 LVGL适配到OpenMV工程的实现方法
LVGL适配到OpenMV工程的实现方法

板级适配
得益于官方团队对 RA8D1-Vision Board 的 SDK 贴心地维护,对于板级配置文件 configuration.xml 板载的摄像头、SDRAM、LCD、TOUCH 等众多外设都已经配置好了
LVGL 适配到 OpenMV 工程
menuconfig 配置
LVGL 配置
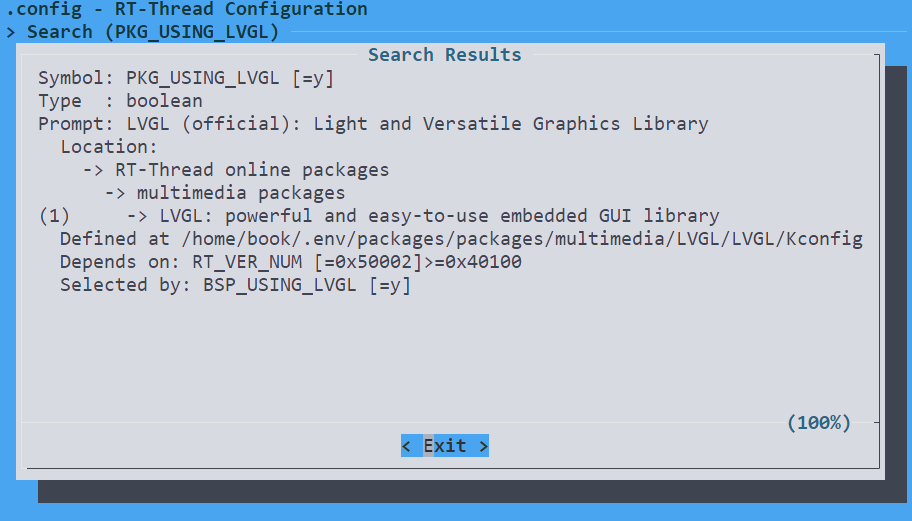
在 SDK 中的 openmv 工程的基础上进行修改,添加 LVGL V8 的 packages 包,使用 scons --menuconfig 命令进入配置窗口,直接键入 / 来查找 PKG_USING_LVGL 这个宏
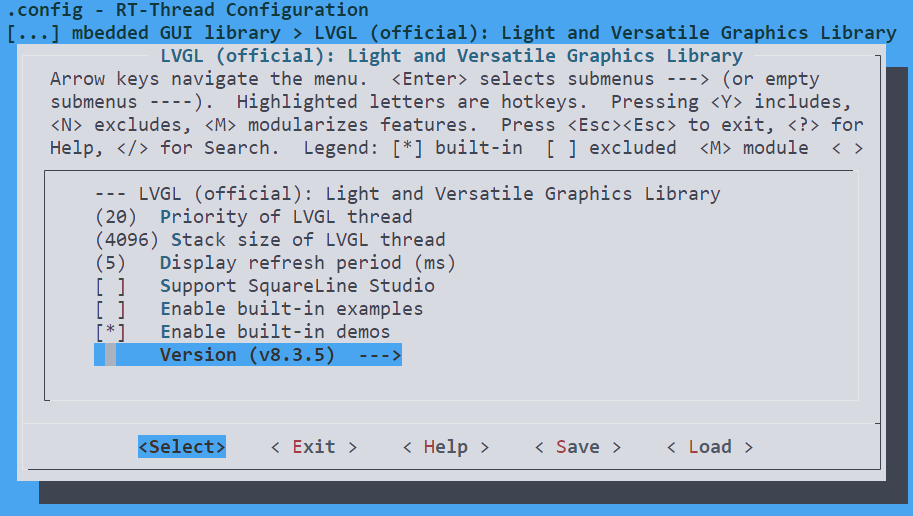
然后按 1 跳转到 LVGL 的设置界面,修改版本为 V8.3.5 版本,因为之后使用 GUI Guider 设计界面,我用的 GUI Guider 的 LVGL 版本是 V8.3.5,当然也可以用别的版本,porting 的代码可能有些许不一样
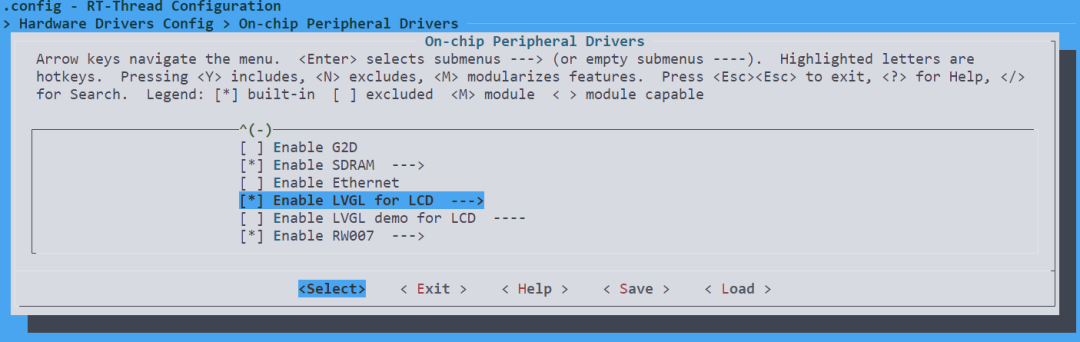
还需要在 > Hardware Drivers Config > On-chip Peripheral Drivers 中使能 LVGL for LCD
触摸配置
在官方 SDK 的 openmv 例程中触摸是没有被使能的,这里需要使能一下,在 > RT-Thread online packages > peripheral libraries and drivers > touch drivers 中使能 cst812t 的驱动
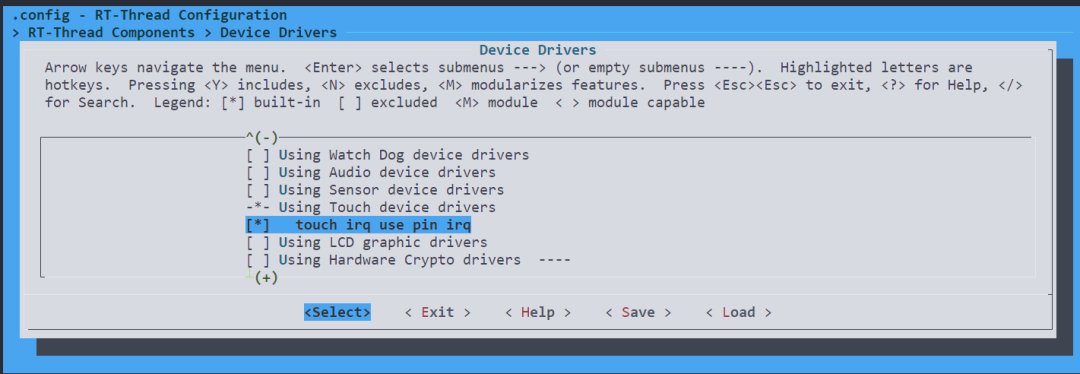
然后在 > RT-Thread Components > Device Drivers 中使能触摸中断管脚的驱动
最后把 packages 包下载下来

