 第六章-电机驱动和PWM STM32项目
第六章-电机驱动和PWM STM32项目
这是全网最详细、性价比最高的STM32实战项目入门教程,通过合理的硬件设计和详细的视频笔记介绍,硬件使用STM32F103主控资料多方便学习,通过3万字笔记、12多个小时视频、20多章节代码手把手教会你如何开发和调试。让你更快掌握嵌入式系统开发。
V3.3.0-STM32智能小车
视频:
https://www.bilibili.com/video/BV16x4y1M7EN/?spm_id_from=333.337.search-card.all.click
V3:HAL库开发、功能:PID速度控制、PID循迹、PID跟随、遥控、避障、PID角度控制、视觉控制、电磁循迹、RTOS等功能。
第六章-电机驱动和PWM
6.1-认识电机驱动
项目使用电机驱动芯片为A4950、下面是电机驱动的相关介绍
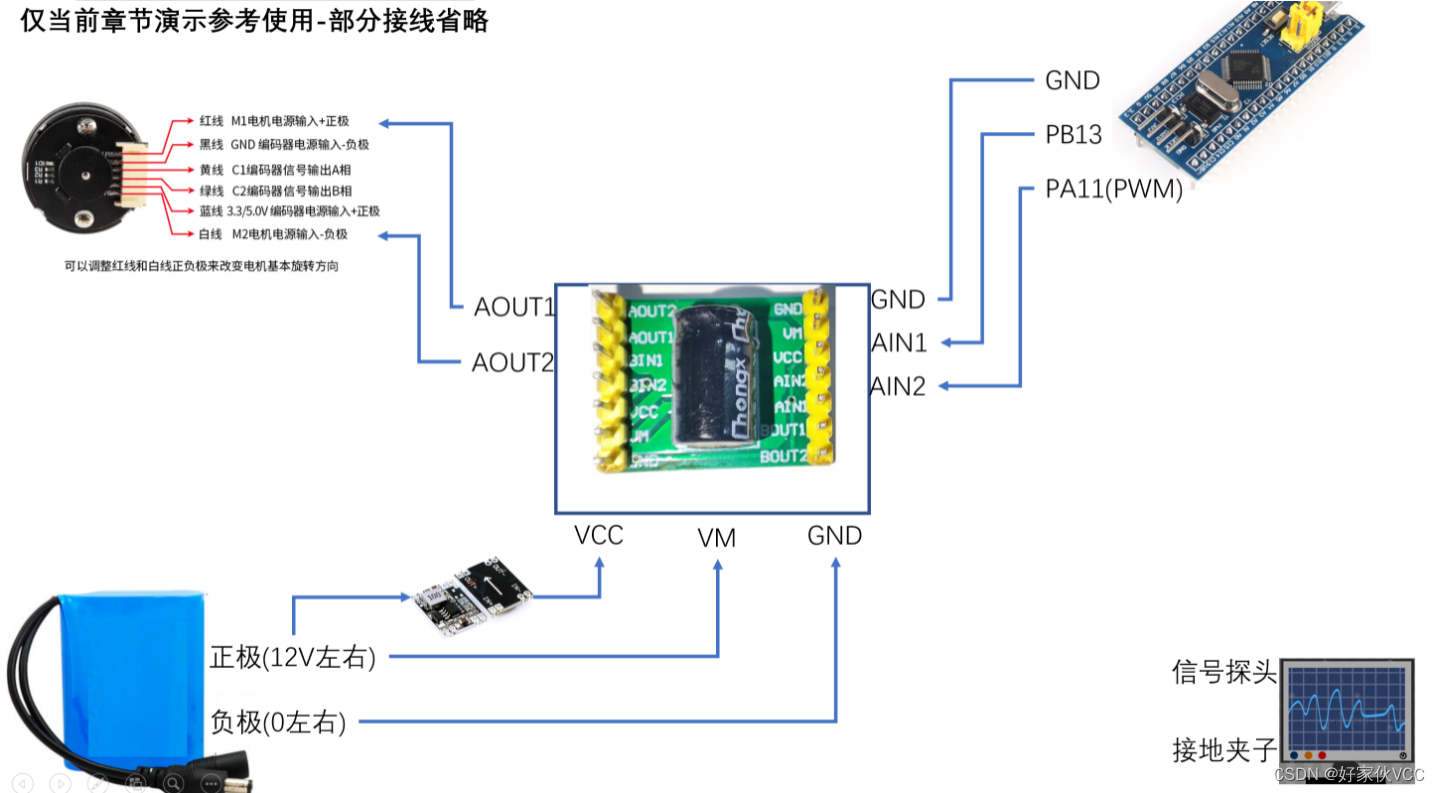
我们按照这种使用方法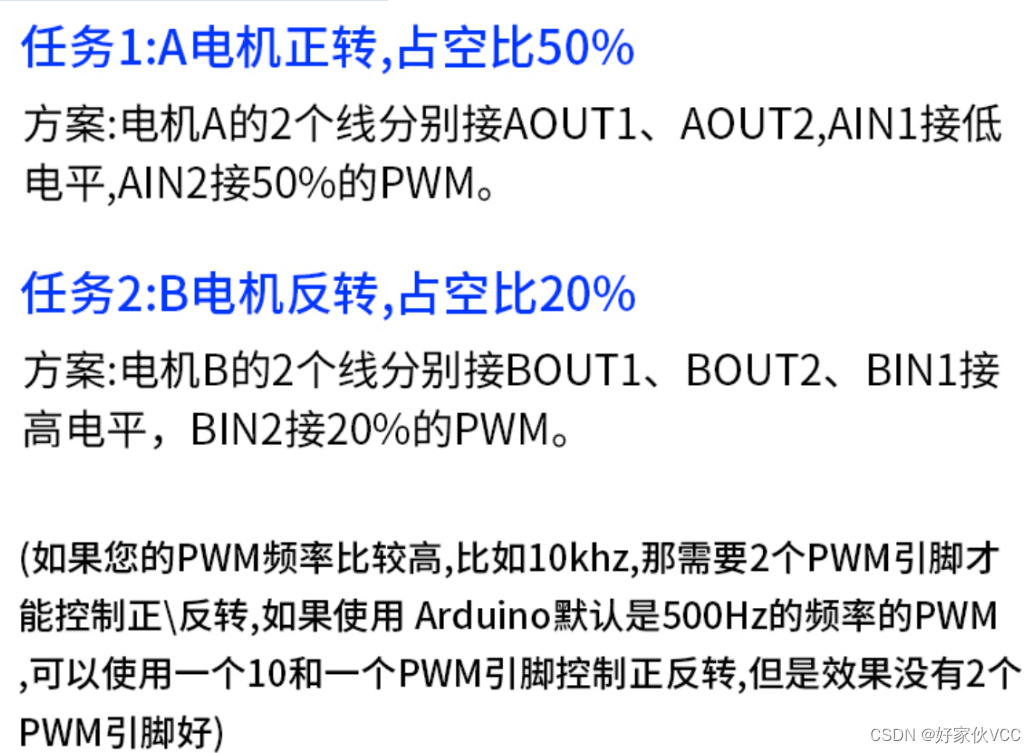
这我们使用一个图介绍
