 DeviceNet转Modbus TCP网关ENC-313 让WinCC对接上ABB机器人
DeviceNet转Modbus TCP网关ENC-313 让WinCC对接上ABB机器人
应用场景
西安某汽车制造公司在旧车间整改项目中,原车间在对材料执行切割工作时使用到了ABB机器人。每个切割工作站分配六台机器人同时工作,车间里存在多个工作站。中控室使用的上位机为WinCC,WinCC支持Modbus TCP以太网协议,两者之间不能直接进行通讯。如何通过WinCC来控制ABB机器人成为了改项目的一大难点。
作为长期以来的合作伙伴,第一时间联系到上海泗博寻找解决方案。最后选用了泗博DeviceNet转Modbus TCP网关ENC-313来实现两者之间的通讯。
产品功能
实现DeviceNet网络与Modbus TCP网络之间的数据通信。DeviceNet主站模式下可连接8台具有DeviceNet接口的设备到Modbus TCP网络。DeviceNet从站模式下可实现DeviceNet 主站与Modbus TCP主站之间的数据交换,广泛用于机器人、焊机、PLC与上位机、工控机之间的数据通信。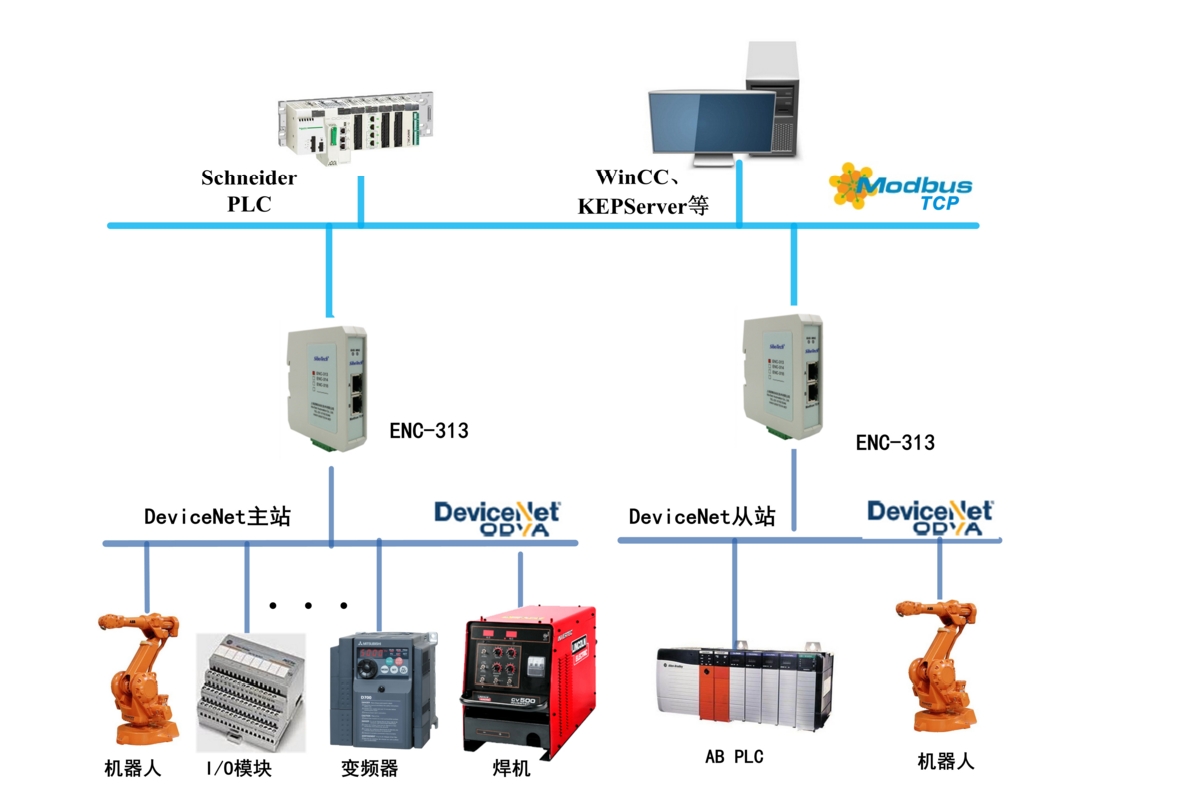
产品特点
【主站模式】支持将最多8个DeviceNet设备连接到ModbusTCP网络,如:具有DeviceNet接口的机器人、焊机、变频器等。
【从站模式】支持DeviceNet主站与ModbusTCP主站之间的数据交换,如:具有DeviceNet主站接口的机器人、PLC、焊机等设备和上位机、PLC之间的数据交换。
【应用简单】用户不必了解DeviceNet和Modbus TCP技术细节,只需要参考产品手册及应用实例,根据要求完成配置,即可在短时间内实现通信。
【透明通信】用户可以依照Modbus TCP通信数据区和DeviceNet通信数据区的映射关系,实现DeviceNet网络与Modbus TCP网络之间的数据透明通信。
【配置高效】网关通过DNetStart软件可以在线扫描DeviceNet从站,快速获取其I/O参数并进行参数配置,支持在线调试功能,支持离线上下载,离线配置,支持DeviceNet主/从模式切换。
审核编辑 黄宇
-
机器人
+关注
关注
211文章
28366浏览量
206887 -
MODBUS
+关注
关注
28文章
1796浏览量
76935 -
网关
+关注
关注
9文章
4435浏览量
51041 -
TCP
+关注
关注
8文章
1353浏览量
79052 -
DeviceNet
+关注
关注
1文章
111浏览量
16660
发布评论请先 登录
相关推荐
DeviceNet主站转Modbus TCP协议网关

EtherCAT转Modbus TCP协议网关(JM-ECT-TCP)

DeviceNet转Modbus TCP协议网关(YC-DNT-TCP)

DeviceNet主站转Modbus TCP协议网关(YC-DNTM-TCP)
钡铼空调协议转Modbus网关BL120AC实现设备对接WinCC系统

DeviceNet转Modbus-TCP协议转化网关通讯配置案例
DeviceNet转Modbus-TCP协议转化网关通讯解决方案

揭秘汽车制造神器:DeviceNET转Modbus TCP神操作
揭秘汽车制造神器:DeviceNET转Modbus TCP神操作

火力发电必备:DeviceNET转Modbus TCP神技

火力发电必备:DeviceNET转Modbus TCP神技
Ethernet/IP转Modbus TCP网关






 工商网监
工商网监
评论