porting 配置
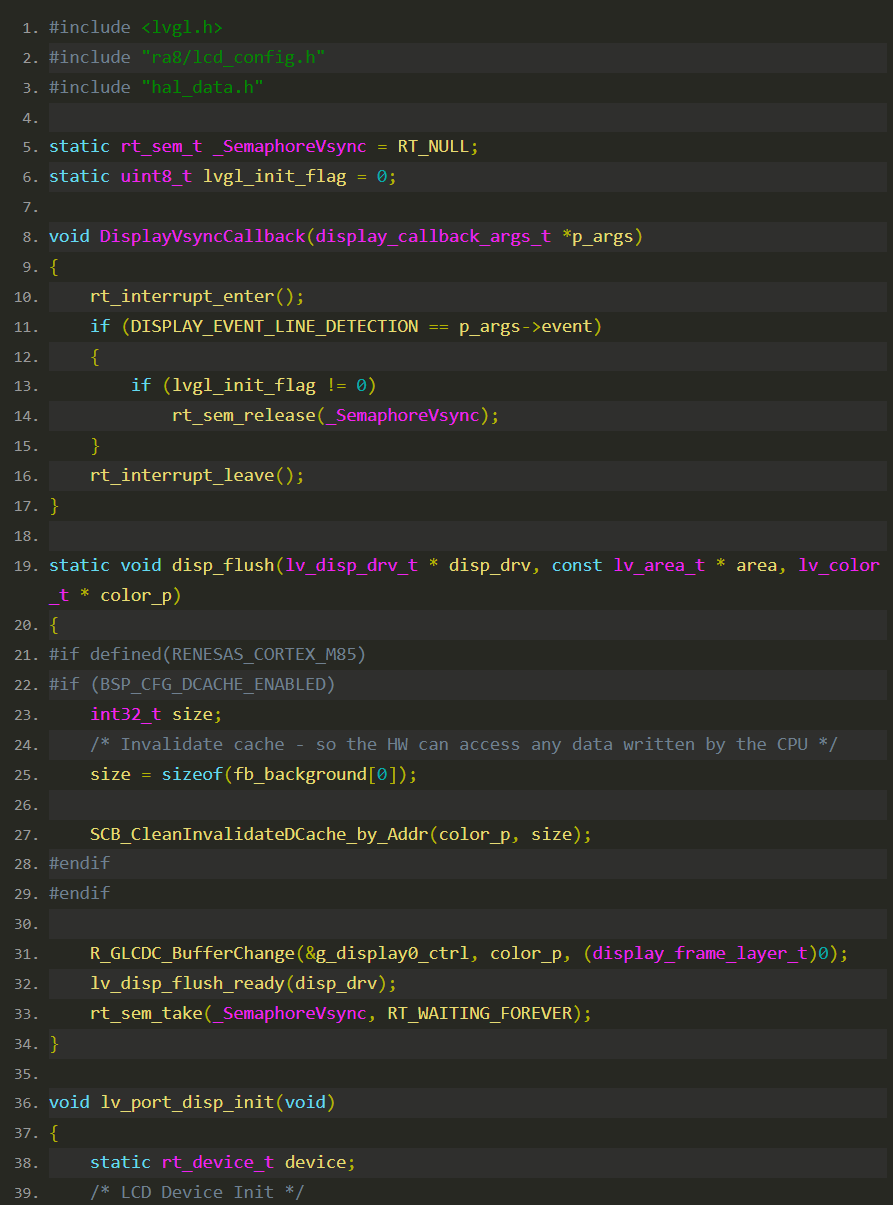
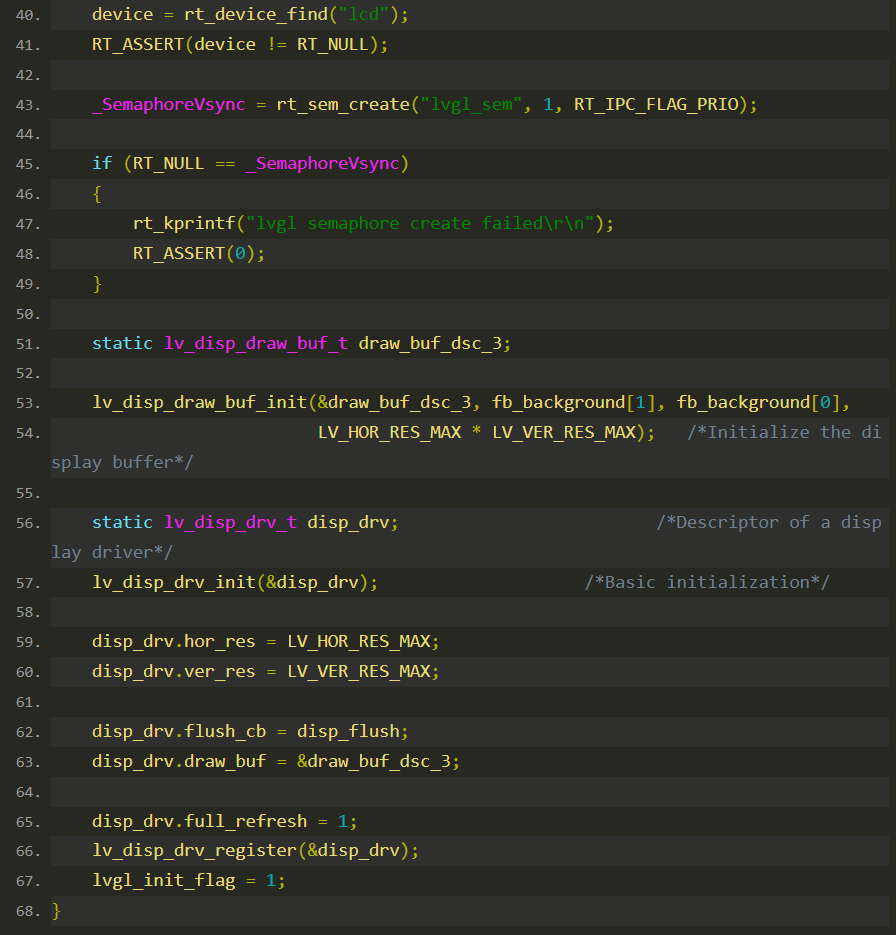
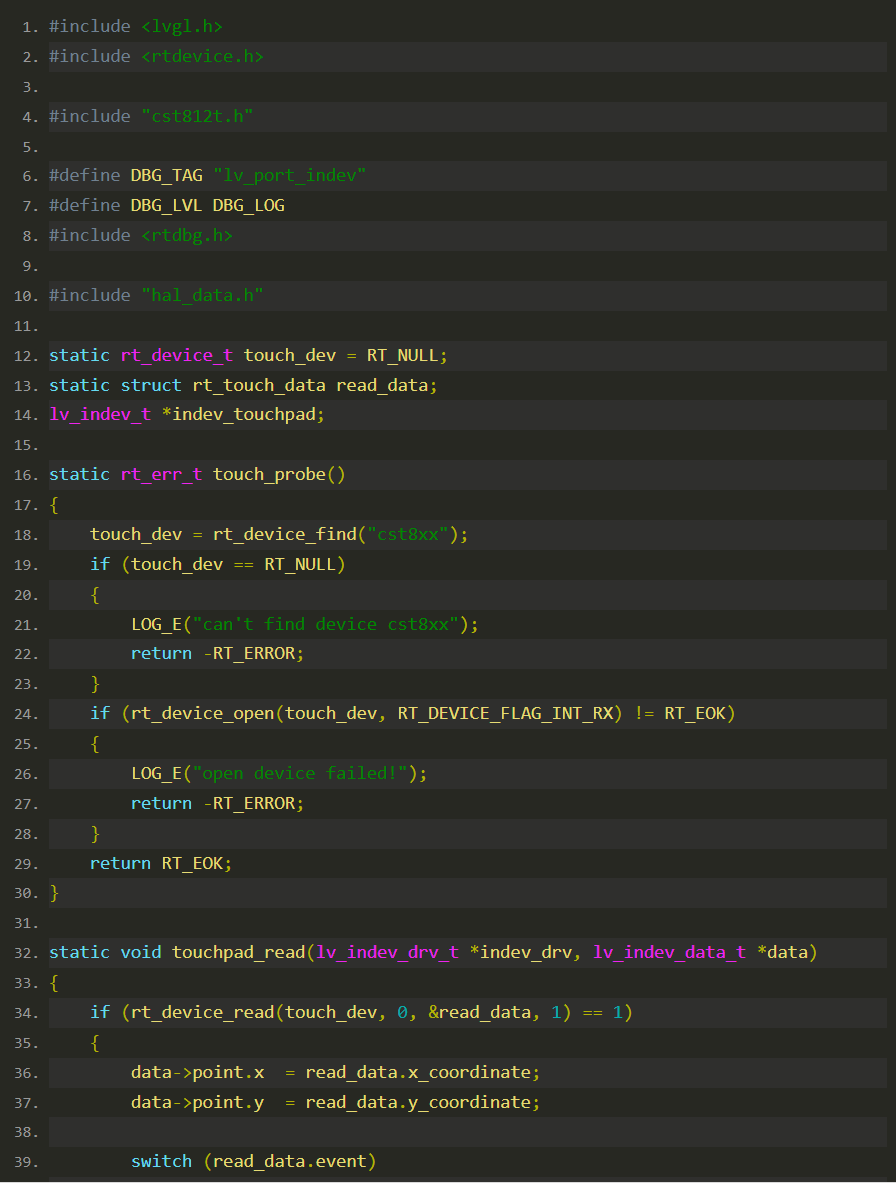
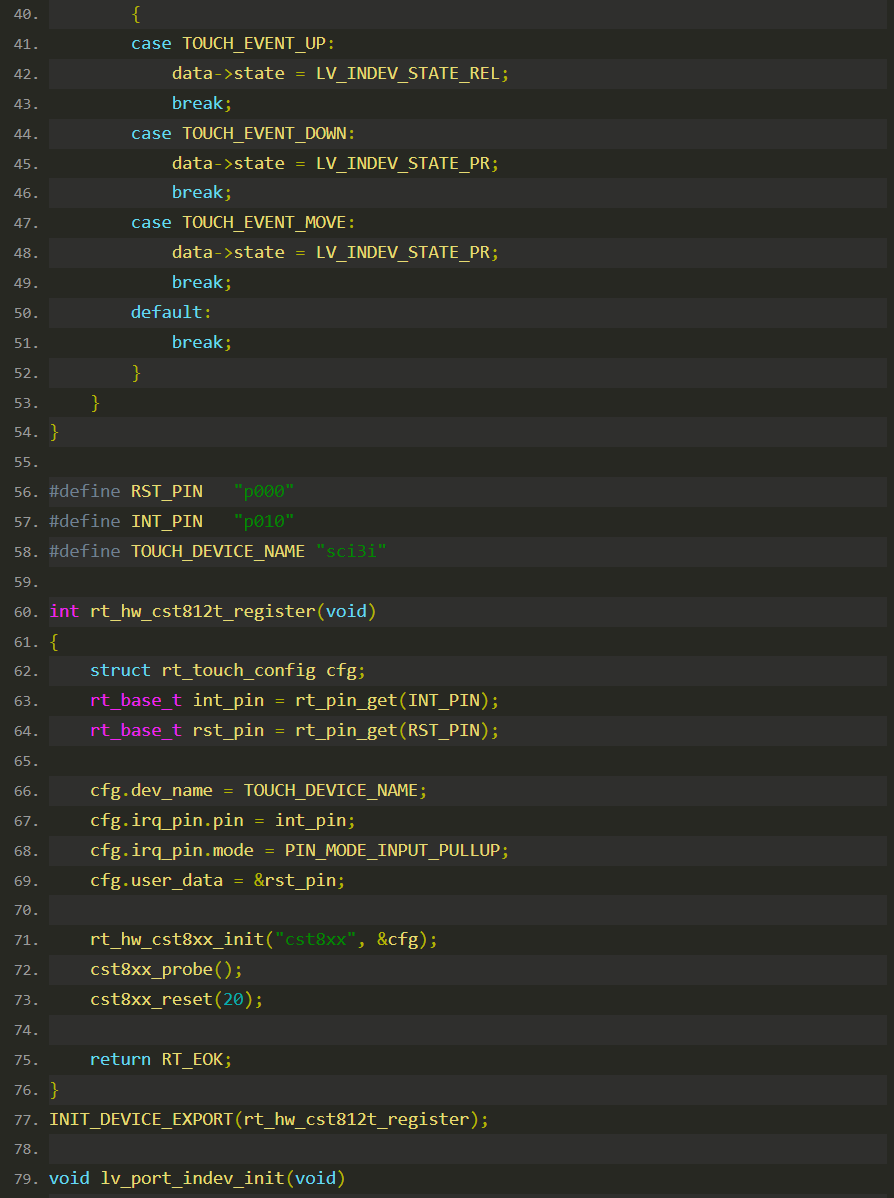
这时 lvgl 的完整代码已经自动添加到编译环境中,下一步就是在 board 文件夹中适配 porting,和之前的文章类似,依然是 lv_conf.h、lv_port_disp.c、lv_port_indev.c 这些文件,这里就不再赘述,直接上代码
lv_port_disp.c 和之前文章的代码不太一样,修改成了全屏刷新的方式
lv_port_disp.c
lv_port_indev.c
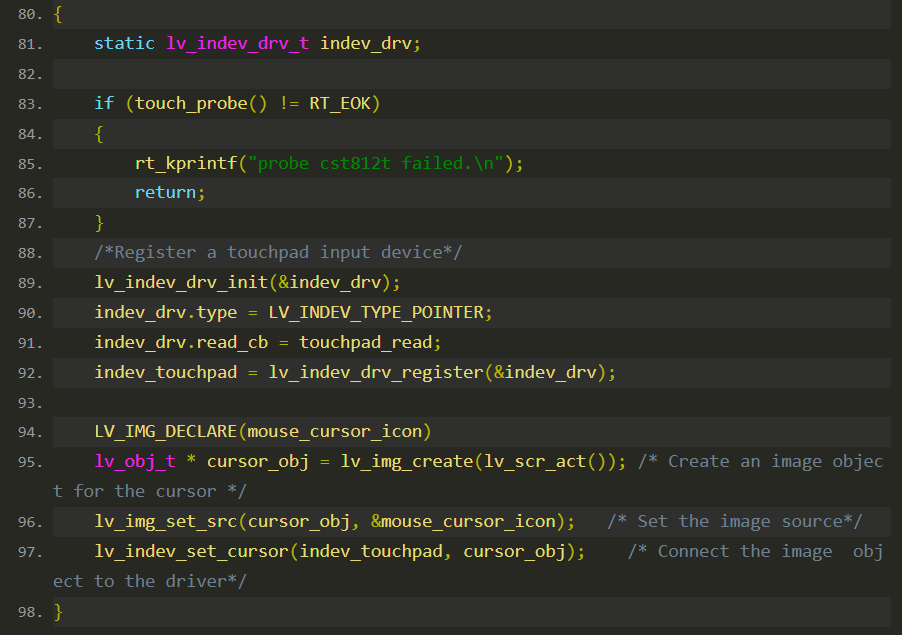
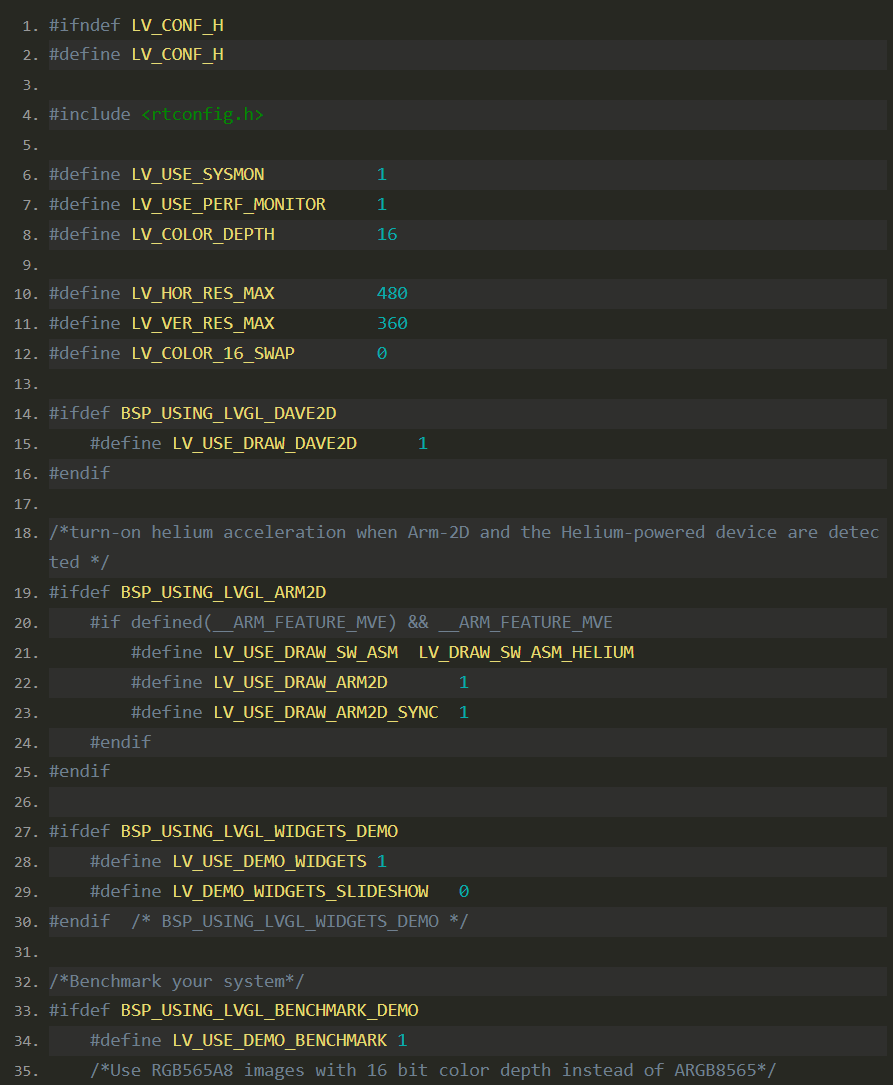
lv_conf.h
demo 测试
适配好了 LVGL,下面运行个 demo 试一下,在 LVGL 的设置中,将 Enable built-in demos 使能
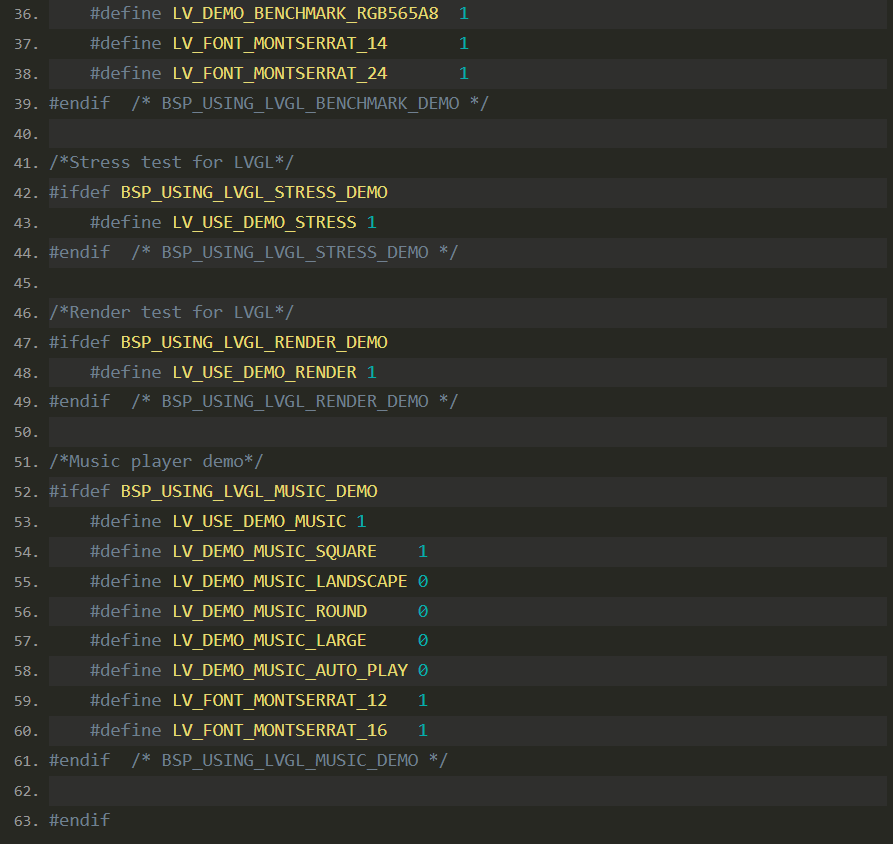
board/Kconfig 中关于 LVGL 的配置是 V9 版本的,所以需要改一下
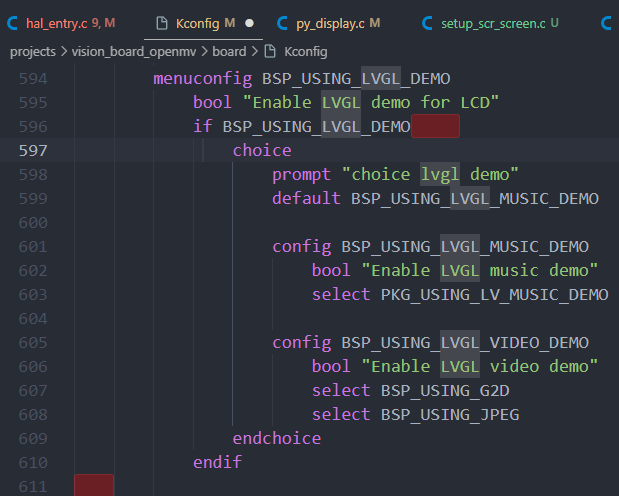
修改为
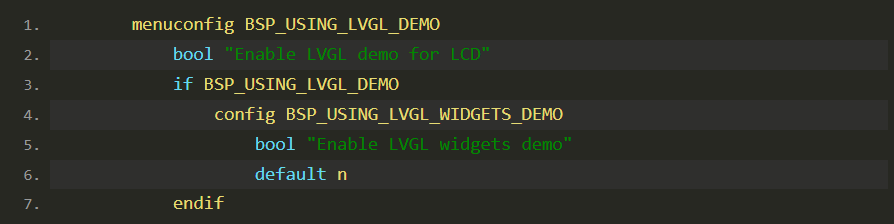
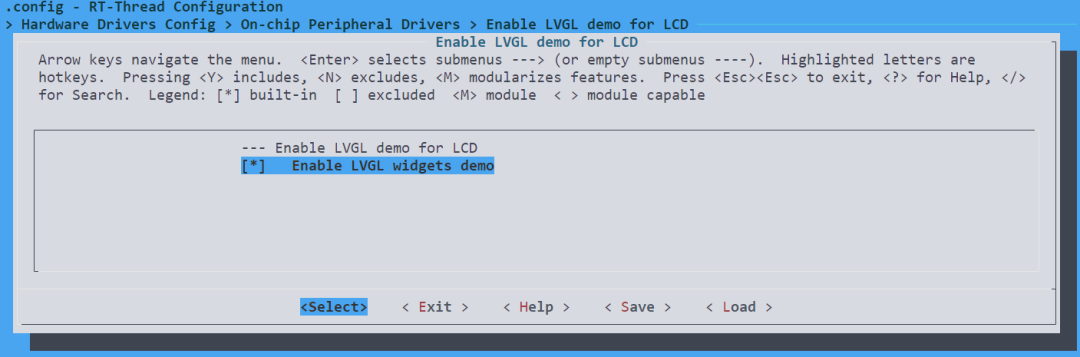