6.2-使用电机驱动(独立工程)
分析和编写代码
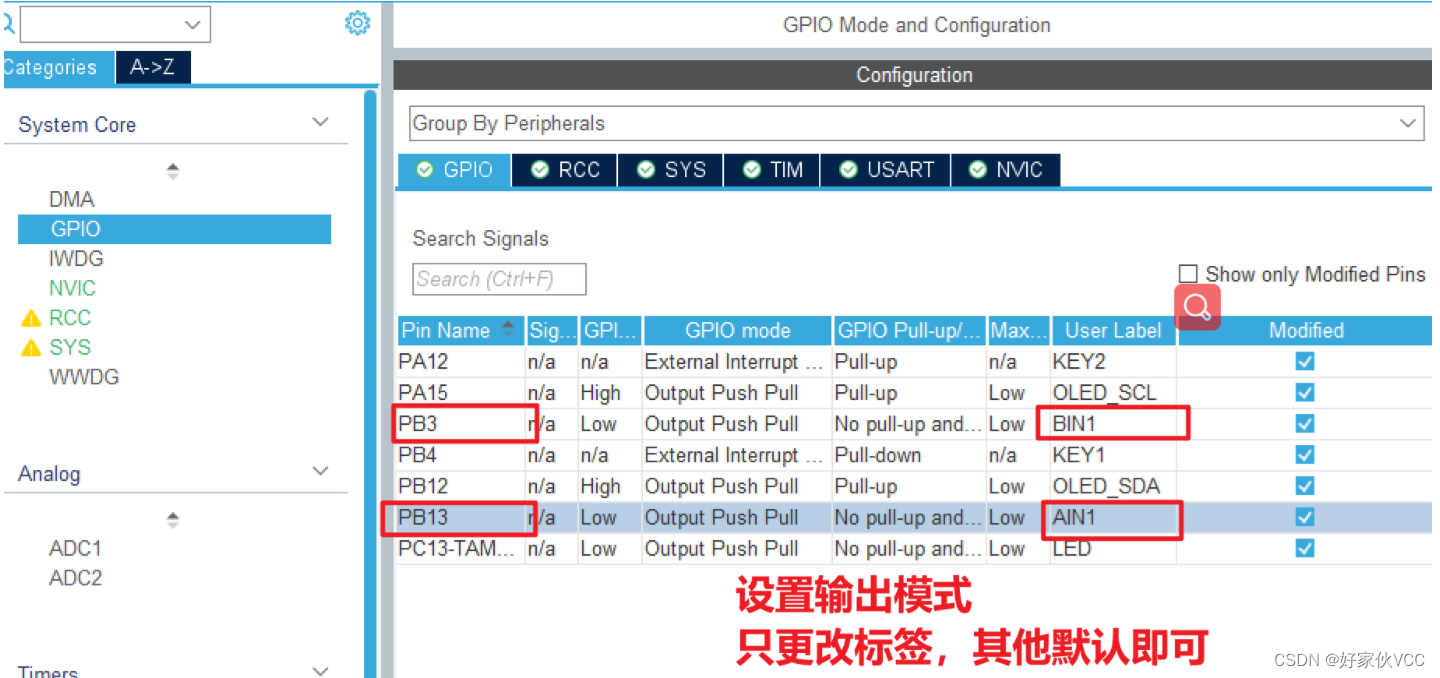
综合电机使用方法、C8T6单片机硬件资源、小车原理图我们要进行如下配置
PA11-TIM1_CH4 定时器PWM输出-PWMA 前面已经完成
PB13-GPIO输出-AIN1
PA8-TIM1_CH1 定时器PWM输出-PWMB 前面已经完成
PB3-GPIO输出-BIN1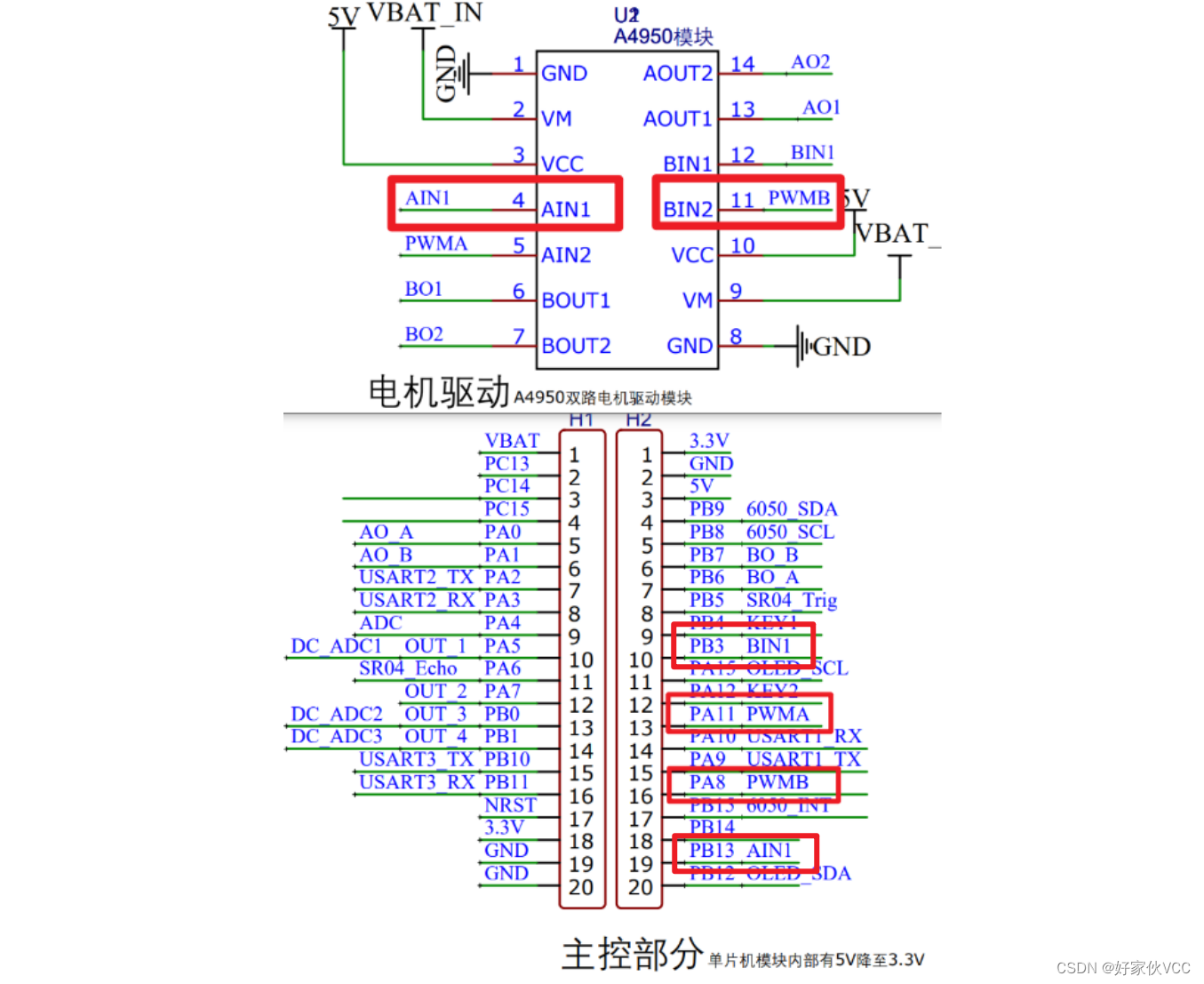 还有两个管脚没有初始化**
还有两个管脚没有初始化**
**
生成代码
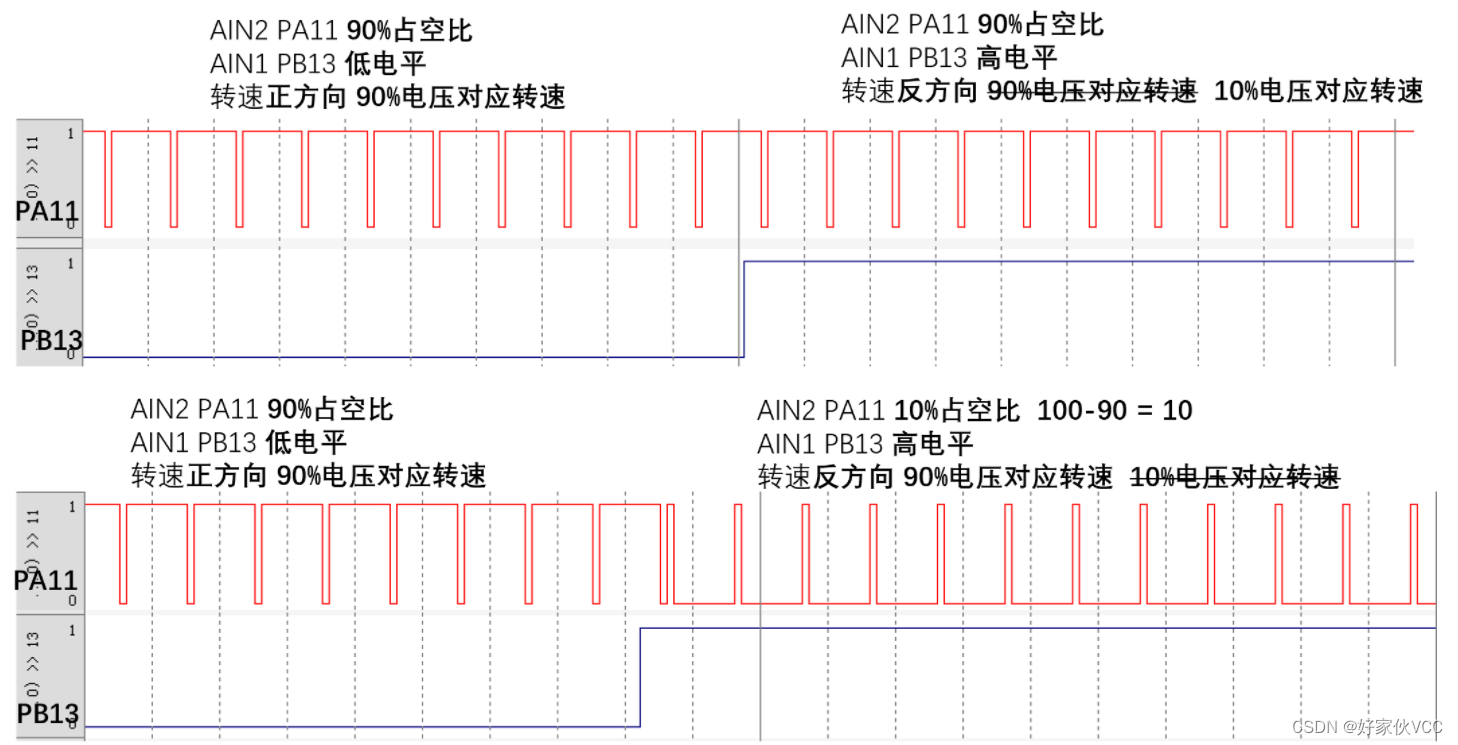
开始添加控制电机正反转与速度的代码,进行仿真和电机测试,示波器测量
添加AIN1、BIN1控制代码
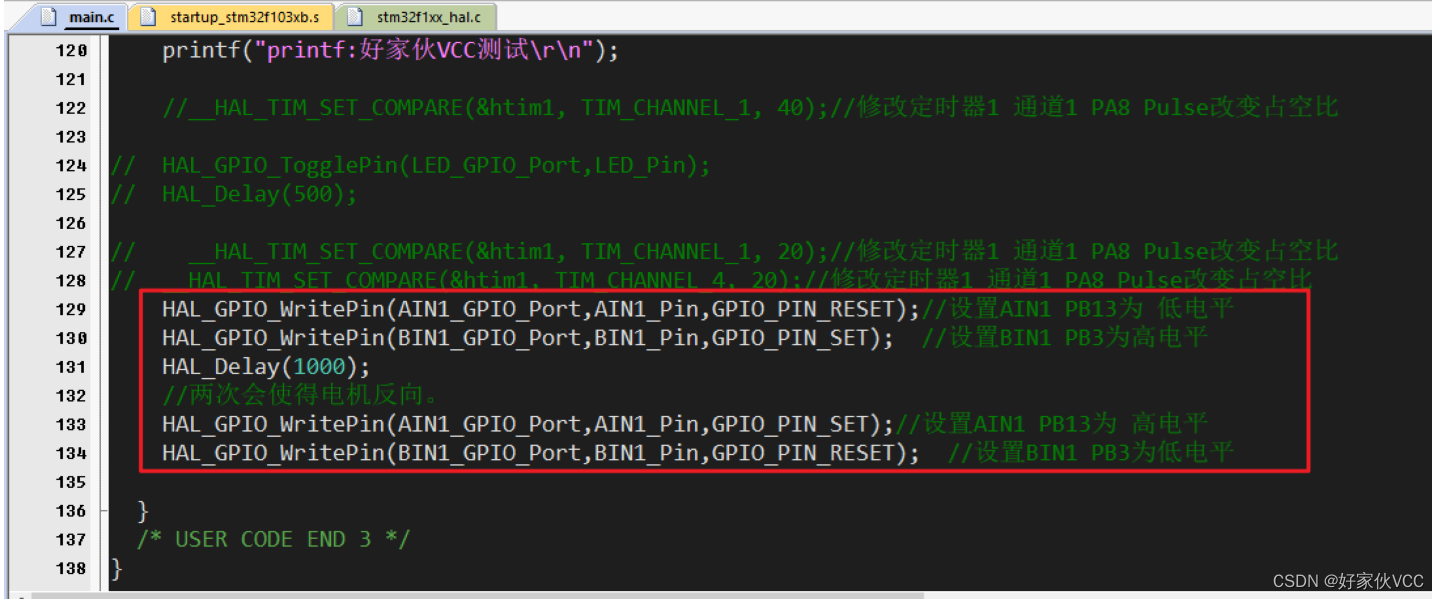
HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_RESET);//设置AIN1 PB13为 低电平
