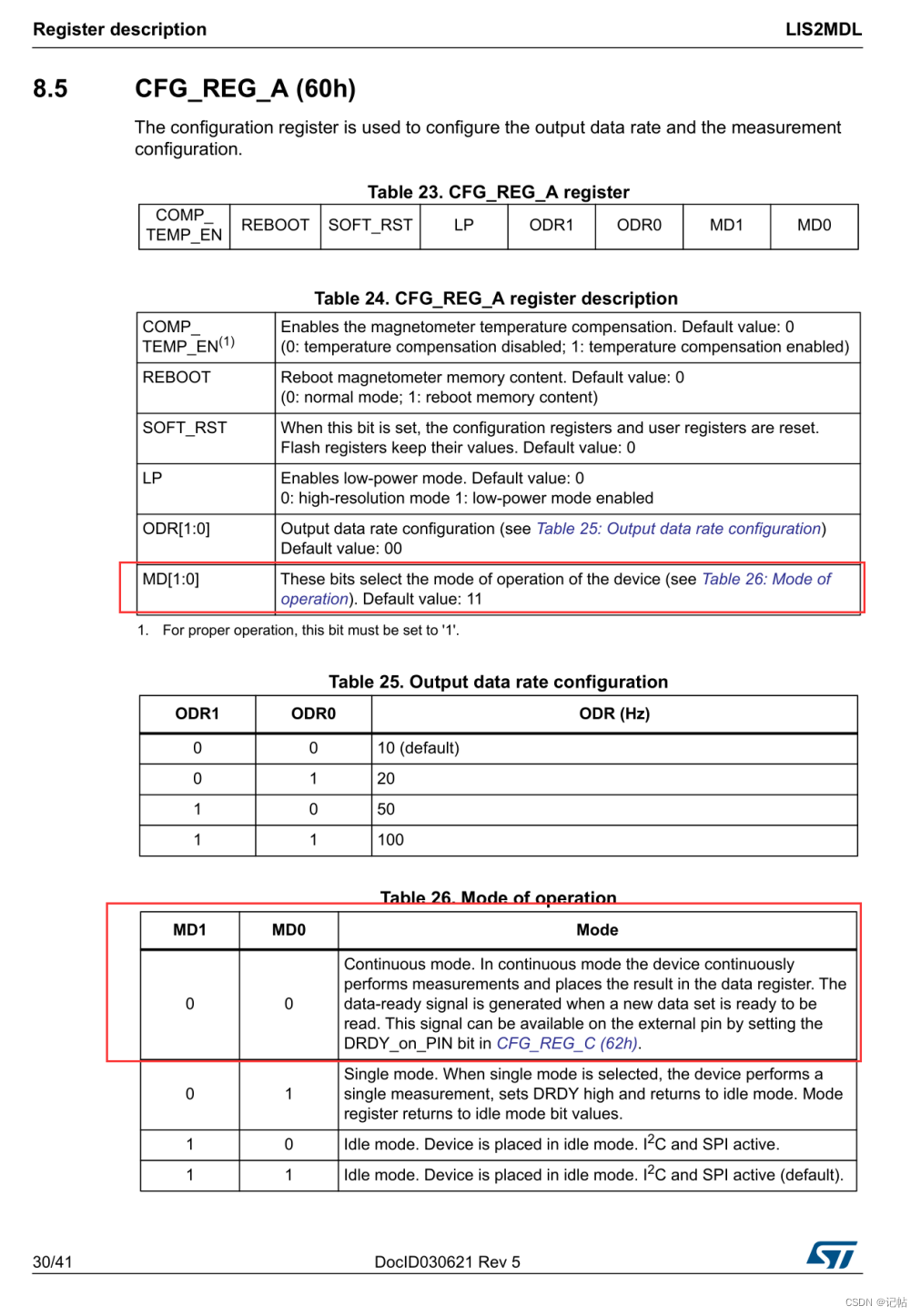
/* Set device in continuous mode */ lis2mdl_operating_mode_set(&dev_ctx, LIS2MDL_CONTINUOUS_MODE);
轮询读取数据
对于数据是否准备好,可以查看STATUS_REG (67h)的Zyxda位,判断是否有新数据到达。
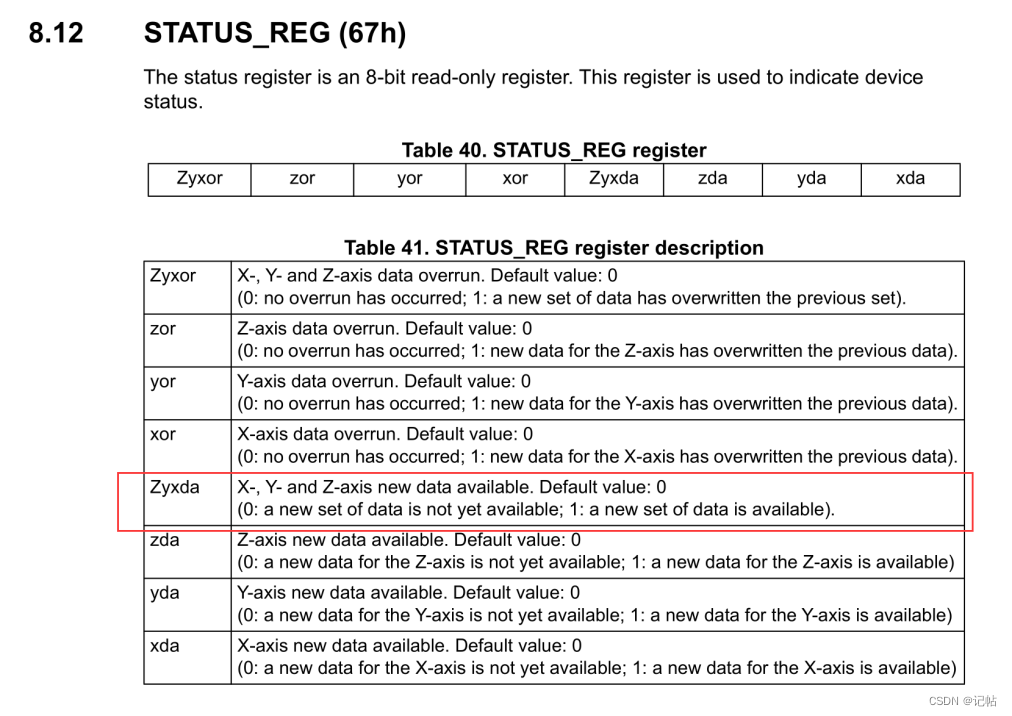
uint8_t reg; /* Read output only if new value is available */ lis2mdl_mag_data_ready_get(&dev_ctx, ®);
数据OUTX_L_REG(68h)-OUTZ_H_REG(6Dh)获取。
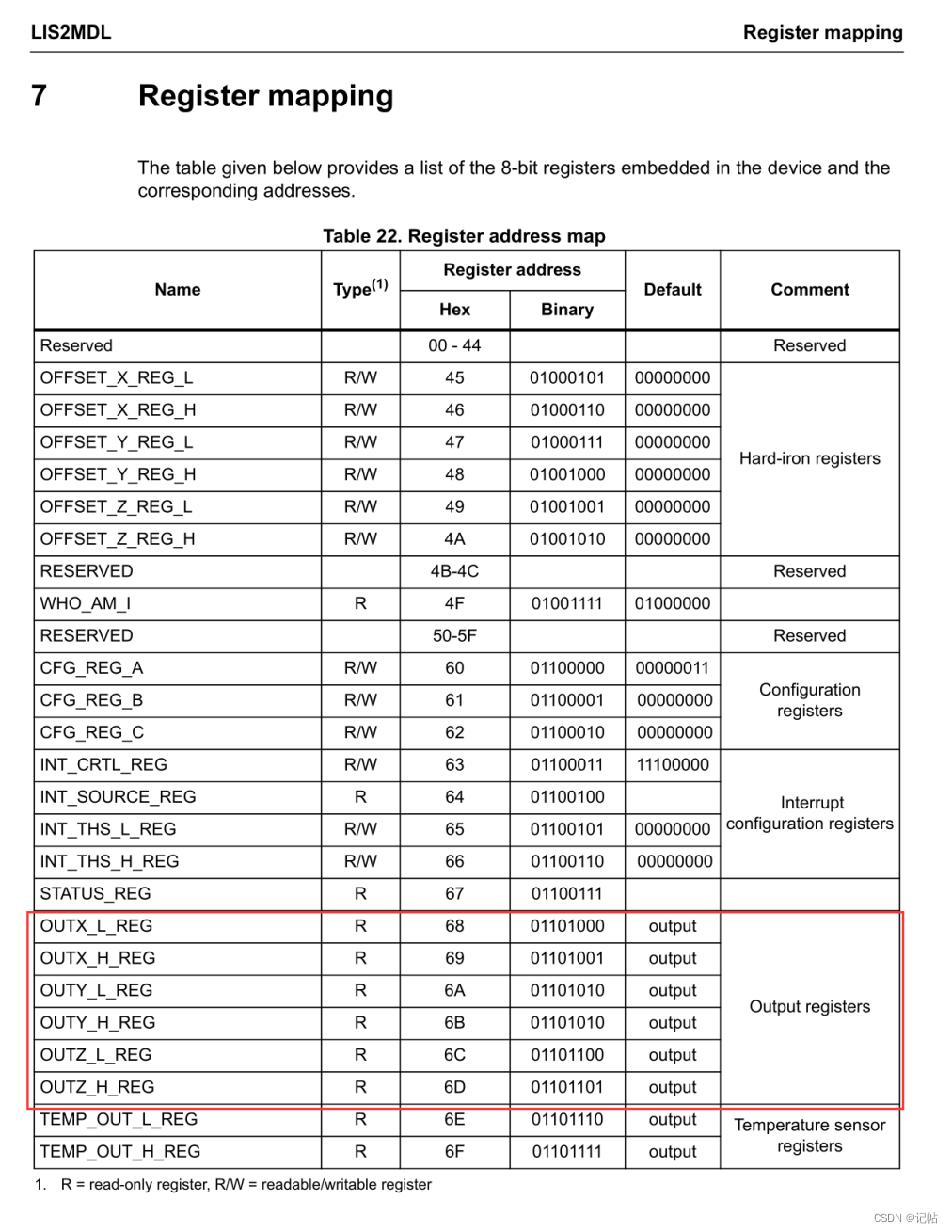
/* Read magnetic field data */ memset(data_raw_magnetic, 0x00, 3 * sizeof(int16_t)); lis2mdl_magnetic_raw_get(&dev_ctx, data_raw_magnetic); magnetic_mG[0] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[0]); magnetic_mG[1] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[1]); magnetic_mG[2] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[2]);
主程序
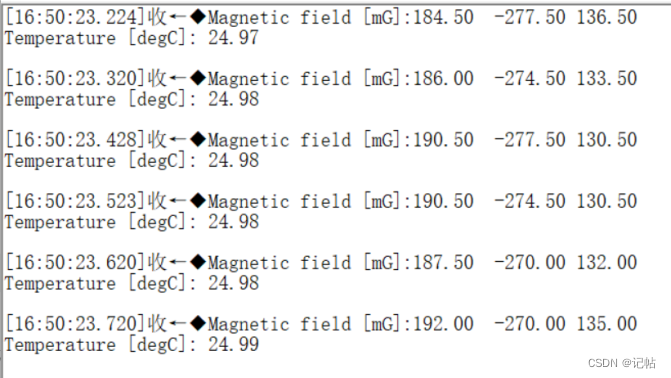
#include "hal_data.h" #include < stdio.h > #include "lis2mdl_reg.h" fsp_err_t err = FSP_SUCCESS; volatile bool uart_send_complete_flag = false; void user_uart_callback (uart_callback_args_t * p_args) { if(p_args- >event == UART_EVENT_TX_COMPLETE) { uart_send_complete_flag = true; } } /* Callback function */ i2c_master_event_t i2c_event = I2C_MASTER_EVENT_ABORTED; uint32_t timeout_ms = 100000; void sci_i2c_master_callback(i2c_master_callback_args_t *p_args) { i2c_event = I2C_MASTER_EVENT_ABORTED; if (NULL != p_args) { /* capture callback event for validating the i2c transfer event*/ i2c_event = p_args- >event; } } #ifdef __GNUC__ //串口重定向 #define PUTCHAR_PROTOTYPE int __io_putchar(int ch) #else #define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f) #endif PUTCHAR_PROTOTYPE { err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1); if(FSP_SUCCESS != err) __BKPT(); while(uart_send_complete_flag == false){} uart_send_complete_flag = false; return ch; } int _write(int fd,char *pBuffer,int size) { for(int i=0;i< size;i++) { __io_putchar(*pBuffer++); } return size; } FSP_CPP_HEADER void R_BSP_WarmStart(bsp_warm_start_event_t event); FSP_CPP_FOOTER #define SENSOR_BUS g_i2c_master0_ctrl /* Private macro -------------------------------------------------------------*/ #define BOOT_TIME 20 //ms /* Private variables ---------------------------------------------------------*/ static int16_t data_raw_magnetic[3]; static int16_t data_raw_temperature; static float magnetic_mG[3]; static float temperature_degC; static uint8_t whoamI, rst; static uint8_t tx_buffer[1000]; /* Extern variables ----------------------------------------------------------*/ /* Private functions ---------------------------------------------------------*/ /* * WARNING: * Functions declare in this section are defined at the end of this file * and are strictly related to the hardware platform used. * */ static int32_t platform_write(void *handle, uint8_t reg, const uint8_t *bufp, uint16_t len); static int32_t platform_read(void *handle, uint8_t reg, uint8_t *bufp, uint16_t len); static void tx_com(uint8_t *tx_buffer, uint16_t len); static void platform_delay(uint32_t ms); static void platform_init(void); /*******************************************************************************************************************//** * main() is generated by the RA Configuration editor and is used to generate threads if an RTOS is used. This