然后使能 widgets 的 demo
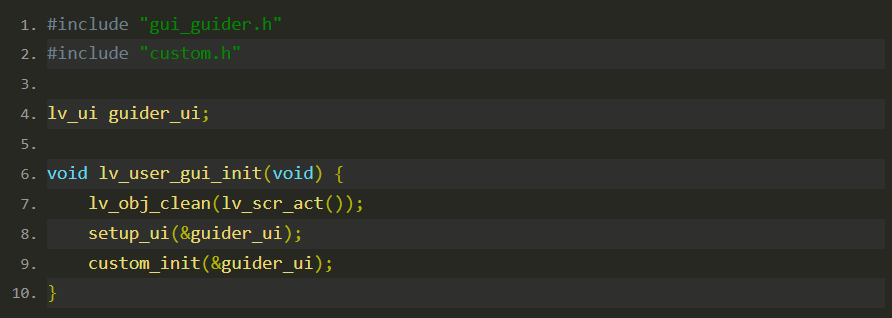
在 hal_entry.c 中添加代码,lv_user_gui_init 会自动被调用
Overflow修改
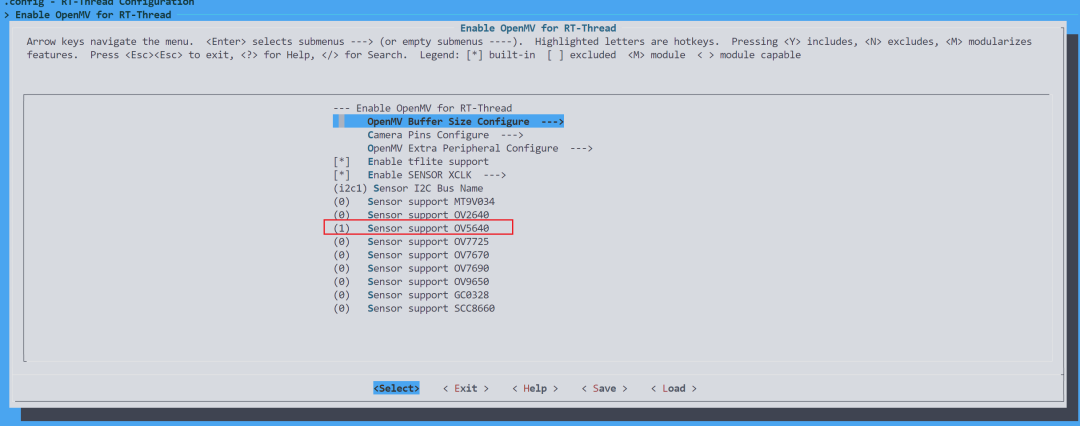
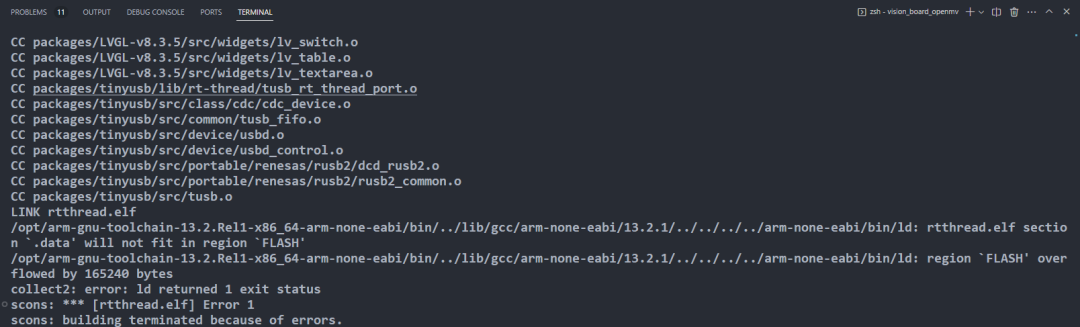
Surprise,此时,最关键的一步来了,这个时候直接编译的话,会 overflow,region `FLASH’ overflowed by 165240 bytes,足足超了100多KB的Flash,这就需要缩减一些配置了
因为开发板上的摄像头是 OV5640,所以把其他的摄像头驱动都删掉
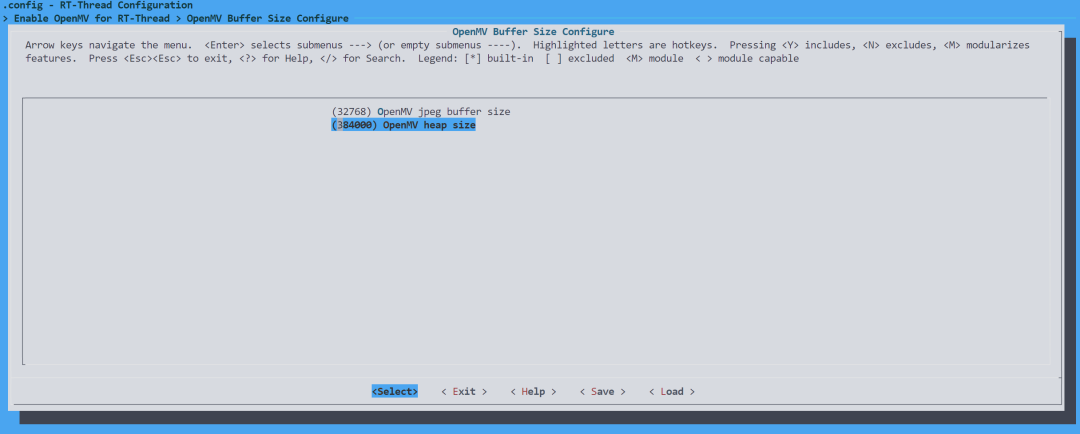
将 openmv 的 buffer 从默认的 512000 改成 384000,或者改到 256000
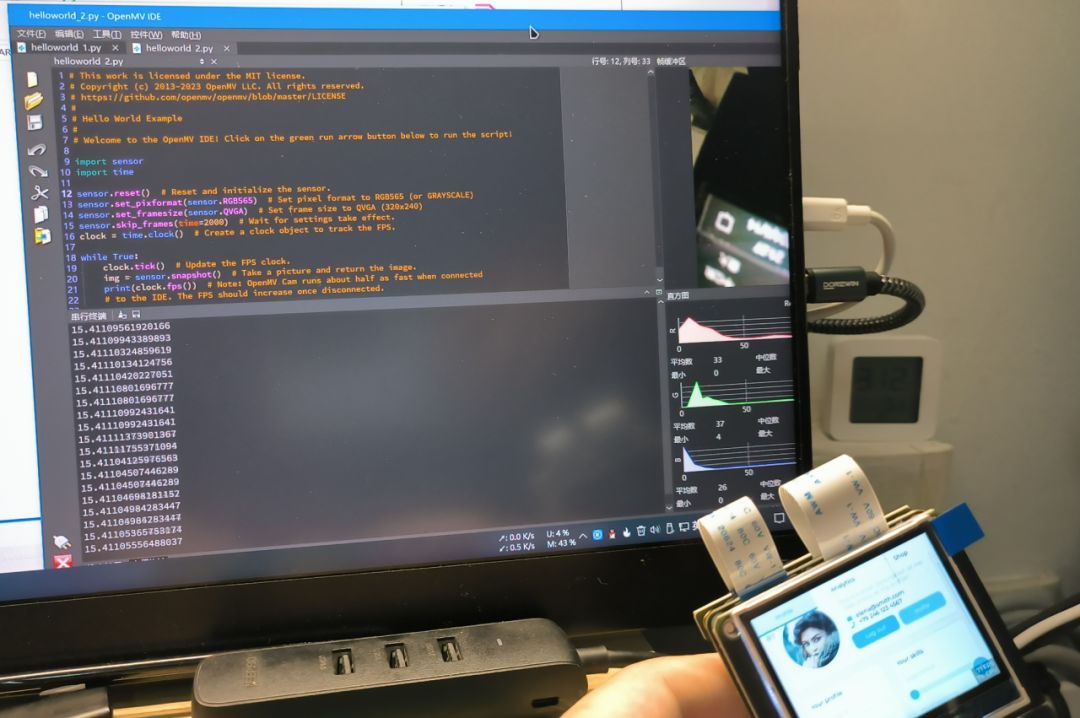
编译烧录到开发板,可以看到 openmv 运行 hello world 例程的时候同时运行着 LVGL V8 的 widgets 的 demo
触摸也可以正常使用
至此,实现了 openmv 和 LVGL 的共存,实现了同时运行,当然这还不够,下面开始介绍 GUI guider 设计界面和如何在 openmv IDE 上使用 micropython 调用 LVGL
界面设计
GUI Guider
使用 GUI Guider 来进行 LVGL 的拖拽式设计一个简单界面,左边用来显示摄像头内容,右边用来显示识别结果和 logo