HAL_GPIO_WritePin(BIN1_GPIO_Port,BIN1_Pin,GPIO_PIN_SET); //设置BIN1 PB3为高电平
HAL_Delay(1000);
//两次会使得电机反向。
HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_SET);//设置AIN1 PB13为 高电平
HAL_GPIO_WritePin(BIN1_GPIO_Port,BIN1_Pin,GPIO_PIN_RESET); //设置BIN1 PB3为低电平
仿真测试代码
使用软件仿真
检测是否软件仿真设置正确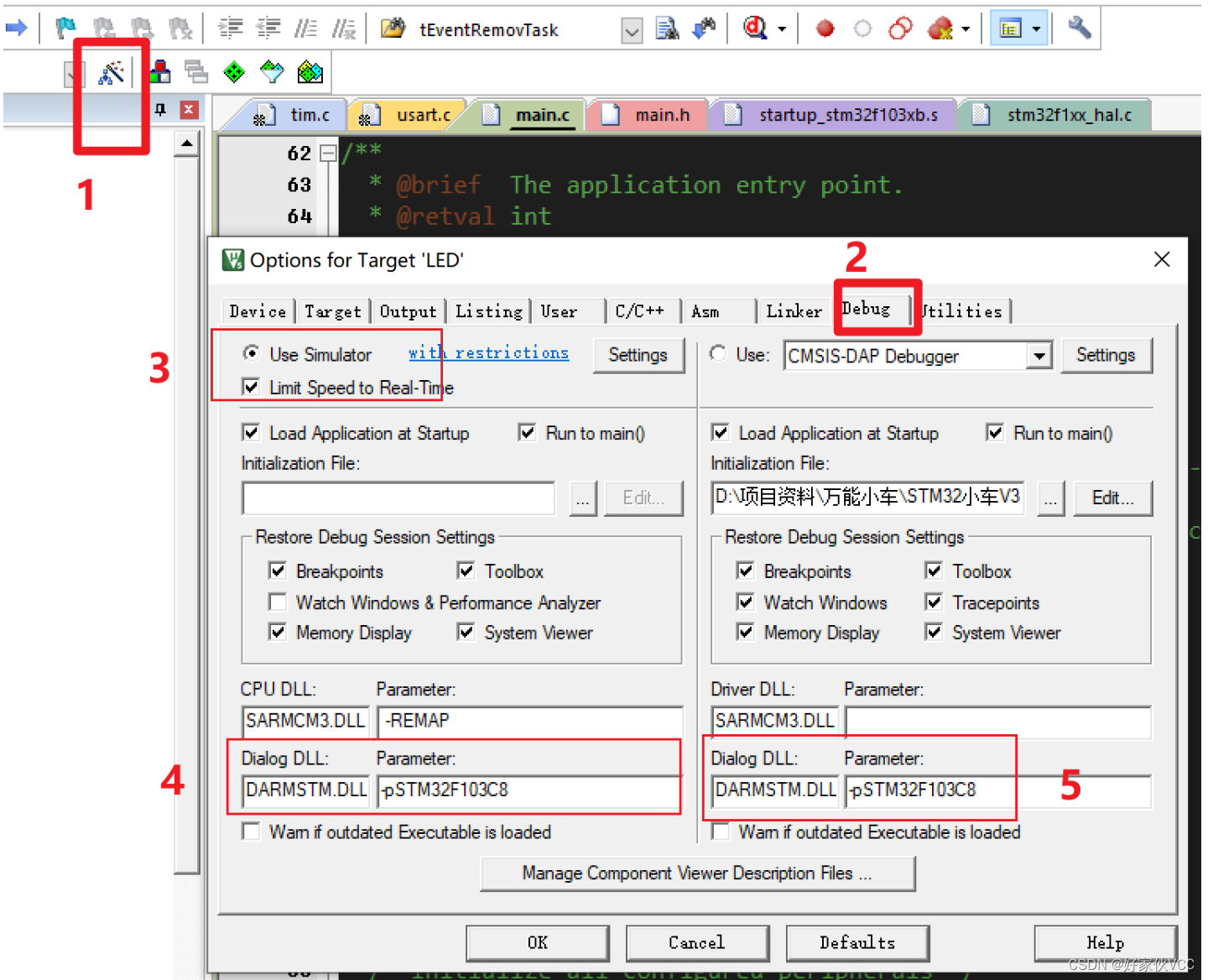
开启仿真-添加PB13和PB3到逻辑分析仪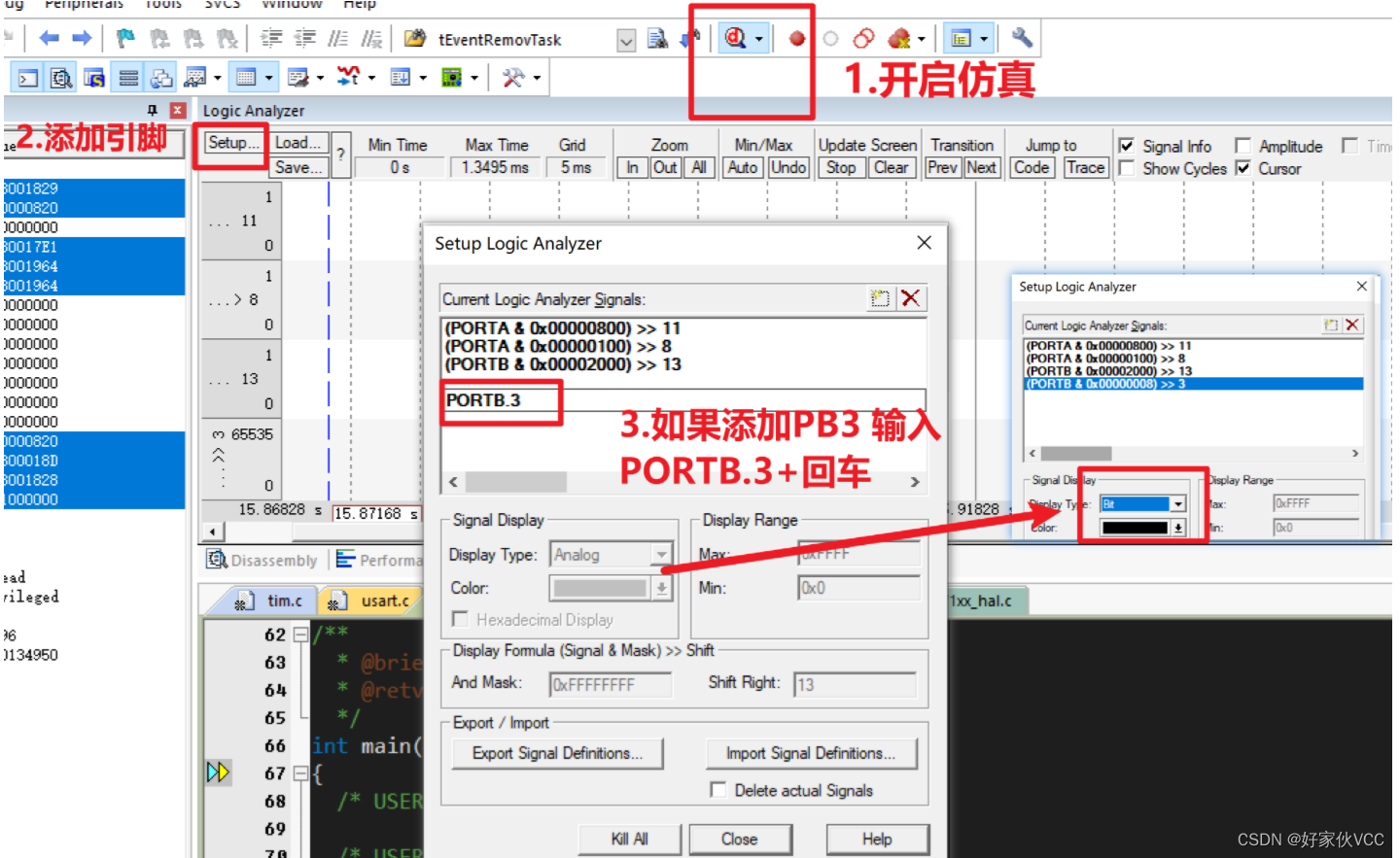
全速仿真运行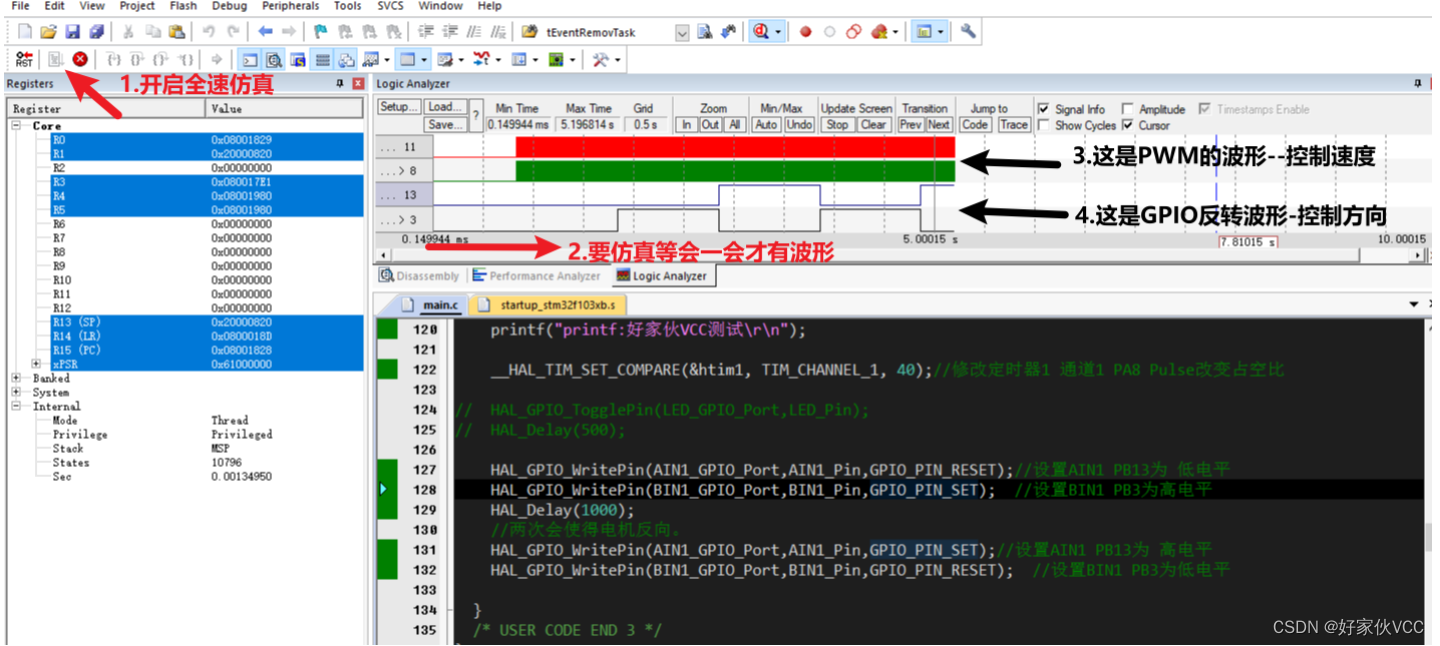
实物测试代码
如何让电机90%电压转速 旋转
烧录代码
6.3-编写电机转速开环控制函数(另外复制工程)