function * is called by main() when no RTOS is used. **********************************************************************************************************************/ void hal_entry(void) { /* TODO: add your own code here */ /* Open the transfer instance with initial configuration. */ err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg); assert(FSP_SUCCESS == err); printf("hello world!n"); R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_00_PIN_14, BSP_IO_LEVEL_HIGH); /* Initialize the I2C module */ err = R_IIC_MASTER_Open(&g_i2c_master0_ctrl, &g_i2c_master0_cfg); /* Handle any errors. This function should be defined by the user. */ assert(FSP_SUCCESS == err); /* Initialize mems driver interface */ stmdev_ctx_t dev_ctx; dev_ctx.write_reg = platform_write; dev_ctx.read_reg = platform_read; dev_ctx.handle = &SENSOR_BUS; /* Wait sensor boot time */ platform_delay(BOOT_TIME); /* Check device ID */ lis2mdl_device_id_get(&dev_ctx, &whoamI); printf("LIS2MDL_ID=0x%x,whoamI=0x%xn",LIS2MDL_ID,whoamI); if (whoamI != LIS2MDL_ID) while (1) { /* manage here device not found */ } /* Restore default configuration */ lis2mdl_reset_set(&dev_ctx, PROPERTY_ENABLE); do { lis2mdl_reset_get(&dev_ctx, &rst); } while (rst); /* Enable Block Data Update */ lis2mdl_block_data_update_set(&dev_ctx, PROPERTY_ENABLE); /* Set Output Data Rate */ lis2mdl_data_rate_set(&dev_ctx, LIS2MDL_ODR_10Hz); /* Set / Reset sensor mode */ lis2mdl_set_rst_mode_set(&dev_ctx, LIS2MDL_SENS_OFF_CANC_EVERY_ODR); /* Enable temperature compensation */ lis2mdl_offset_temp_comp_set(&dev_ctx, PROPERTY_ENABLE); /* Set device in continuous mode */ lis2mdl_operating_mode_set(&dev_ctx, LIS2MDL_CONTINUOUS_MODE); while (1) { uint8_t reg; /* Read output only if new value is available */ lis2mdl_mag_data_ready_get(&dev_ctx, ®); if (reg) { /* Read magnetic field data */ memset(data_raw_magnetic, 0x00, 3 * sizeof(int16_t)); lis2mdl_magnetic_raw_get(&dev_ctx, data_raw_magnetic); magnetic_mG[0] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[0]); magnetic_mG[1] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[1]); magnetic_mG[2] = lis2mdl_from_lsb_to_mgauss(data_raw_magnetic[2]); printf("Magnetic field [mG]:%4.2ft%4.2ft%4.2frn",magnetic_mG[0], magnetic_mG[1], magnetic_mG[2]); /* Read temperature data */ memset(&data_raw_temperature, 0x00, sizeof(int16_t)); lis2mdl_temperature_raw_get(&dev_ctx, &data_raw_temperature); temperature_degC = lis2mdl_from_lsb_to_celsius(data_raw_temperature); printf("Temperature [degC]:%6.2frn",temperature_degC); } R_BSP_SoftwareDelay(10, BSP_DELAY_UNITS_MILLISECONDS); } #if BSP_TZ_SECURE_BUILD /* Enter non-secure code */ R_BSP_NonSecureEnter(); #endif }
演示
-
传感器
+关注
关注
2553文章
51489浏览量
757109 -
Studio
+关注
关注
2文章
192浏览量
28872 -
磁力计
+关注
关注
1文章
71浏览量
20966
发布评论请先 登录
相关推荐
十轴姿态传感器模块 | 集成加速度计、陀螺仪、磁力计,自带BLE5.0蓝牙

陀螺仪LSM6DSV16X与AI集成(11)----融合磁力计进行姿态解算

陀螺仪LSM6DSV16X与AI集成(10)----获取磁力计数据
磁力计LIS2MDL开发(4)----MotionMC 执行磁力计校准
驱动LSM6DS3TR-C实现高效运动检测与数据采集(11)----磁力计校准
陀螺仪LSM6DSOW开发(6)----获取磁力计数据
e2studio开发三轴加速度计LIS2DW12(1)----轮询获取加速度数据

驱动LSM6DS3TR-C实现高效运动检测与数据采集(10)----融合磁力计进行姿态解算
驱动LSM6DS3TR-C实现高效运动检测与数据采集(9)----获取磁力计数据
脑磁图(MEG)新型技术及功能特点-多通道光泵磁力计便携平台

e2studio开发磁力计LIS2MDL(2)----电子罗盘
e2studio开发磁力计LIS2MDL(1)----轮询获取磁力计数据





 工商网监
工商网监
评论