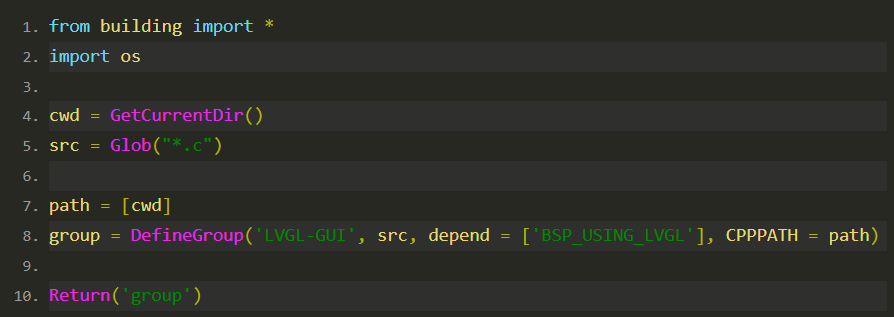
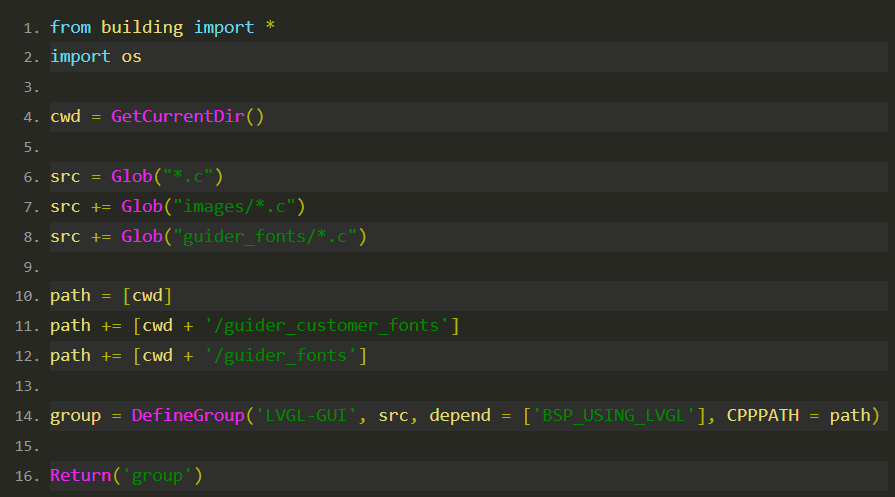
生成代码后添加到工程当中,然后在 custom 和 generated 文件夹中添加两个 SConscript 文件,内容如下
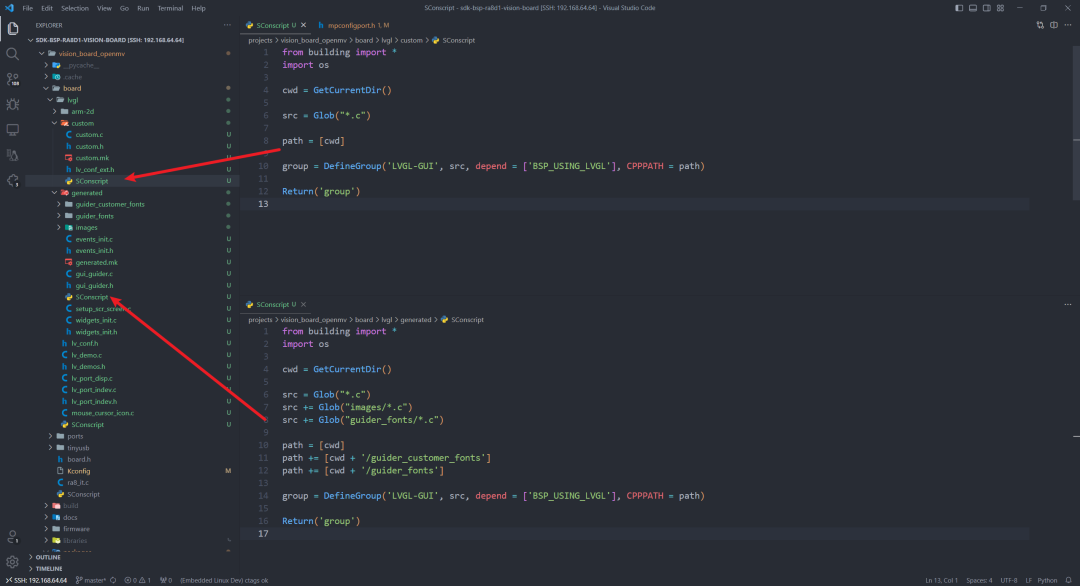
目录树如下
然后把刚刚的 demo 代码修改为如下内容,载入 GUI Guider 生成的界面
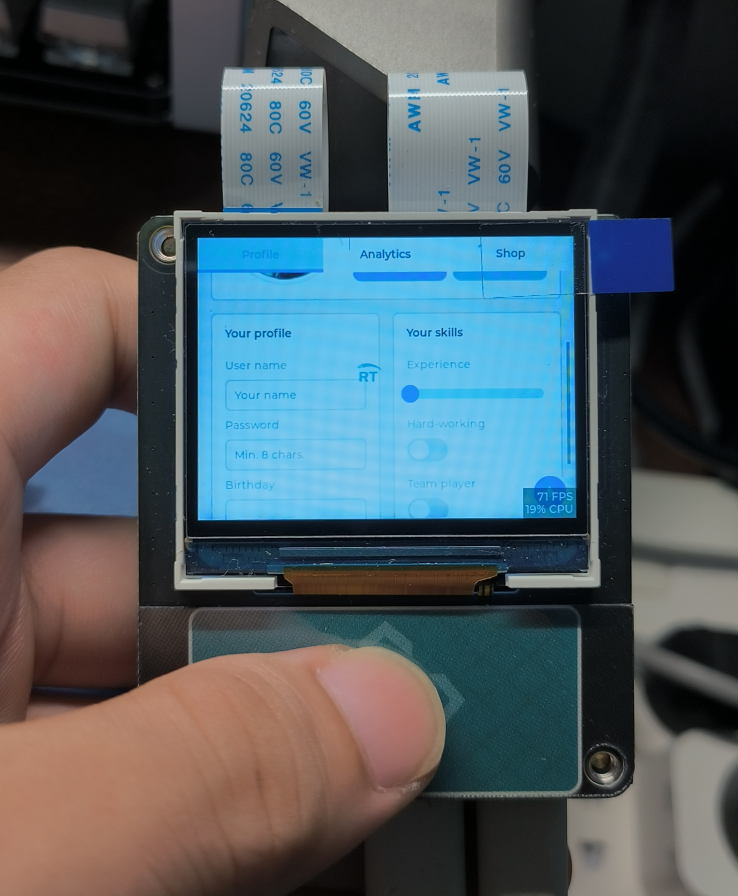
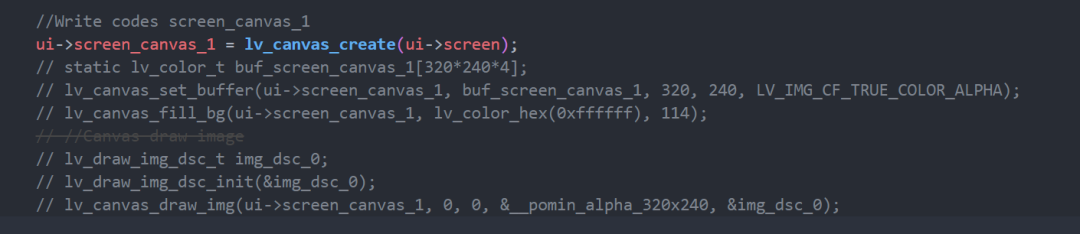
编译烧录到开发板,可以看到刚刚设计的这个界面,左边的因为是 canvas 控件,为了节省 RAM 空间,把生成的代码删除了一部分,所以是透明的
效果如下