新建motor文件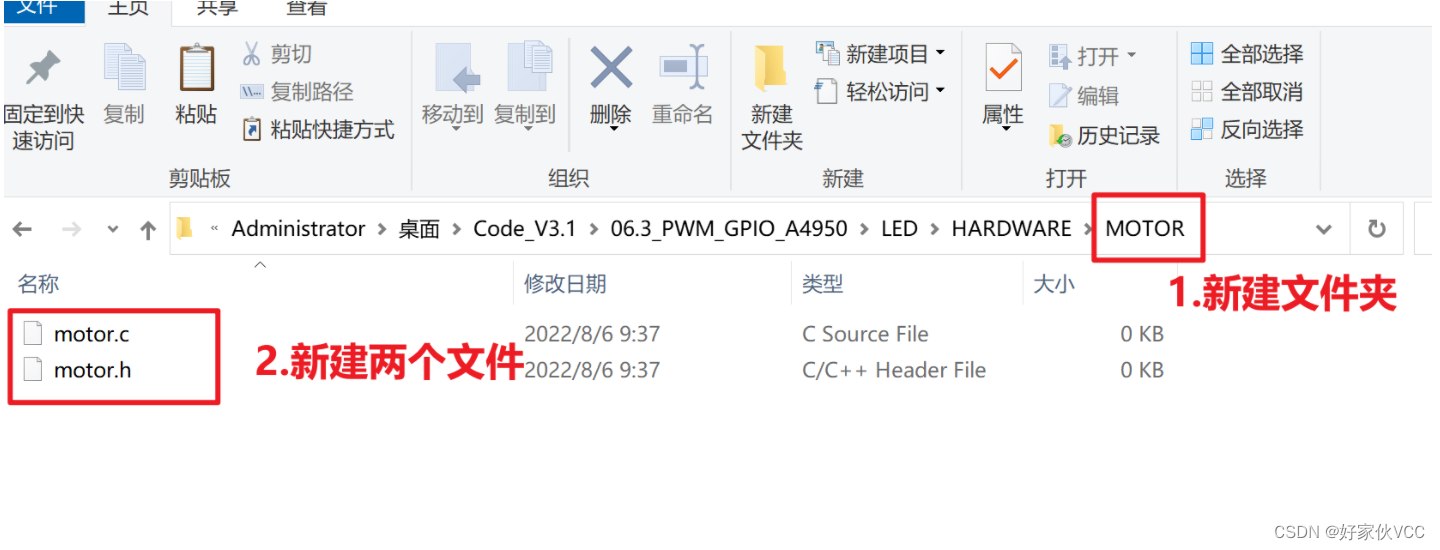
包含文件并添加编译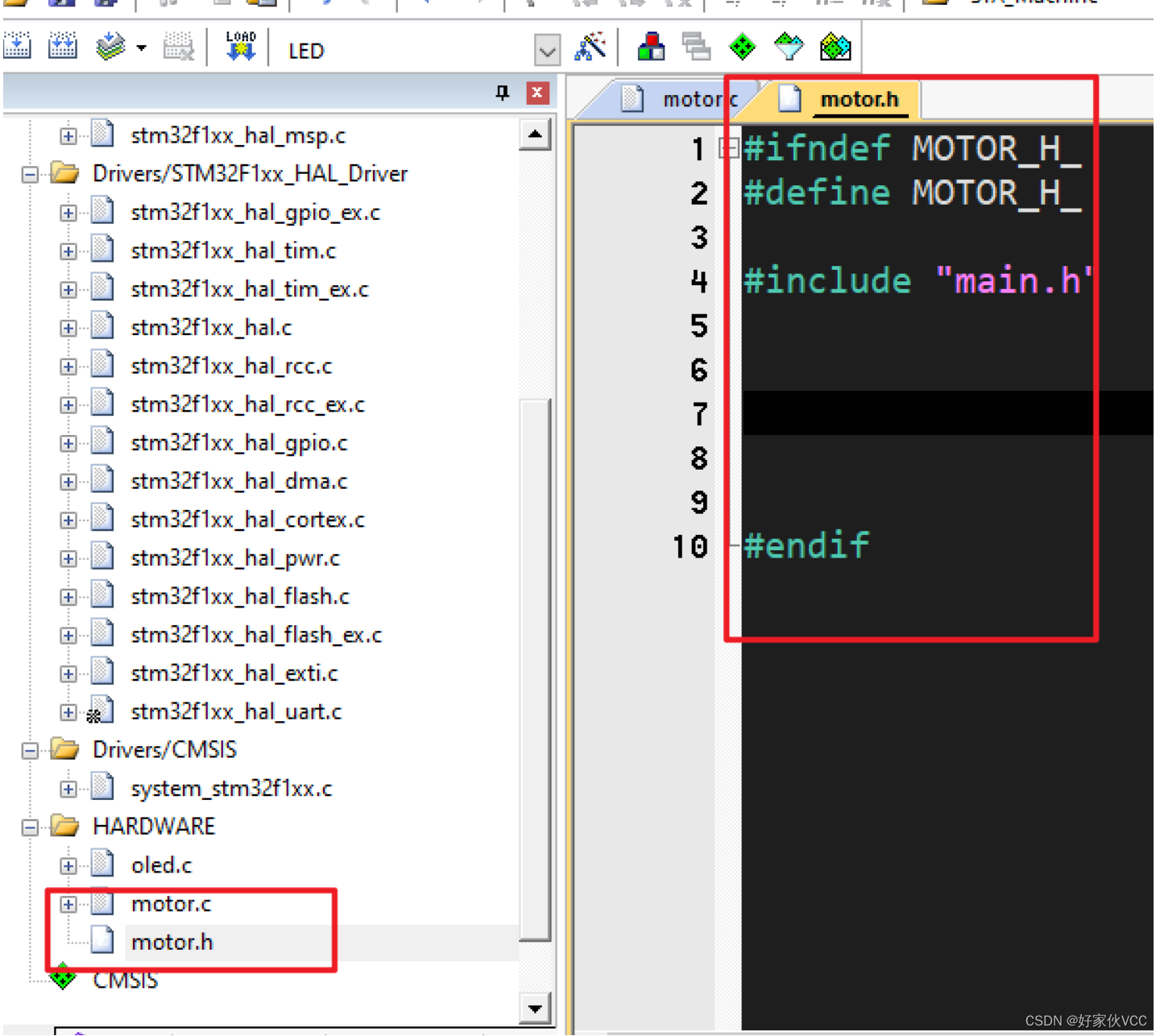
为了方便移植和使用,我们GPIO电平控制写成宏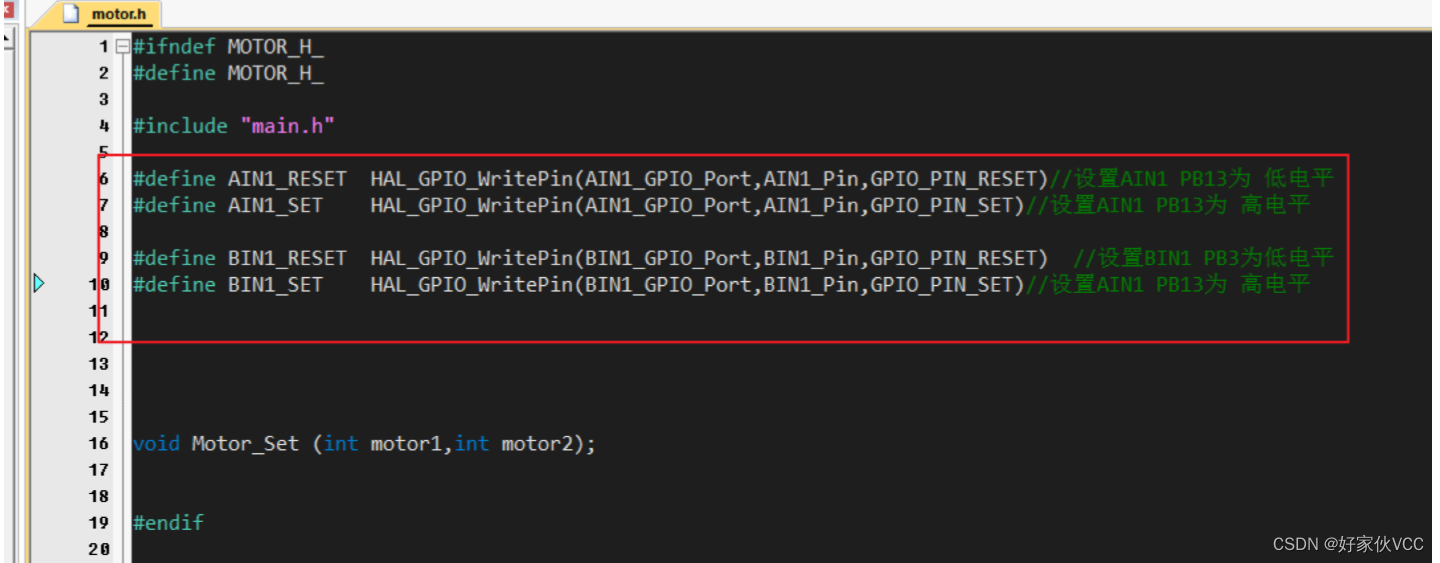
#define AIN1_RESET HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_RESET)//设置AIN1 PB13为 低电平
#define AIN1_SET HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_SET)//设置AIN1 PB13为 高电平
#define BIN1_RESET HAL_GPIO_WritePin(BIN1_GPIO_Port,BIN1_Pin,GPIO_PIN_RESET) //设置BIN1 PB3为低电平
#define BIN1_SET HAL_GPIO_WritePin(BIN1_GPIO_Port,BIN1_Pin,GPIO_PIN_SET)//设置AIN1 PB13为 高电平