LVGL 和 GUI Guider 界面完成,下面就开始接入到 mpy 了
添加 mpy 自定义库
解释型语言本质上都是词法解析、解释执行,或者直接点讲就是脚本,mpy 就属于解释型语言,添加一个自定义的库和方法也是十分容易的,在 mpy 的模块和方法的定义中,大量使用了宏的方式来对 C API 进行添加,当然这些宏的种类也有很多
添加模块与方法
模块的添加
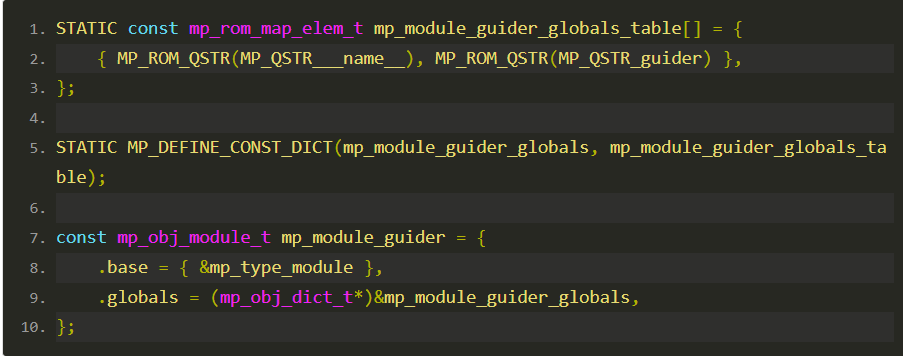
模块的定义程序范式如下,需要定义一个表放入模块的名字,然后使用 MP_DEFINE_CONST_DICT 宏来定义一个字典,然后定义一个 mp_obj_module_t 变量
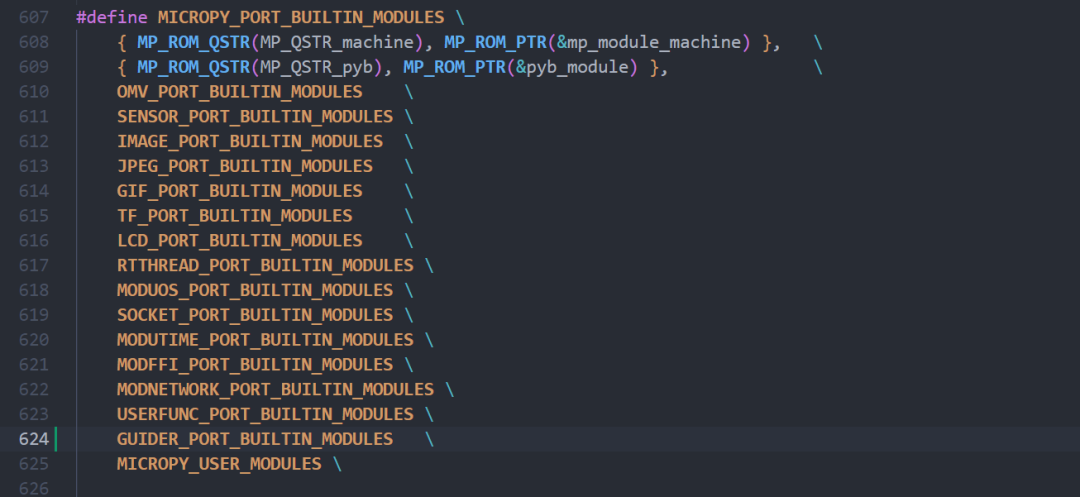
此时仅仅是定义了一个模块,并没有加入到 mpy 中,下一步 打开 packages/micropython-v1.13.0/port/mpconfigport.h 这个文件添加三行代码