下面我们编写小车电机方向和速度控制
/*******************
* @brief 设置两个电机转速和方向
* @param motor1:电机B设置参数、motor2:设置参数
* @param motor1: 输入1~100 对应控制B电机正方向速度在1%-100%、输入-1~-100 对应控制B电机反方向速度在1%-100%、motor2同理
* @return 无
*
*******************/
void Motor_Set (int motor1,int motor2)
{
//根据参数正负 设置选择方向
if(motor1 < 0) BIN1_SET;
else BIN1_RESET;
if(motor2 < 0) AIN1_SET;
else AIN1_RESET;
//motor1 设置电机B的转速
if(motor1 < 0)
{
if(motor1 < -99) motor1 = -99;//超过PWM幅值
//负的时候绝对值越小 PWM占空比越大
//现在的motor1 -1 -99
//给寄存器或者函数 99 1
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, (100+motor1));//修改定时器1 通道1 PA8 Pulse改变占空比
}
else{
if(motor1 > 99) motor1 = 99;
//现在是 0 1 99
//我们赋值 0 1 99
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, motor1);//修改定时器1 通道1 PA8 Pulse改变占空比
}
//motor2 设置电机A的转速
if(motor2 < 0)
{
if(motor2 < -99) motor2 = -99;//超过PWM幅值
//负的时候绝对值越小 PWM占空比越大
//现在的motor2 -1 -99
//给寄存器或者函数 99 1
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_4, (100+motor2));//修改定时器1 通道4 PA11 Pulse改变占空比
}