然后添加到 MICROPY_PORT_BUILTIN_MODULES 这个宏中,就会参与到编译当中了
一般型方法
RT-Thread 也提供了一个生成器,仓库地址:https://github.com/SummerGift/RT-MicroPython-Generator,或者点开即用可以访问我的网站上面放的https://docs.pomin.top/codetools/RT-MicroPython-Generator
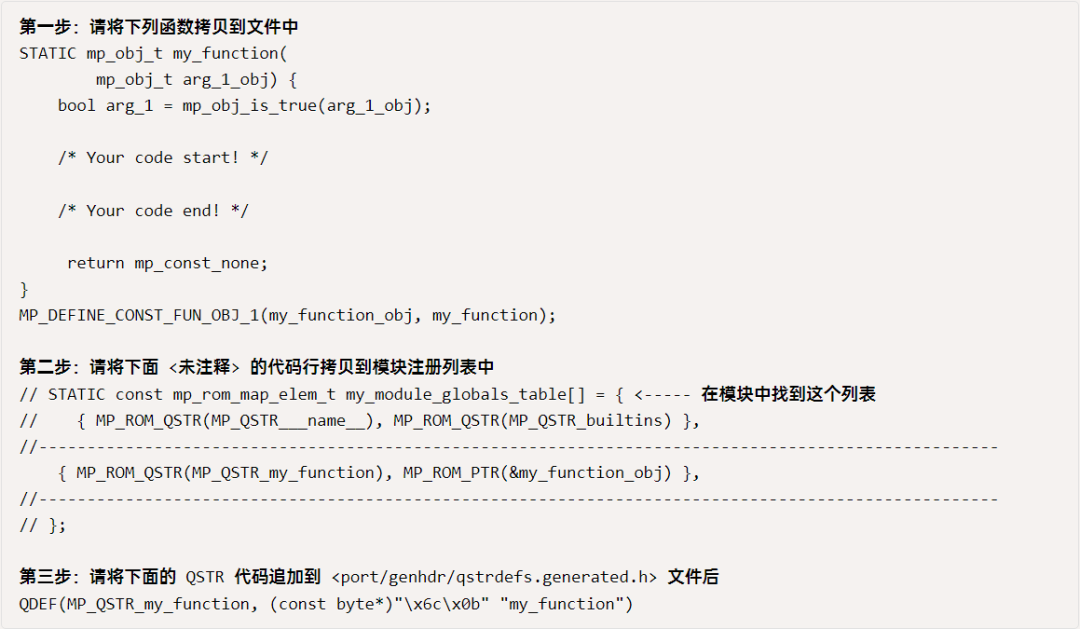
使用这个生成器,传入参数设置为 1 的时候,生成代码如下,使用的宏是 MP_DEFINE_CONST_FUN_OBJ_1,传入一个泛型指针 arg_1_obj,使用 mp_obj_is_true 来获取布尔类型的传入参数
mpy 对于参数使用泛型指针的 typedef 类型 mp_obj_t 来传参,然后使用一些 C 函数来获取对应的类型以及值,例如 mp_obj_get_int、py_image_cobj 等 C 函数来获取整数值、图像指针等
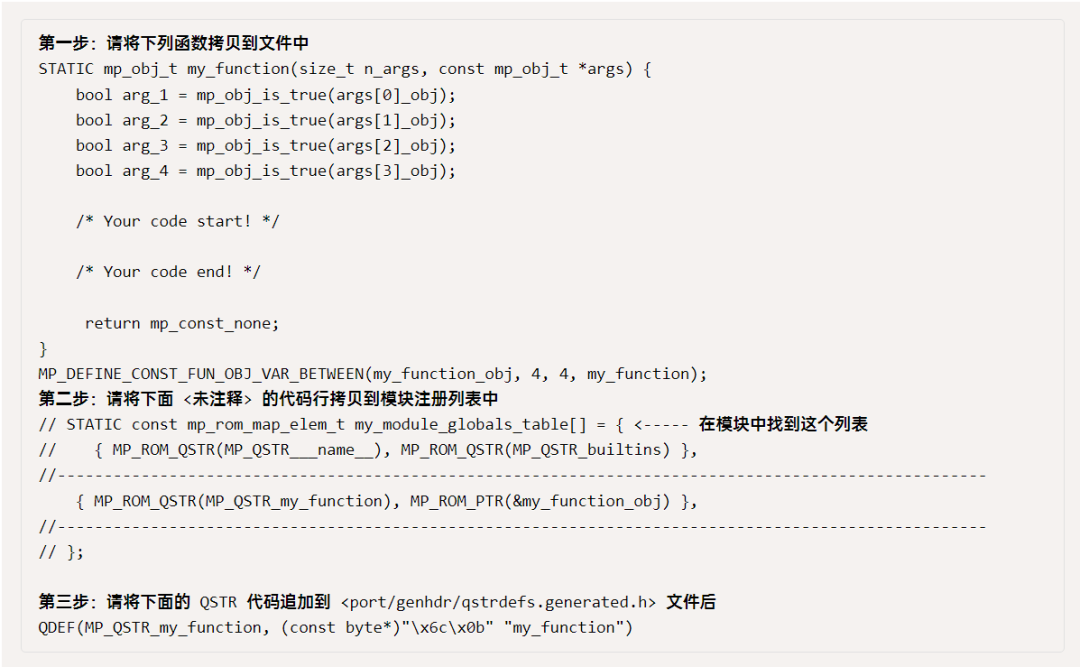
main 型方法
以此类推也有 MP_DEFINE_CONST_FUN_OBJ_0、MP_DEFINE_CONST_FUN_OBJ_2、MP_DEFINE_CONST_FUN_OBJ_3,但是参数过多的时候就不适合这样定义了,因为在 ARM 中需要控制参数的数量,这时就引出了 main 形式的定义宏,类似与 main 函数的 argc 和 argv,输入参数有 n_args 和泛型指针的指针 args
添加一个 log 方法
QSTR的生成
QSTR 宏定义也可以用前文的生成器来生成
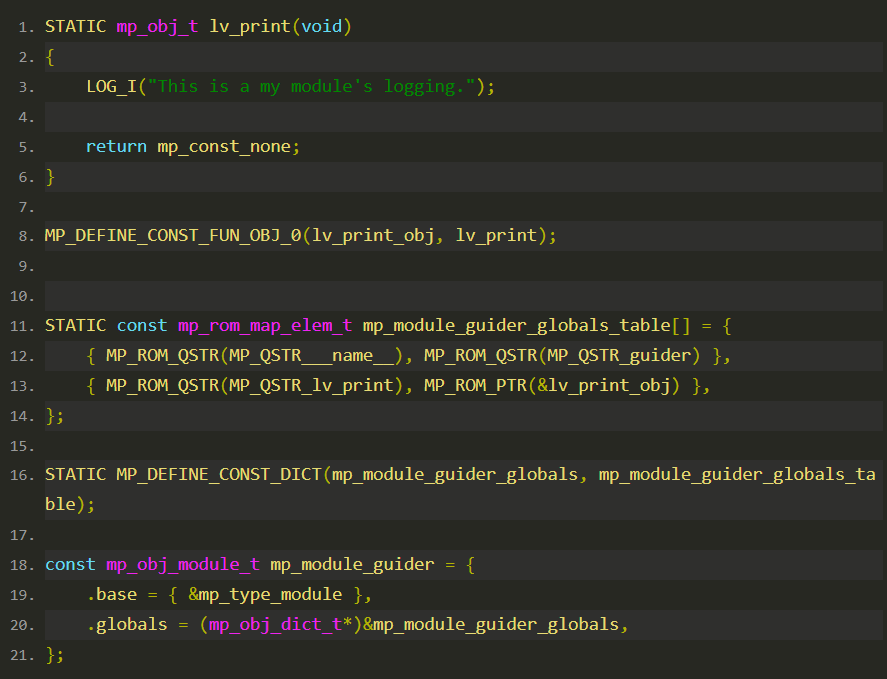
QSTR 的内容存放在 packages/micropython-v1.13.0/port/genhdr/qstrdefs.generated.h 中,可以使用 packages/micropython-v1.13.0/port/genhdr/gen_qstr.py 来生成,这里生成了三个后面需要用到的字符串,其中 guider 是模块名字,下面两个是模块的方法

添加方法
这里定义一个名字为 guider 的模块,带有一个名为 lv_print 的方法
按照前文的方法加入到 built module 宏中然后编译烧录到开发板中
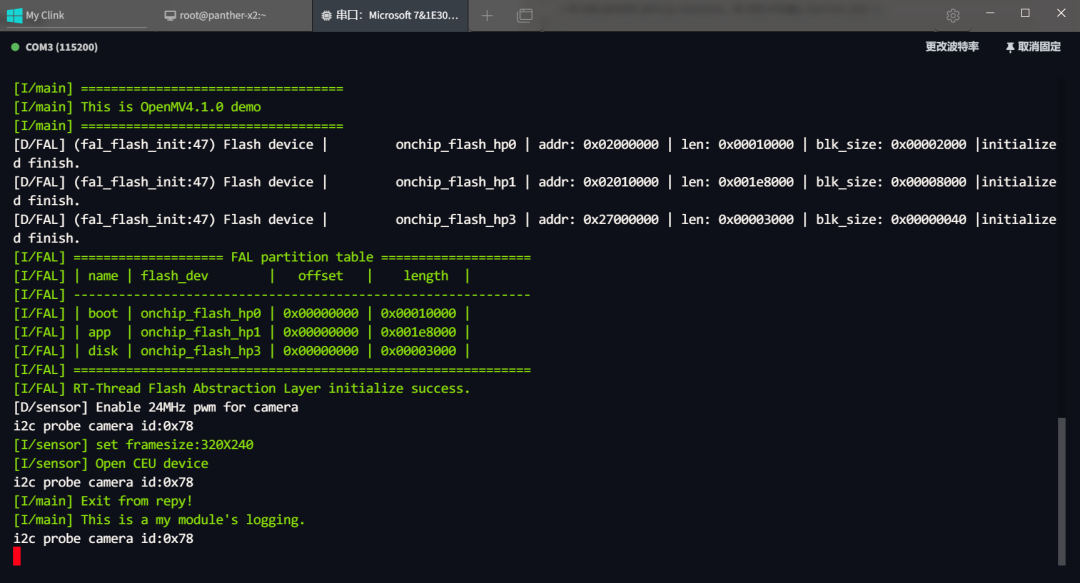
mpy 代码如下。import guider 模块然后调用 lv_print 方法

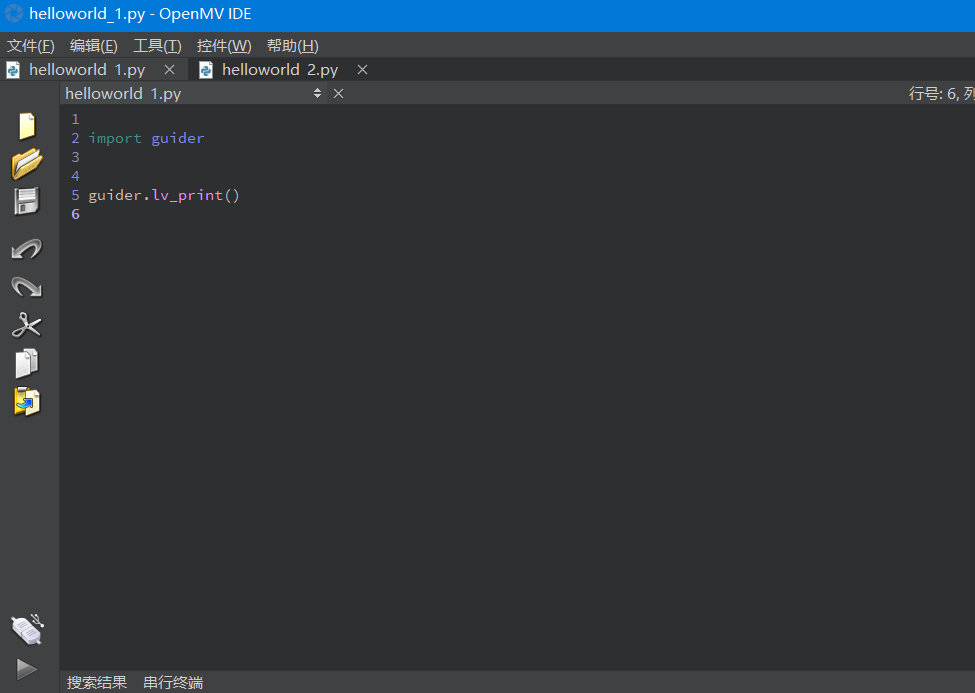
连接到开发板然后运行这个代码,可以看到 RTT 的终端打印出了代码中写的 log
添加LVGL的自定义方法
定义一个 main 型的方法,代码如下,实现传参一个图像类型的参数,获取了参数后拷贝到缓冲区,交由 canvas 控件来显示,并且根据图像大小自适应调节控件大小
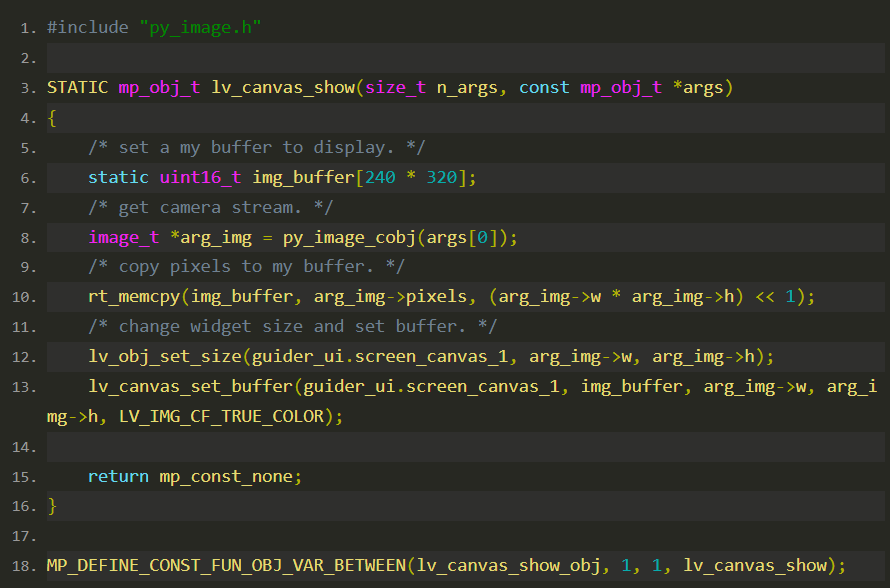
添加到 guider 模块中

此时就可以实现传入摄像头的图像到 canvas 控件来显示了,编译烧录到开发板,然后连接到 openmv IDE 运行如下 mpy 代码
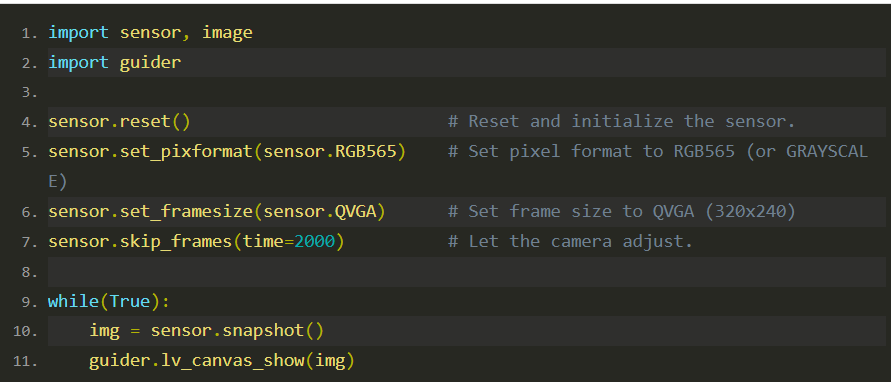
摄像头,启动!