else{
if(motor2 > 99) motor2 = 99;
//现在是 0 1 99
//我们赋值 0 1 99
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_4, motor2);//修改定时器1 通道4 PA11 Pulse改变占空比
}
}
然后我们连接电机主函数进行测试
HAL_Delay(500);
Motor_Set(0,0);
本章结束兄弟们
下章继续-编码器测速部分
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
PWM
+关注
关注
114文章
5193浏览量
214256 -
STM32
+关注
关注
2270文章
10910浏览量
356626 -
电机驱动
+关注
关注
60文章
1219浏览量
86827
发布评论请先 登录
相关推荐
【ALIENTEK 战舰STM32开发板】STM32开发指南--第六章 跑马灯实验
第六章 跑马灯实验STM32最简单的外设莫过于IO口的高低电平控制了,本章将通过一个经典的跑马灯程序,带大家开启STM32之旅,通过本章的学习,你将了解到STM32的IO口作为输出使用
发表于 01-10 15:50
求王庆利《单片机设计标准教程》第六章的一个函数!!
在做一个设计,急需《单片机设计标准教程》里第六章 的I2C总线函数 #include“IIClib.h” 谁有帮忙拍张图片传一下
发表于 05-05 21:20
脉冲波形发生器与整形电路 第六章
脉冲波形发生器与整形电路 第六章
555定时器及其应用集成和其它单稳态触发器集成施密特触发器其它多谐振荡器电路脉冲产生与整形电路的应用
发表于 04-22 14:05
•42次下载
三相电路(第六章)
三相电路(第六章)
一、 三相电源及其连接若三个电压源的电压uA,uB,uC的最大值相等,频率相同,相位互差120°,则此三个电压源的组合称为对称
发表于 05-23 15:17
•38次下载
PCB布线设计经验谈附原理图(第六章)
PCB布线设计经验谈附原理图(第六章)
对于12位传感系统的布线,应用的电路是一负载单元电路,该电路可精确测量传感器上施加的
发表于 10-28 09:30
•1026次阅读






 工商网监
工商网监
评论