再添加一个显示识别结果的方法,实现对传入的字符串显示到 LVGL 界面的 label 控件上
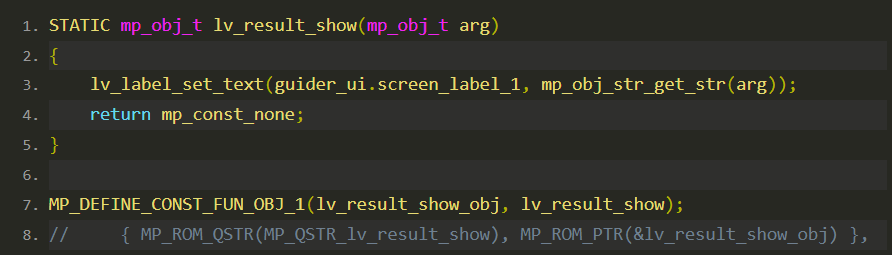
编译烧录到开发板中,在 openmv IDE 中运行如下代码

将 $ 显示到了界面的 label 控件上

运行tflite
对于怎么完成对于 tflite 模型的训练这里就不再重复介绍,可以参考这位大佬的文章 https://club.rt-thread.org/ask/article/69ef73018d63deef.html ,跟着一步步操作即可
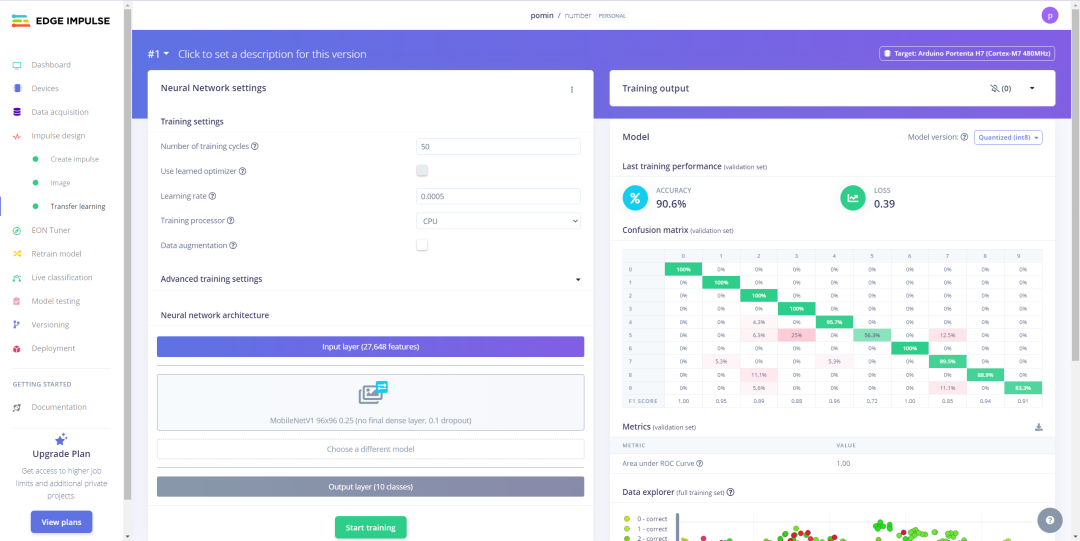
下载生成的可以部署到 openmv 的代模型和代码
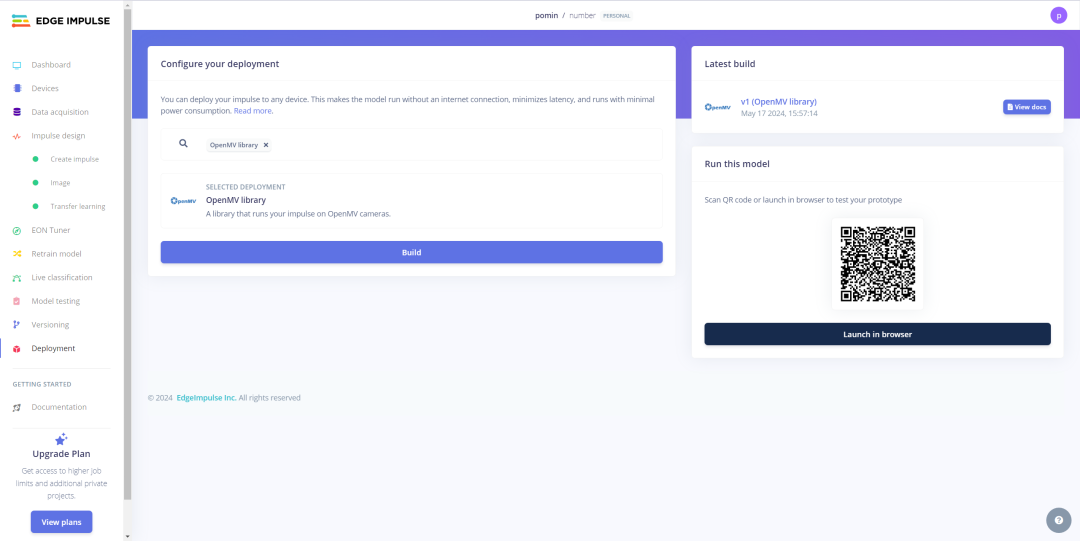
得到一个如下文件
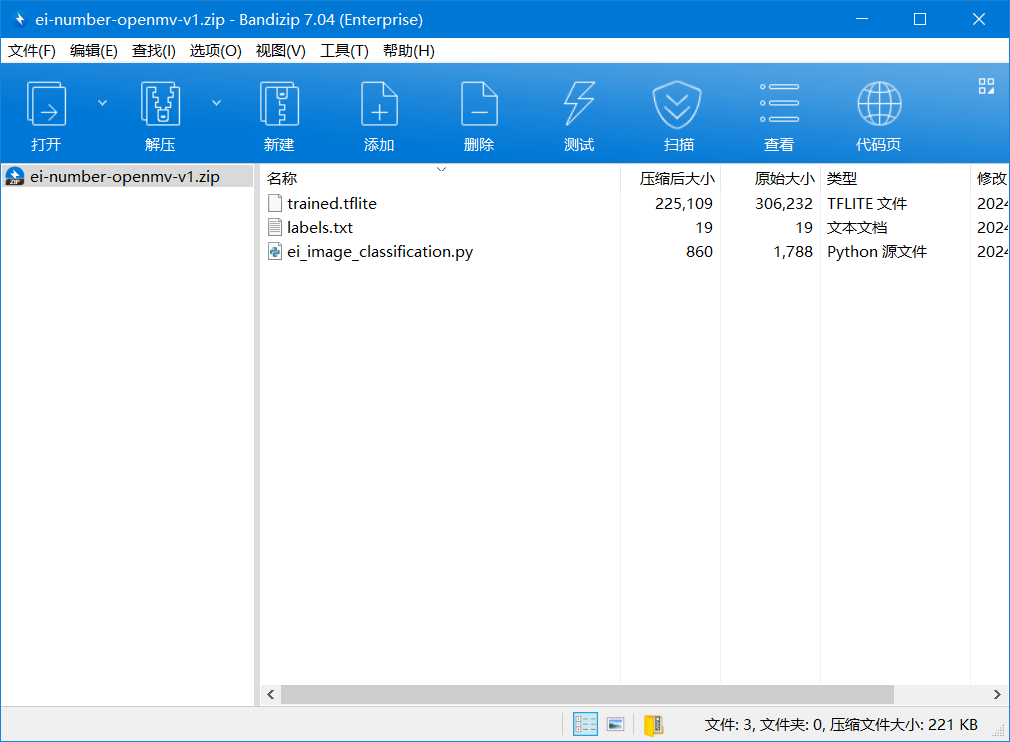
将 edge impulse 中生成的代码稍作修改,加入 guider 模块
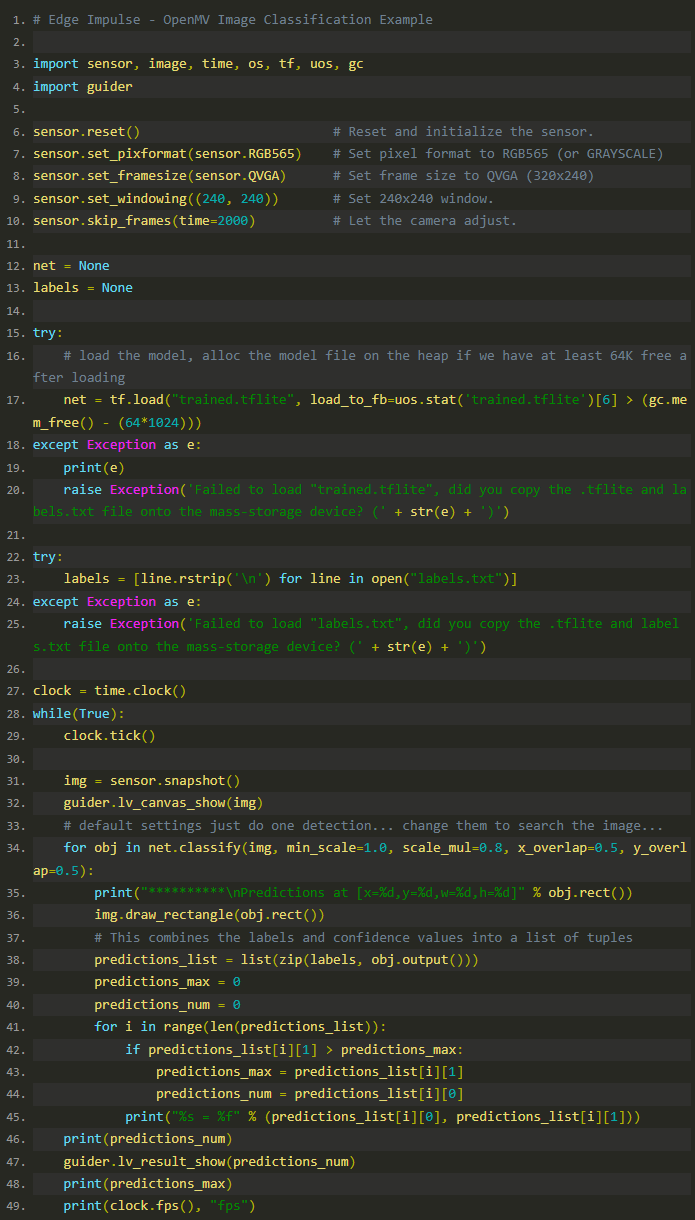
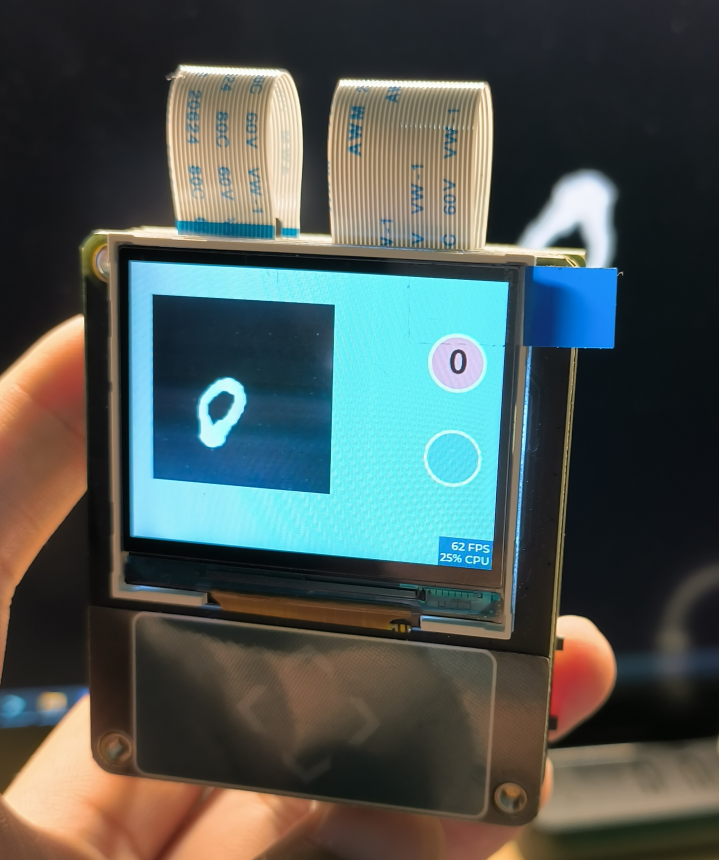
在 openmv IDE 上运行识别
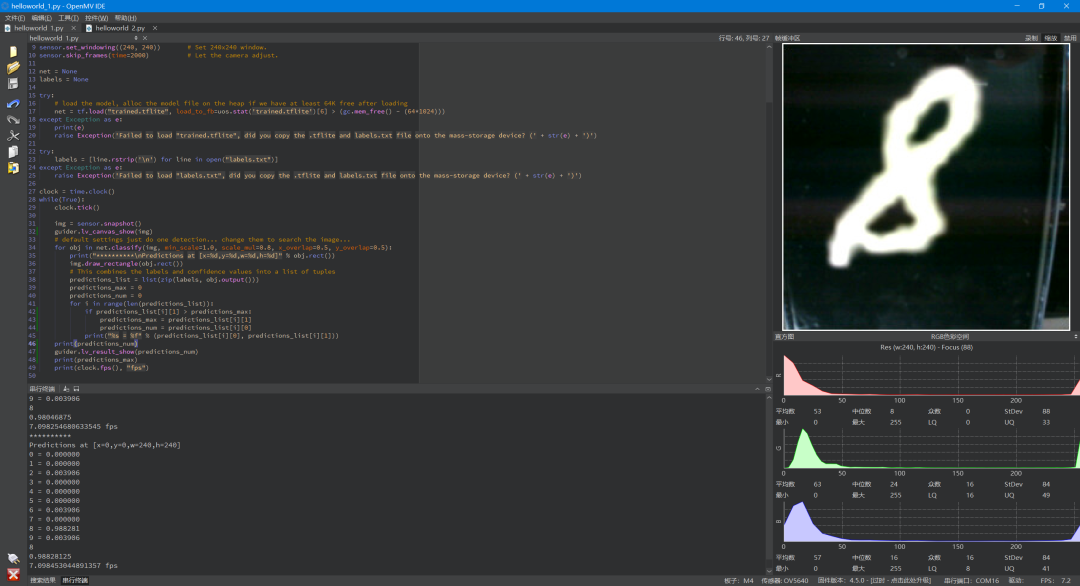
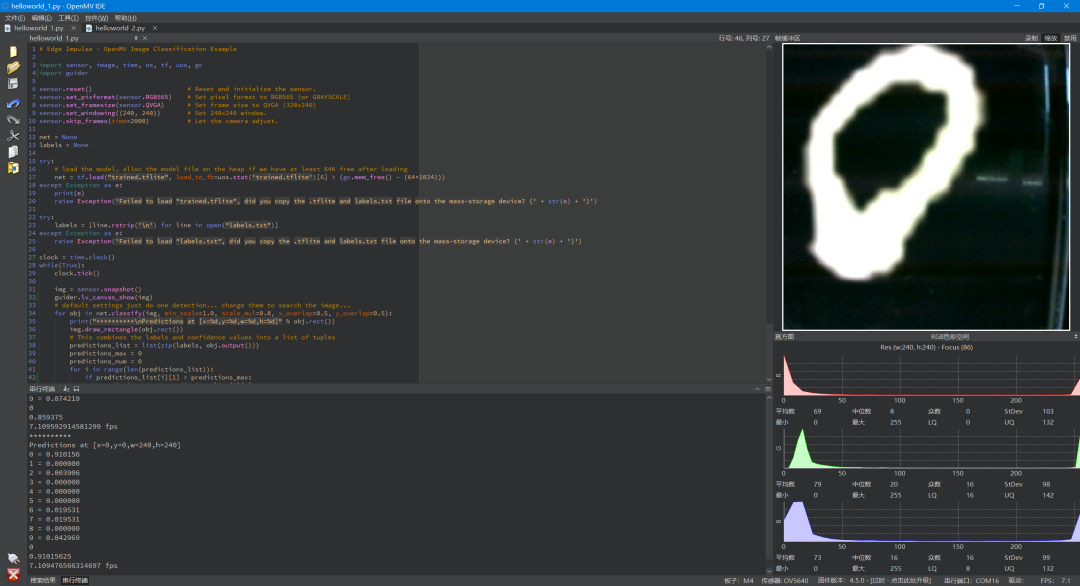
在开发板屏幕上显示 LVGL 界面、识别结果与摄像头画面
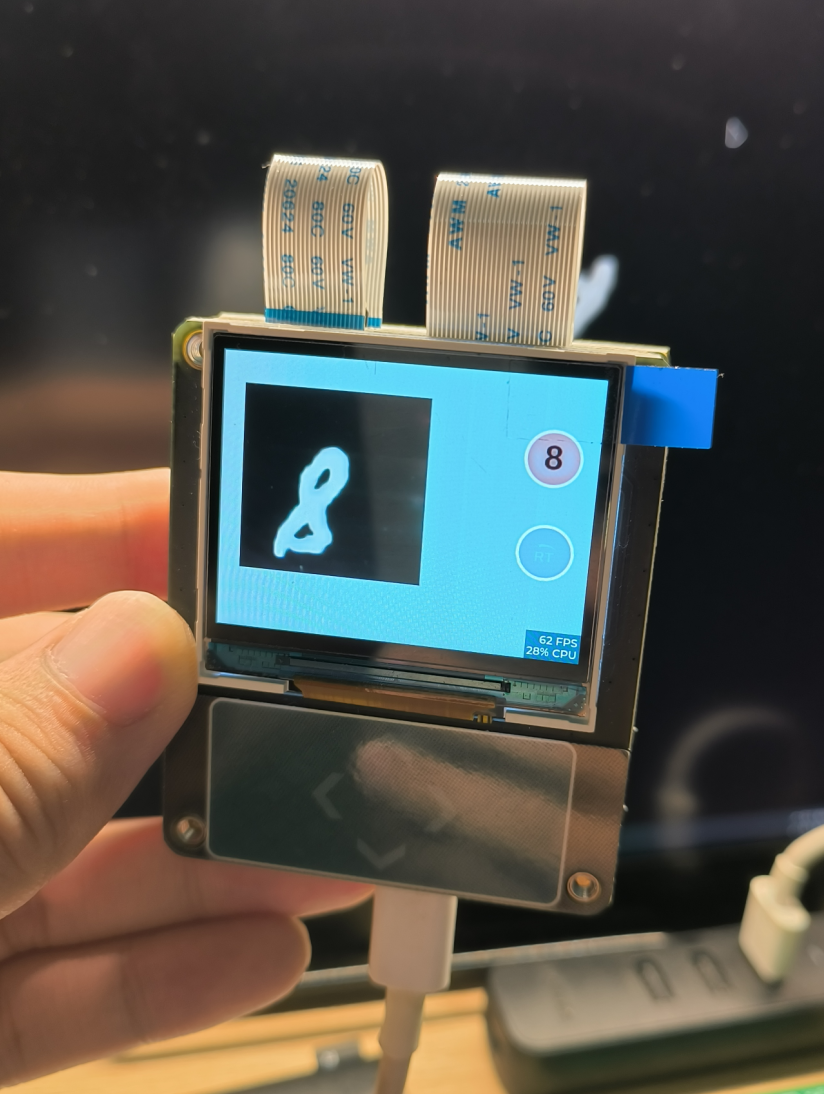
最终工程可见 Github 仓库 https://github.com/POMIN-163/RA8D1-Vision-Board-OpenMV-with-LVGL-V8
-
摄像头
+关注
关注
61文章
5130浏览量
103615 -
命令
+关注
关注
5文章
763浏览量
24086 -
SDK
+关注
关注
3文章
1113浏览量
52151 -
openMV
+关注
关注
3文章
40浏览量
10782
原文标题:如何优雅的在OpenMV上使用LVGL
文章出处:【微信号:RTThread,微信公众号:RTThread物联网操作系统】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
RT-Thread Studio上移植GUI-Guider-1.4开发LVGL8.2工程


如何在openmv中实现图传功能?
如何实现openmv和STM32之间的UART通讯?
OpenMV简单实现物体追踪
基于OPENMV和STM32的识别追踪小车设计实现
OPENMV和STM32的识别追踪小车(详细版)之OPENMV端

LVGL Simulation工程

OpenMV初识

基于OpenMV实现演示与导出





评论